
Introducción
En esta lección, aprenderá sobre el sensor óptico y cómo puede usar la retroalimentación del sensor para optimizar su estrategia y su código para jugar Castle Crasher. También aprenderás a crear un algoritmo para codificar tu robot para encontrar Buckyballs de forma autónoma y completar el desafío Sweep the Field. Vea la animación a continuación para ver un ejemplo de cómo el robot podría moverse para detectar y eliminar las Buckyballs del campo sin caerse del borde.
Añadir un sensor óptico
En esta lección, aprenderás sobre el sensor óptico y explorarás cómo usarlo con el sensor de distancia para crear un algoritmo.
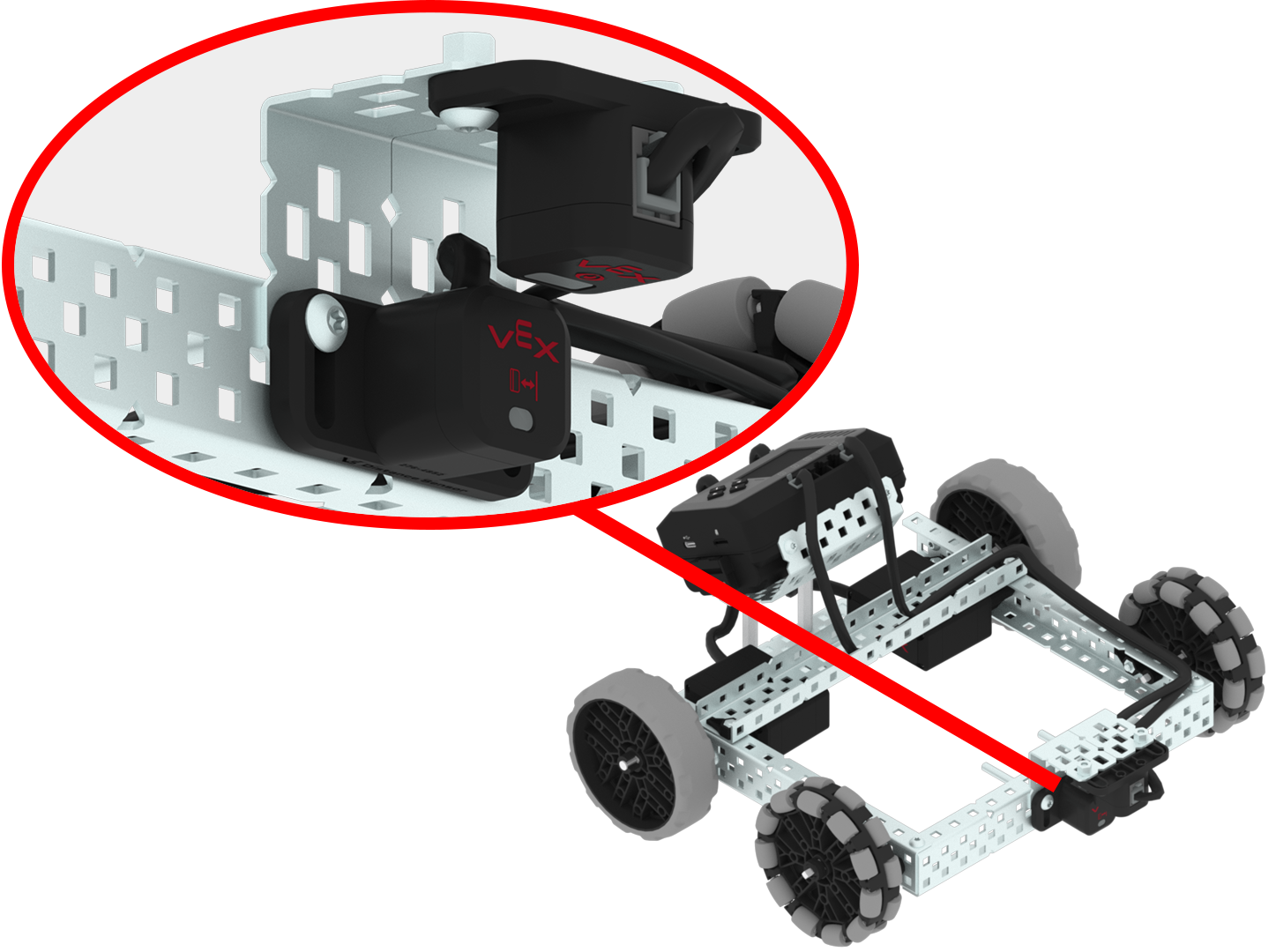
Añada los sensores ópticos y de distancia a su BaseBot como se muestra en esta imagen.
- Añada un canal C de 1x2x1x16 a la parte delantera del BaseBot como se muestra.
- Luego, monte el sensor de distancia en el canal C mirando hacia afuera, como se muestra en la imagen.
- Añada el sensor óptico apuntando hacia abajo.
- El sensor de distancia debe conectarse al puerto 5 y el sensor óptico al puerto 1.
Seleccione < Volver a las lecciones para volver a la descripción general de la lección.
Selecciona Siguiente > para obtener información sobre el sensor óptico y cómo puedes usar la retroalimentación del sensor y los algoritmos para codificar tu robot para encontrar y empujar Buckyballs fuera de un campo.