
Giới thiệu
Trong Bài học này, bạn sẽ tìm hiểu về Cảm biến quang học và cách sử dụng phản hồi cảm biến để tối ưu hóa chiến lược và mã của mình khi chơi Castle Crasher. Bạn cũng sẽ học cách tạo thuật toán để lập trình cho robot của mình tự động tìm Buckyball và hoàn thành thử thách Quét sạch sân đấu. Hãy xem hình ảnh động bên dưới để biết ví dụ về cách robot có thể di chuyển để phát hiện và dọn sạch Buckyball khỏi Sân mà không bị rơi khỏi mép.
Thêm cảm biến quang học
Trong Bài học này, bạn sẽ tìm hiểu về Cảm biến quang học và khám phá cách sử dụng nó với Cảm biến khoảng cách để tạo ra thuật toán.
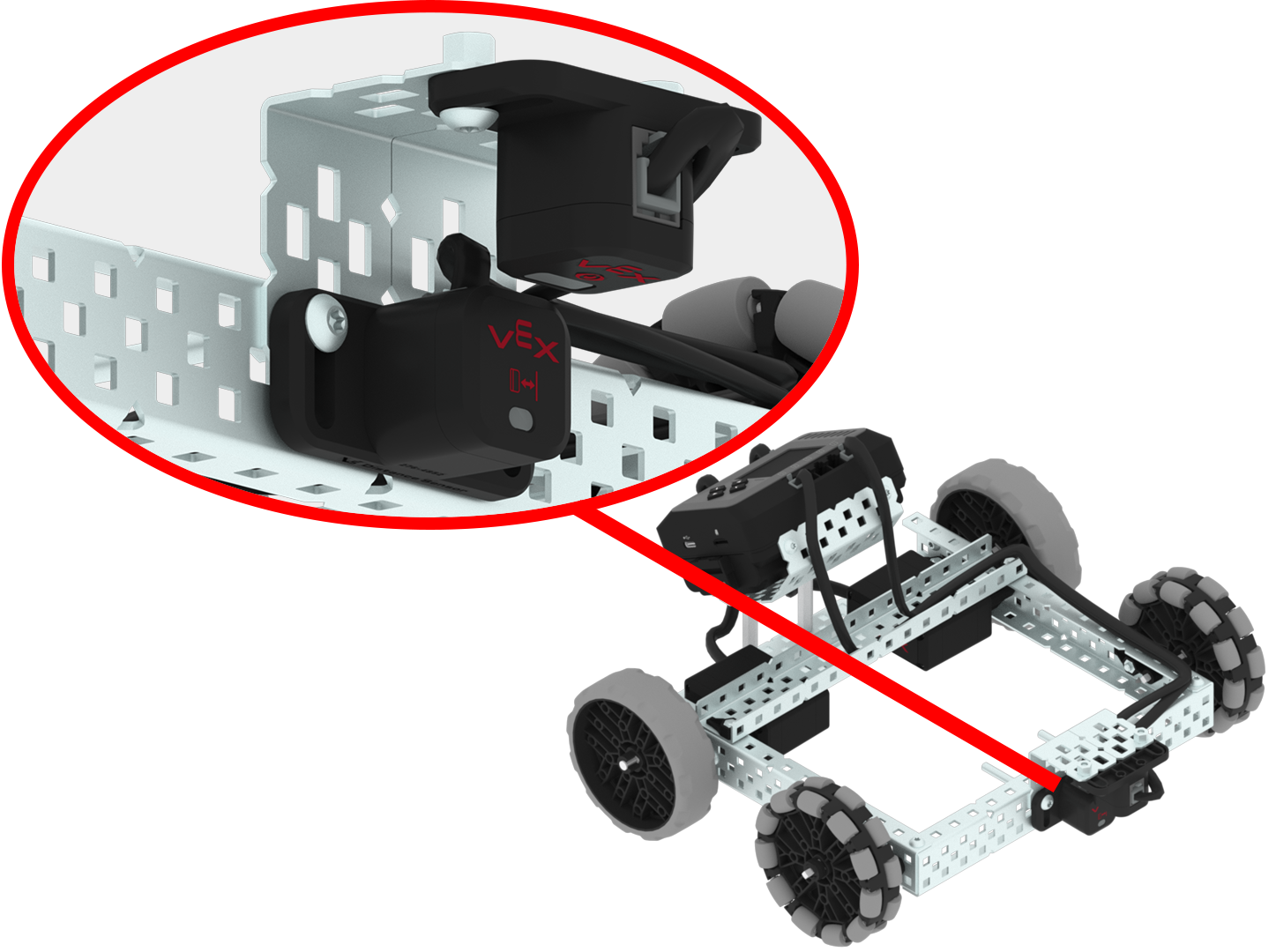
Thêm cảm biến quang học và cảm biến khoảng cách vào BaseBot như trong hình ảnh này.
- Thêm một kênh C 1x2x1x16 vào mặt trước của BaseBot như minh họa.
- Sau đó, gắn Cảm biến khoảng cách vào Kênh C hướng ra ngoài như trong hình minh họa.
- Thêm cảm biến quang học hướng xuống dưới.
- Cảm biến khoảng cách phải được cắm vào Cổng 5 và Cảm biến quang học phải được cắm vào Cổng 1.
Chọn< Quay lại Bài họcđể quay lại Tổng quan về bài học.
ChọnTiếp theo >để tìm hiểu về Cảm biến quang học và cách bạn có thể sử dụng phản hồi cảm biến và thuật toán để lập trình cho rô-bốt của mình nhằm tìm và đẩy Buckyball ra khỏi Sân.