
บทนำ
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับออปติคัลเซนเซอร์และวิธีที่คุณสามารถใช้ข้อเสนอแนะของ เซ็นเซอร์เพื่อเพิ่มประสิทธิภาพกลยุทธ์และรหัสของคุณ สำหรับการเล่น Castle Crasher นอกจากนี้คุณยังจะได้เรียนรู้วิธีสร้างอัลกอริทึมเพื่อเขียนโค้ดหุ่นยนต์ของคุณเพื่อค้นหา Buckyballs โดยอัตโนมัติและทำภารกิจ Sweep the Field ให้สำเร็จ ดูภาพเคลื่อนไหวด้านล่างเพื่อดูตัวอย่างว่าหุ่นยนต์สามารถเคลื่อนที่เพื่อตรวจจับและล้างบัคกี้บอลออกจากสนามโดยไม่ตกจากขอบได้อย่างไร
เพิ่มออปติคัลเซนเซอร์
ในบทเรียนนี้ท่านจะได้เรียนรู้เกี่ยวกับ ออปติคัลเซนเซอร์และสำรวจ วิธีใช้เซ็นเซอร์ระยะทางเพื่อสร้างอัลกอริทึม
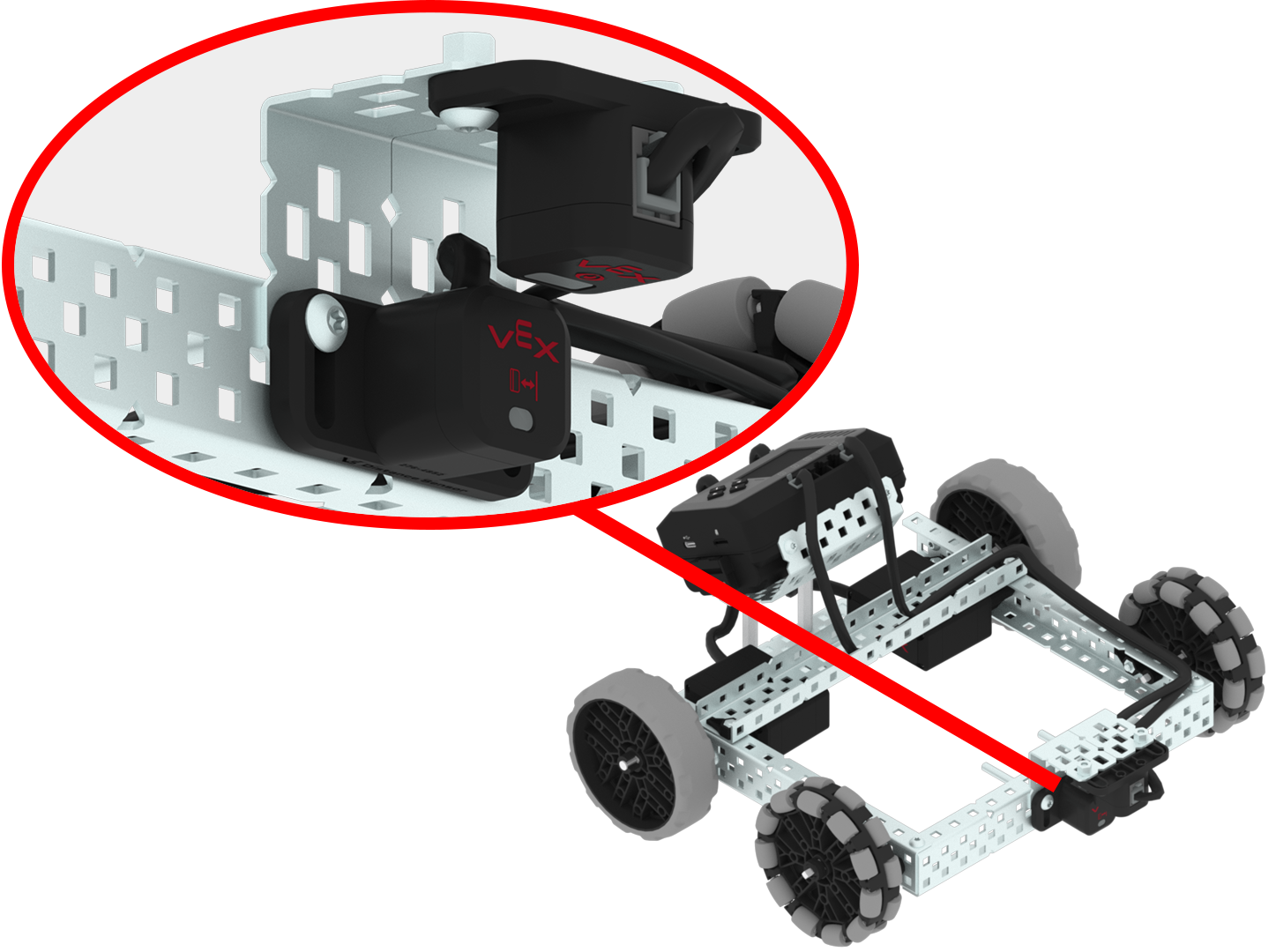
เพิ่มออปติคัลและเซ็นเซอร์ระยะทางลงใน BaseBot ของคุณตามที่แสดงในภาพนี้
- เพิ่ม 1x2x1x16 C-Channel ที่ด้านหน้าของ BaseBot ตามที่แสดง
- จากนั้นให้ติดตั้งเซ็นเซอร์ระยะทาง เข้ากับช่อง C ที่หันออกตามที่แสดงในภาพ
- เพิ่มออปติคัลเซนเซอร์ชี้ลง
- ควรเสียบเซ็นเซอร์ระยะทางเข้ากับพอร์ต 5 และเซ็นเซอร์ตรวจจับแสงเข้ากับพอร์ต 1
เลือก < กลับไปที่บทเรียน เพื่อกลับไปที่ภาพรวมของบทเรียน
เลือก ถัดไป > เพื่อเรียนรู้เกี่ยวกับออปติคัลเซนเซอร์และวิธีที่คุณสามารถใช้ข้อเสนอแนะและอัลกอริทึมของเซ็นเซอร์ในการเขียนโค้ดหุ่นยนต์ของคุณเพื่อค้นหาและผลักบัคกี้บอลออกจากฟิลด์