
Introdução
Nesta Lição, aprenderá sobre o Sensor Óptico e como pode usar o feedback do sensor para otimizar a sua estratégia e o seu código para jogar Castle Crasher. Você também aprenderá a criar um algoritmo para codificar seu robô para encontrar Buckyballs de forma autônoma e concluir o desafio Varrer o Campo. Assista à animação abaixo para ver um exemplo de como o robô pode se mover para detectar e limpar Buckyballs do Campo sem cair da borda.
Adicionar um sensor óptico
Nesta lição, você aprende sobre o sensor óptico e explora como usá-lo com o sensor de distância para criar um algoritmo.
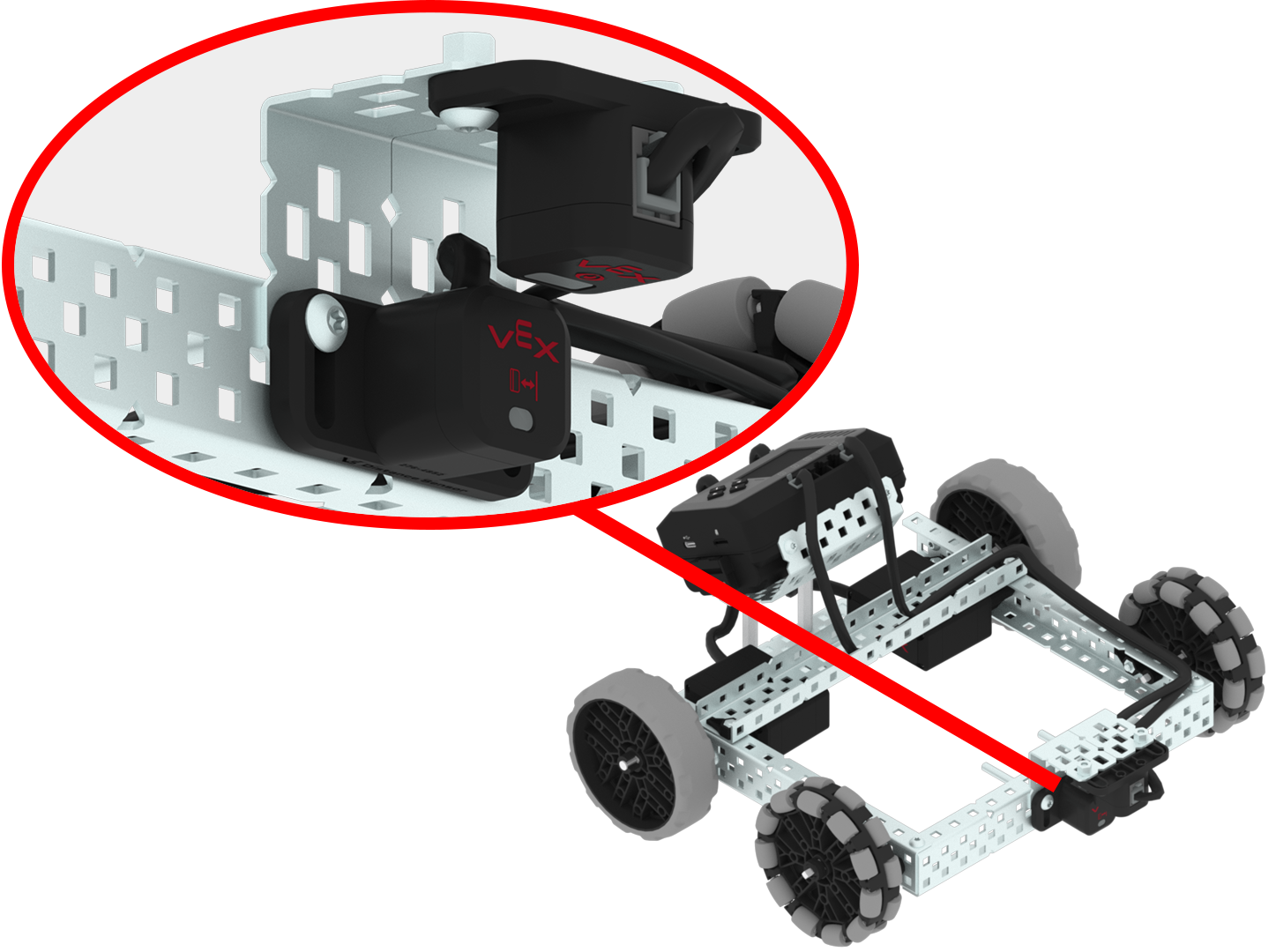
Adicione os sensores ópticos e de distância ao seu BaseBot, conforme mostrado nesta imagem.
- Adicione um canal C 1x2x1x16 à frente do BaseBot, como mostrado.
- Em seguida, monte o sensor de distância no canal C voltado para fora, conforme mostrado na imagem.
- Adicione o Sensor Óptico apontando para baixo.
- O sensor de distância deve ser conectado à porta 5 e o sensor óptico à porta 1.
Selecione < Retornar às Aulas para voltar à Visão Geral da Aula.
Selecione Avançar > para saber mais sobre o Sensor Óptico e como pode usar o feedback do sensor e algoritmos para codificar o seu robô para encontrar e empurrar Buckyballs para fora de um Campo.