
Invoering
In deze les leert u over de optische sensor en hoe u sensorfeedback kunt gebruiken om uw strategie en uw code voor het spelen van Castle Crasher te optimaliseren. Je leert ook hoe je een algoritme maakt om je robot te programmeren, zodat deze zelfstandig Buckyballs kan vinden en de Sweep the Field-uitdaging kan voltooien. Bekijk de onderstaande animatie om te zien hoe de robot Buckyballs kan detecteren en van het veld kan verwijderen zonder over de rand te vallen.
Voeg een optische sensor toe
In deze les leert u over de optische sensor en hoe u deze samen met de afstandssensor kunt gebruiken om een algoritme te maken.
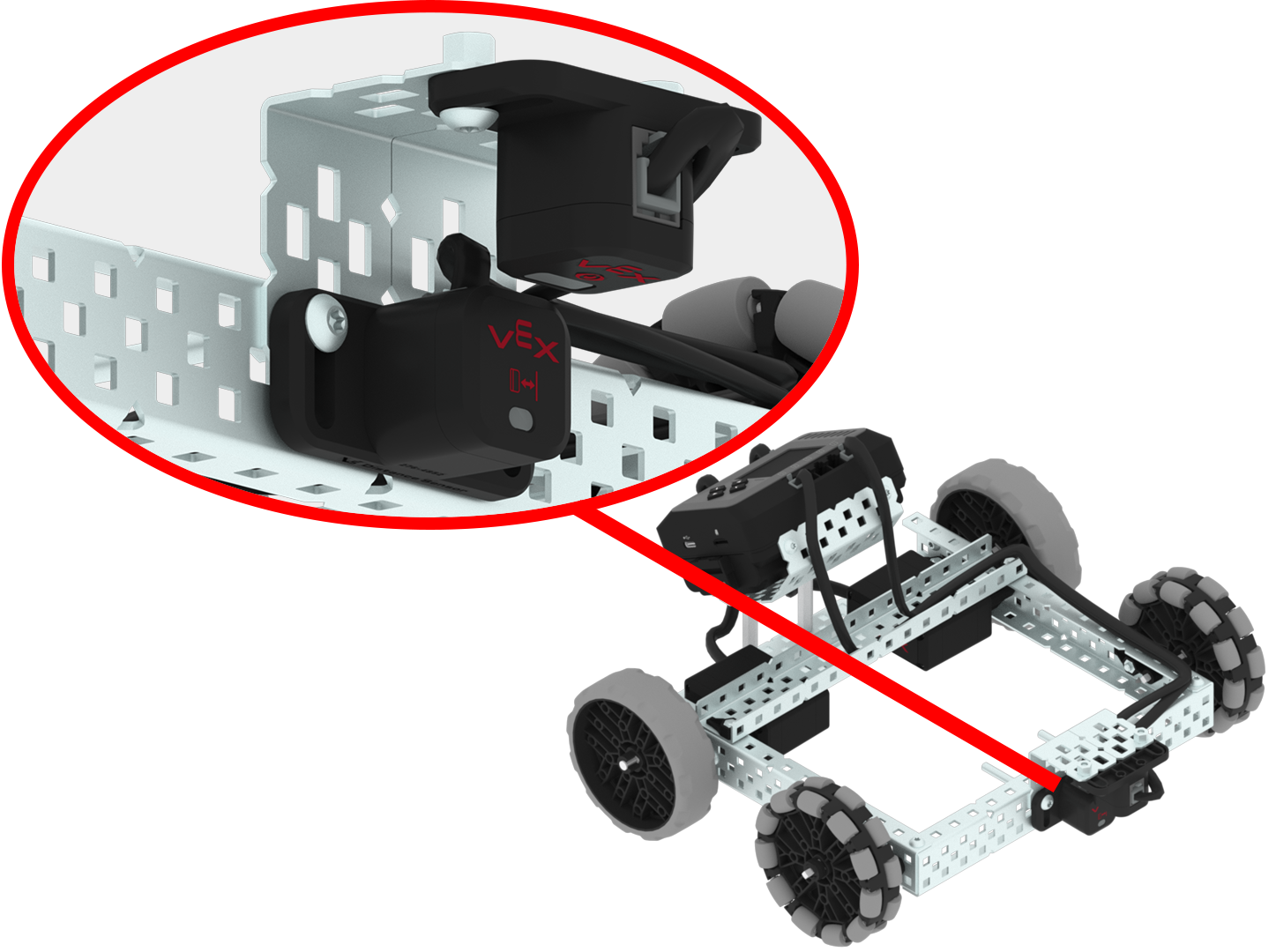
Voeg de optische sensoren en afstandssensoren toe aan uw BaseBot zoals weergegeven in deze afbeelding.
- Voeg een 1x2x1x16 C-kanaal toe aan de voorkant van de BaseBot zoals afgebeeld.
- Bevestig vervolgens de afstandssensor aan het C-kanaal, met de punt naar buiten gericht, zoals weergegeven in de afbeelding.
- Voeg de optische sensor toe die naar beneden wijst.
- De afstandssensor moet op poort 5 worden aangesloten en de optische sensor op poort 1.
Selecteer< Terug naar lesom terug te keren naar het lesoverzicht.
SelecteerVolgende >om meer te weten te komen over de optische sensor en hoe u sensorfeedback en algoritmen kunt gebruiken om uw robot te programmeren om Buckyballs te vinden en van een veld te duwen.