
Il distruttore del castello
6 Lezioni
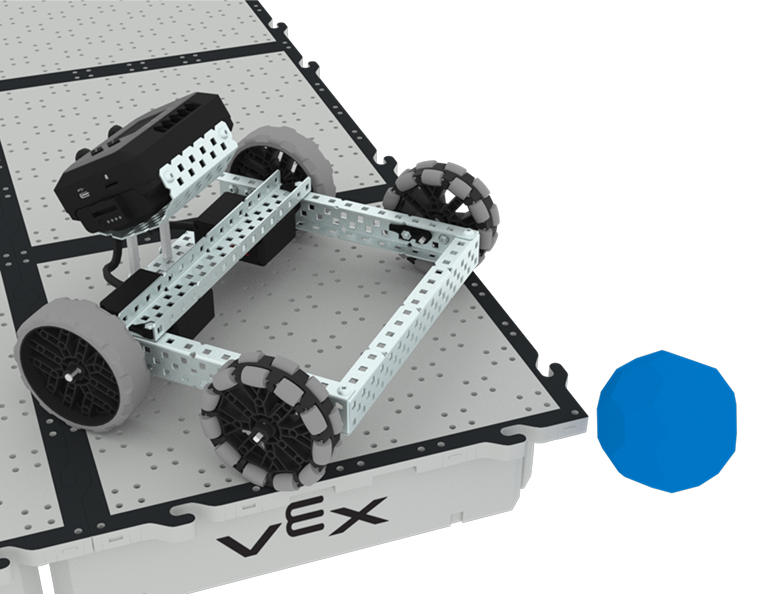
In questa unità esplorerai come utilizzare i sensori ottici e di distanza per cercare, schiantare e liberare i "castelli" di Buckyball per ottenere punti nella competizione Castle Crasher!
Visita il Portale degli insegnanti per materiali di supporto e video per gli insegnanti sui contenuti e sulla facilitazione delle lezioni di Castle Crasher.
Lezione 1: Introduzione
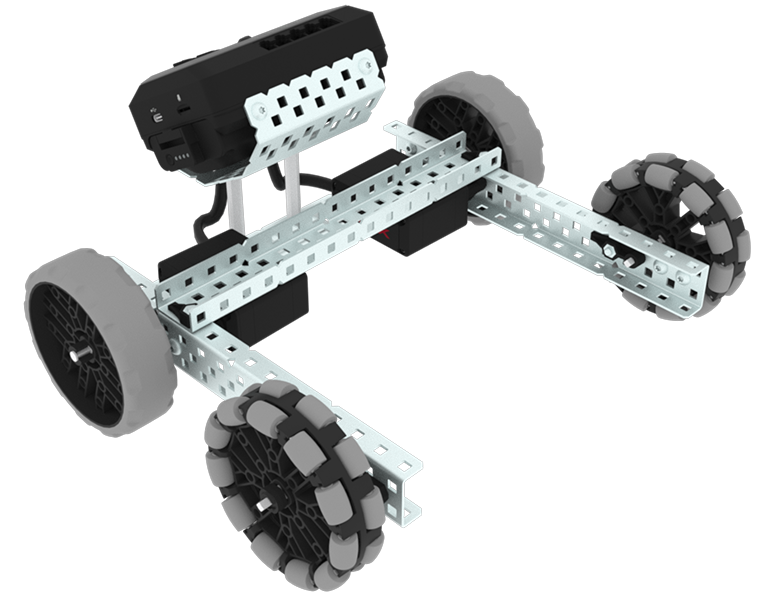
In questa lezione, ti verrà presentata la competizione Castle Crasher, costruirai il BaseBot e ti preparerai a programmare.
Lezione 2: Castle Crasher senza sensori
In questa lezione, imparerai a calcolare gli angoli e a cambiare la velocità del tuo robot in modo da poter competere nella Sfida Sfide rapide Buckyball.
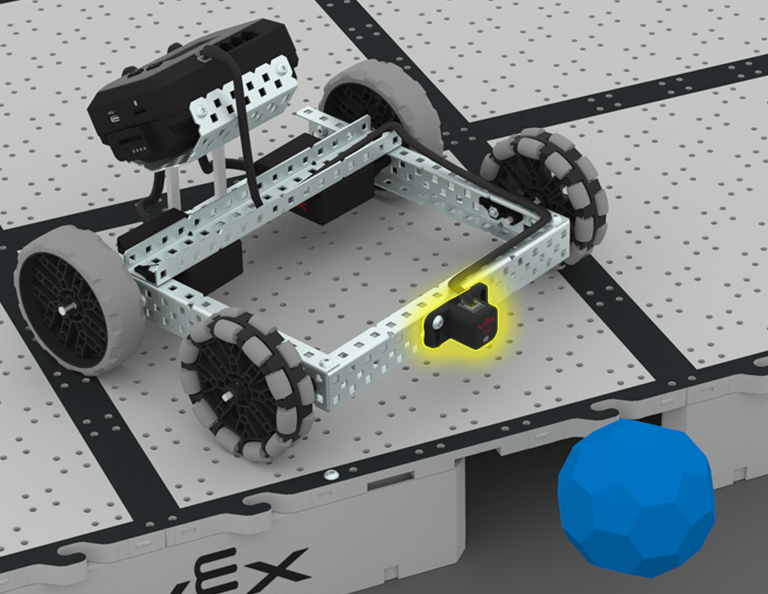
Lezione 3: Castle Crasher + sensore di distanza
In questa lezione imparerai cos'è il sensore di distanza e come può essere utilizzato sul tuo robot. Imparerai anche a conoscere il blocco [Wait until] e come può essere utilizzato in un progetto EXP VEXcode. Quindi applicherai ciò che hai imparato per competere nella Sfida Sense and Sweep!
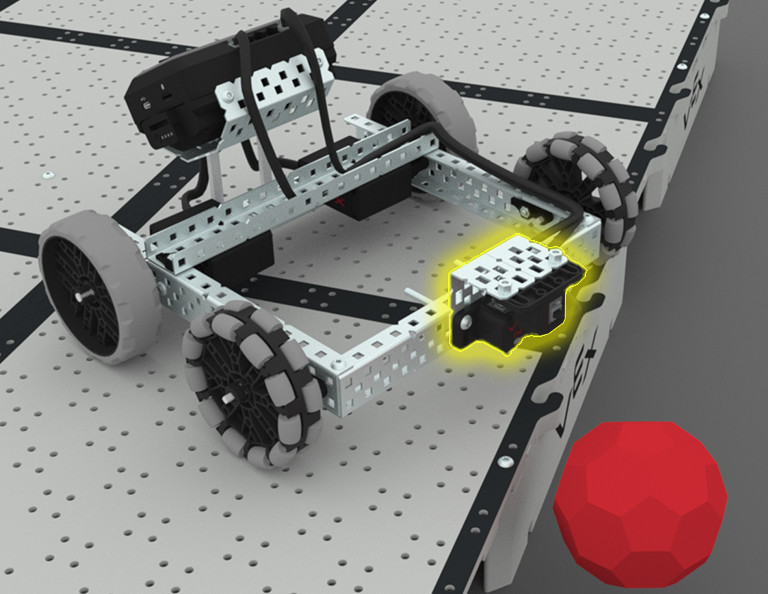
Lezione 4: Creazione di algoritmi
In questa lezione, imparerai a conoscere il sensore ottico e come creare un algoritmo che utilizza il feedback del sensore. Quindi codificherai il tuo robot per trovare autonomamente le Buckyball e spingerle fuori dal campo nella Sfida Sweep the Field.
Lezione 5: Competizione Castle Crasher
In questa lezione applicherai quanto appreso dalle lezioni precedenti per competere in una competizione Castle Crasher!

Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.