
Zavedení
V této lekci se dozvíte o optickém senzoru a o tom, jak můžete využít zpětnou vazbu ze senzorů k optimalizaci strategie a kódu pro hraní Castle Crasher. Také se naučíte, jak vytvořit algoritmus pro naprogramování robota tak, aby autonomně hledal Buckybally a splnil výzvu Sweep the Field. Podívejte se na animaci níže a uvidíte příklad toho, jak by se robot mohl pohybovat, aby detekoval a odstraňoval Buckybally z pole, aniž by spadl z okraje.
Přidejte optický senzor
V této lekci se dozvíte o optickém senzoru a prozkoumáte, jak jej použít se senzorem vzdálenosti k vytvoření algoritmu.
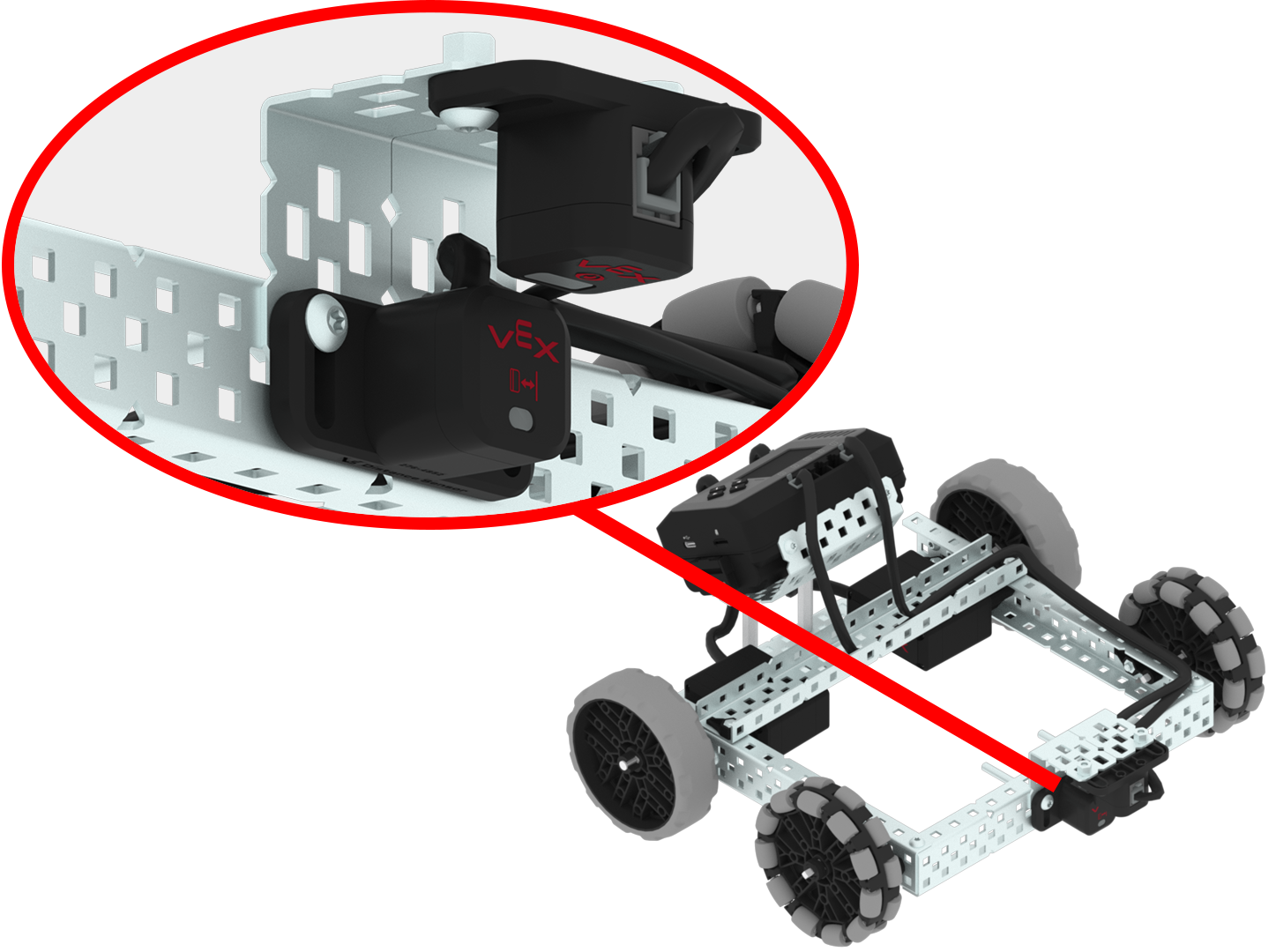
Přidejte optické a vzdálenostní senzory k vašemu BaseBotovi, jak je znázorněno na tomto obrázku.
- Přidejte C-kanál o rozměrech 1x2x1x16 na přední stranu BaseBota, jak je znázorněno.
- Poté namontujte senzor vzdálenosti na C-kanálu směřující ven, jak je znázorněno na obrázku.
- Přidejte optický senzor směřující dolů.
- Snímač vzdálenosti by měl být zapojen do portu 5 a optický senzor do portu 1.
Vyberte< Zpět k lekcímpro návrat do přehledu lekcí.
VyberteDalší >a dozvíte se o optickém senzoru a o tom, jak můžete pomocí zpětné vazby a algoritmů ze senzorů naprogramovat robota, aby našel a odtlačil Buckybally z pole.