
![]() Strumenti per l'insegnante
-
Schema delle attività
Strumenti per l'insegnante
-
Schema delle attività
-
Questa esplorazione introdurrà gli studenti al ridimensionamento e alla conversione delle unità disegnando e progettando un ippodromo. Gli studenti lavoreranno in gruppi per trovare un'area dove poter svolgere il loro corso. Misureranno quindi l'area a loro disposizione per il corso e disegneranno quest'area con le dimensioni corrette nel loro taccuino di ingegneria. Una volta che gli studenti avranno lo schizzo delle dimensioni effettive del corso, utilizzeranno le conversioni di unità per ridimensionare il corso in modo che si adatti al loro taccuino di ingegneria.
-
Una volta che il corso è ridotto. Disegneranno anche una versione ridotta dello Speedbot lungo il loro percorso in modo da poter visualizzare quanto è grande/piccolo il robot rispetto al loro percorso. Ciò li aiuterà a decidere come il robot può percorrere il percorso. Ad esempio, le curve sono abbastanza ampie? Il robot riesce a passare facilmente?
-
Una volta che il gruppo avrà progettato il percorso in scala ridotta, utilizzerà queste dimensioni per tracciare il percorso a grandezza naturale utilizzando nastro adesivo o altri materiali. Quindi guideranno il loro robot attraverso il corso utilizzando il programma driver per testare e garantire che le misurazioni e i calcoli siano corretti. Gli studenti saranno incoraggiati a testare e modificare le dimensioni del loro corso come meglio credono.
-
Esiste la possibilità di ridimensionare utilizzando carta millimetrata invece di eseguire conversioni multiple.
-
Queste abilità li aiuteranno ad avere successo nella Robo Rally Challenge dove dovranno combinare il loro percorso con un altro gruppo e guidare il robot attraverso il nuovo percorso combinato il più velocemente possibile!
| Quantità | Materiale necessario |
|---|---|
| 1 |
Quaderno di ingegneria |
| 1 |
Rotolo di nastro |
| 1 |
Speedbot VEX V5 con batteria carica |
| 1 |
Controllore VEX V5 |
| 1 |
Metro o righello |
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Utilizza le misurazioni dei robot durante la progettazione degli ippodromi per garantire che i robot abbiano spazio sufficiente per muoversi e girare senza attraversare le linee del percorso.
Passaggio 1: misurazione del robot

Misura la lunghezza e la larghezza dello Speedbot VEX V5 utilizzando un metro o un righello e scrivi le sue dimensioni sul tuo quaderno di ingegneria.
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Consentire ai gruppi di utilizzare spazi diversi all'interno della classe, quando possibile, ma lo stesso spazio può essere utilizzato se ce n'è solo uno disponibile. Considera l'idea di consentire l'utilizzo dello stesso spazio in diverse configurazioni chiedendo ai gruppi di riapplicare il nastro sulle loro corsie.
Passaggio 2: Disegnare e misurare l'area

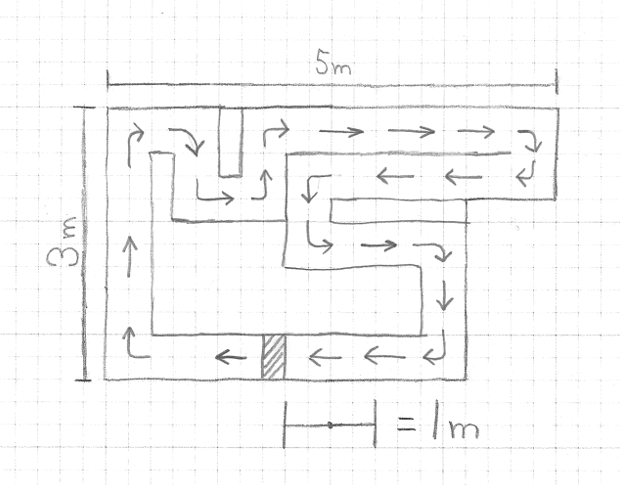
Disegna un semplice schizzo dell'area disponibile per la progettazione del tuo ippodromo nel tuo taccuino di ingegneria. Utilizzando un metro o un righello, misura le dimensioni dell'area e registrale sullo schizzo dell'area nel tuo quaderno di ingegneria.
![]() Casella degli strumenti per l'insegnante
Casella degli strumenti per l'insegnante
Un'altra opzione invece di misurare tutte le distanze in scala sarebbe quella di utilizzare la carta millimetrata per facilitare il disegno del percorso in scala.

Utilizzando la carta millimetrata nel quaderno di ingegneria degli studenti, chiedi loro di creare una versione in scala dell'area che hai disegnato utilizzando le misurazioni registrate. Prima di iniziare, decidi la scala alla quale desideri ricreare l'area in metri. Ad esempio, ogni quadrato sulla carta millimetrata potrebbe rappresentare un singolo metro quadrato. Nell'esempio sopra, un metro quadrato è composto da 4 riquadri per 4 riquadri sulla carta millimetrata.
Dovresti considerare la dimensione della carta millimetrata quando scegli la scala. Una scala troppo grande potrebbe non adattarsi alla carta millimetrata che stai utilizzando. Aggiungi una versione in scala dello Speedbot VEX V5 alla tua carta millimetrata per visualizzare le sue dimensioni in scala rispetto all'area in scala che hai creato.
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Inizia chiedendo agli studenti di convertirsi in un'unità di misura standard convertendo le misurazioni in centimetri dei robot in metri (in decimali) o convertendo le misurazioni in metri dello spazio in centimetri. Utilizza l'unità di misura standard per creare più facilmente la scala.
Le misure approssimative dello Speedbot sono 30 cm sul lato anteriore e 24 cm sul lato.
30 cm = 300 mm = 0,3 m
24 cm = 240 mm = 0,24 m
Passaggio 3: Creazione di una versione in scala
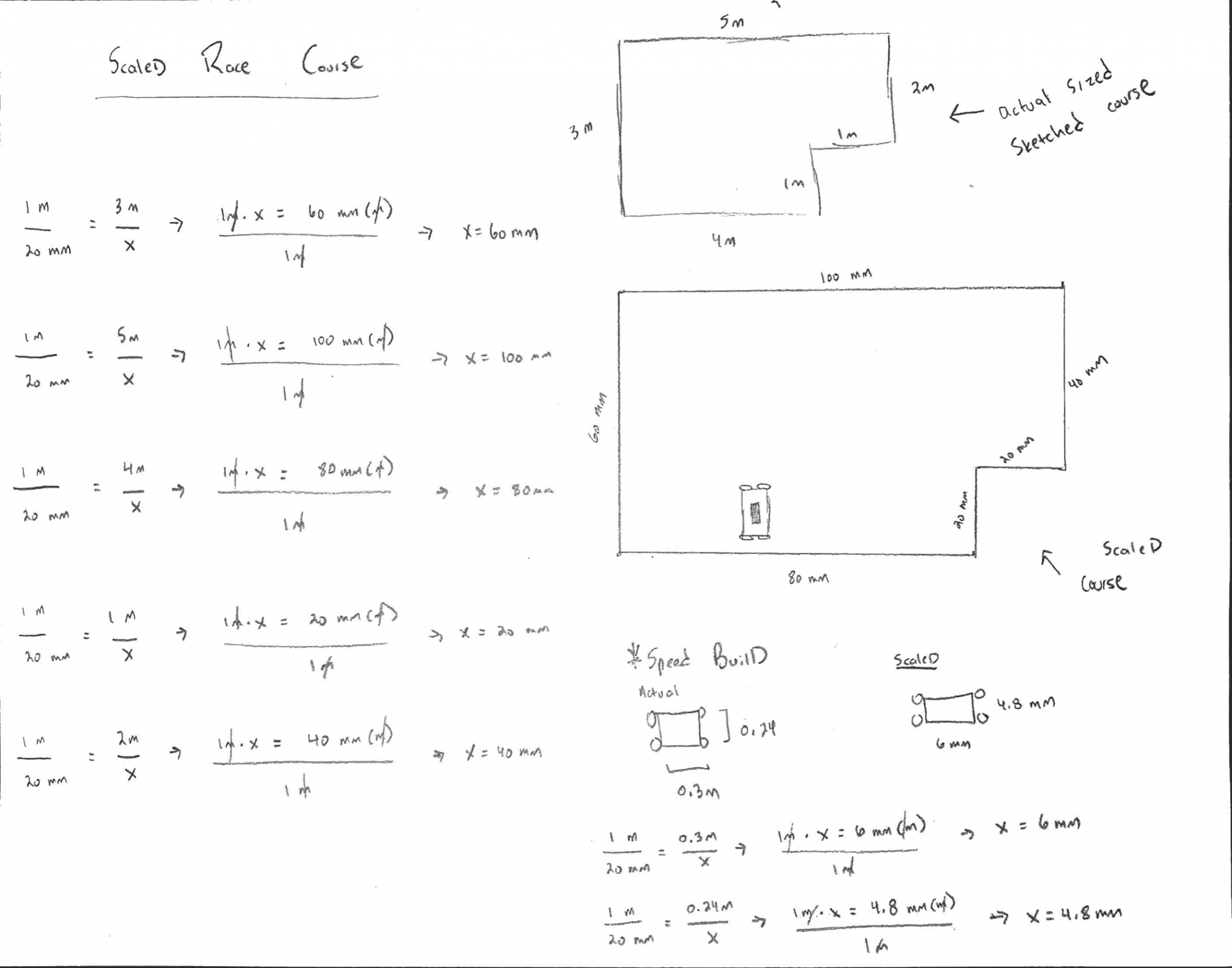
Nel tuo taccuino di ingegneria, crea una versione in scala dell'area che hai disegnato utilizzando le misurazioni registrate. Prima di iniziare, decidi la scala alla quale desideri ricreare l'area in metri. Ad esempio, 20 millimetri sullo schizzo potrebbero corrispondere a 1 metro nell'area che hai a disposizione per il tuo ippodromo, come nell'esempio sopra.
Dovresti considerare la dimensione del tuo schizzo quando scegli la scala. Una scala troppo grande potrebbe non adattarsi alla carta che stai utilizzando.
Aggiungi una versione in scala dello Speedbot VEX V5 al tuo schizzo per visualizzare le sue dimensioni in scala rispetto all'area in scala che hai creato.
Rispondi alle seguenti domande nel tuo quaderno di ingegneria:
-
Come hai determinato la scala da utilizzare nel tuo schizzo?
-
In che modo le dimensioni del tuo robot hanno influenzato la tua scala?
![]() Casella degli strumenti per l'insegnante
Casella degli strumenti per l'insegnante
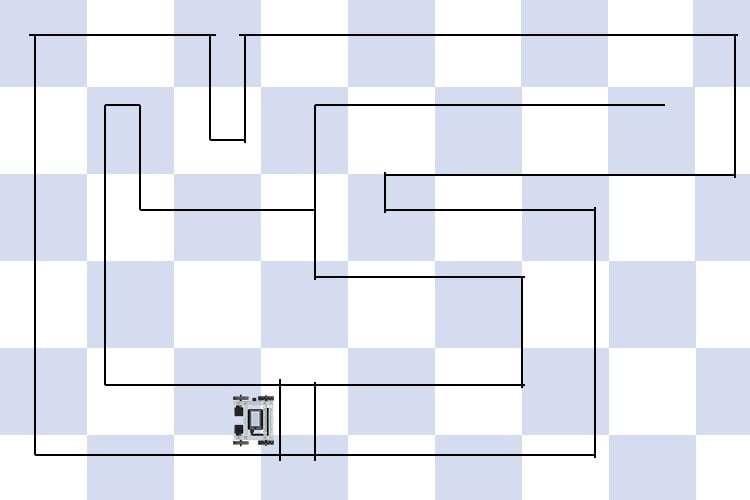
Puoi anche disegnare il percorso utilizzando la carta millimetrata:
Chiedi agli studenti di disegnare un ippodromo all'interno dell'area in scala che hanno realizzato nel loro quaderno di ingegneria. Tieni presente le dimensioni dello Speedbot VEX V5 e come è rappresentato nella scala utilizzata. Il robot dovrebbe essere in grado di percorrere il percorso senza lasciare i lati dell'ippodromo.
Cerca di essere il più creativo possibile con il percorso aggiungendo più curve e rettilinei. Utilizza frecce o altri simboli per indicare la direzione in cui dovrebbe viaggiare il robot sull'ippodromo. Inoltre, indicare la posizione delle linee di partenza e di arrivo utilizzando uno o più simboli.
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Chiedi ai tuoi studenti di aggiungere un simbolo o un disegno per lo Speedbot VEX V5 che sia in scala per aiutarli a capire se le dimensioni del loro corso possono ospitare i robot.
Passaggio 4: Progettare il tuo corso
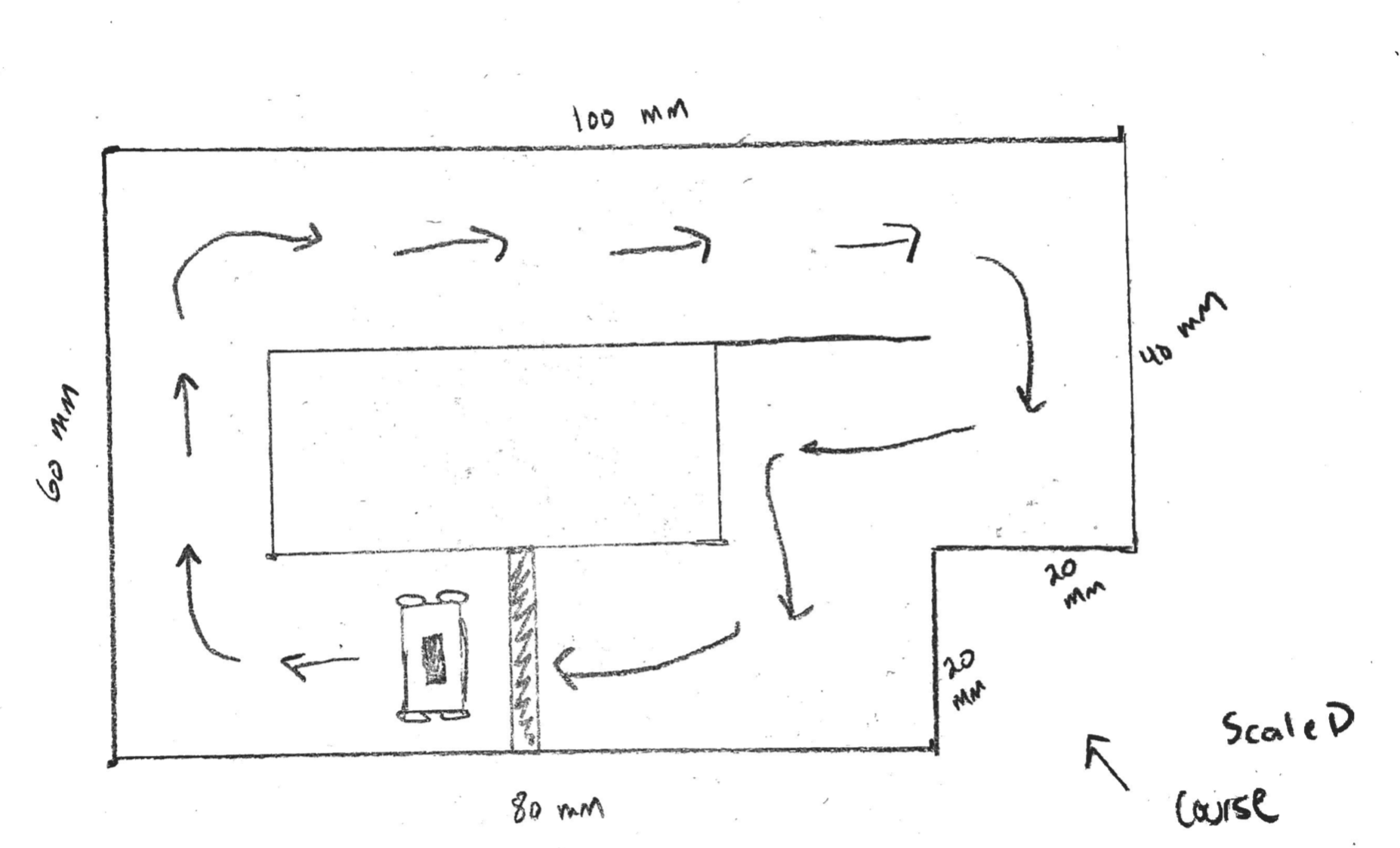
Disegna un ippodromo all'interno dell'area in scala che hai creato nel tuo taccuino di ingegneria. Tieni presente le dimensioni dello Speedbot VEX V5 e come è rappresentato nella scala che hai utilizzato. Il robot dovrebbe essere in grado di percorrere il percorso senza lasciare i lati dell'ippodromo.
Cerca di essere il più creativo possibile con il tuo percorso aggiungendo più curve e rettilinei. Utilizza frecce o altri simboli per indicare la direzione in cui dovrebbe viaggiare il robot sull'ippodromo. Inoltre, indicare la posizione delle linee di partenza e di arrivo utilizzando uno o più simboli.
Passaggio 5: Crea il tuo corso
Usando il nastro adesivo e lo schizzo in scala del tuo ippodromo, crea una versione a grandezza naturale del percorso nell'area che hai misurato originariamente. Presta molta attenzione alla scala che hai scelto per il tuo disegno e utilizza un metro o un righello per assicurarti che la versione a grandezza naturale del tuo corso corrisponda alle dimensioni della versione in scala che hai creato nel tuo taccuino di ingegneria.
Rispondi alle seguenti domande nel tuo quaderno di ingegneria:
-
Qual è stata la parte più difficile quando hai creato una versione a grandezza naturale del corso dalla tua versione in scala? Perché?
-
Quali strategie hai utilizzato per determinare se le tue misurazioni erano accurate? Come li hai inventati?
![]() Casella degli strumenti per l'insegnante
Casella degli strumenti per l'insegnante
È probabile che gli studenti riferiscano che la parte più difficile nella creazione di una versione a grandezza naturale del corso basata sulla versione in scala è la necessità di misurazioni precise. Questa esperienza dovrebbe evidenziare gli errori umani nell’effettuare misurazioni, soprattutto quando una misurazione viene eseguita una sola volta. Ai fini della pianificazione, un modo per ridurre gli errori di misurazione è misurare più di una volta e calcolare la media delle misurazioni effettuate tra questi molteplici tentativi. In questo modo le misurazioni più lunga e più breve, che potrebbero essere entrambe imprecise, vengono regolate su un valore più probabilmente accurato.
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Dare agli studenti il tempo di:
-
Metti alla prova il loro ippodromo
-
Prendere nota delle modifiche necessarie alle dimensioni/dimensioni
-
Apporta queste modifiche disegnando e ridimensionando
-
Ritestare.
Passaggio 6: Metti alla prova il tuo corso

È ora di testare il corso! Le misurazioni in scala sull'Ippodromo funzionano? Scopriamolo!
Seguire la seguente procedura:
1. Assicurarsi che sia il cervello del robot che il controller siano accesi.
2. Associa il controller V5 al cervello del robot V5.
Posiziona il tuo Speedbot sulla linea di partenza del tuo Ippodromo.
4. Scopri come guidare il robot utilizzando il controller.
5. Esegui il programma Drive per guidare lo Speedbot attraverso l'ippodromo.
6. Prendi nota di tutti i luoghi dell'Ippodromo che dovrebbero essere modificati in base alle dimensioni nel tuo taccuino di ingegneria.
7. Dopo aver guidato il robot attorno all'Ippodromo alcune volte per testare le dimensioni, disegna nuovamente l'Ippodromo con le dimensioni migliorate.
8. Ridimensiona l'ippodromo, documenta le modifiche apportate e il motivo nel tuo taccuino di ingegneria e testalo di nuovo!
![]() Strumenti dell'insegnante
-
Fermati e discuti
Strumenti dell'insegnante
-
Fermati e discuti
Dopo che gli studenti hanno testato i loro ippodromi e apportato i miglioramenti necessari, coinvolgeteli in una discussione in classe. Per prima cosa chiedi agli studenti di condividere le loro esperienze con un partner o un piccolo gruppo prima di chiedere agli studenti di impegnarsi in una discussione con l'intera classe.
Facilitare la discussione chiedendo:
-
Quali parti del progetto originale del tuo ippodromo sono state dimensionate correttamente? Quali parti necessitavano di essere ridimensionate e perché?
-
In che modo il ridimensionamento del tuo Ippodromo ti ha permesso di apportare modifiche alle dimensioni più facilmente?
-
Avere le dimensioni in scala dello Speedbot disegnate sulla versione in scala del tuo Ippodromo ti ha aiutato a decidere come dovrebbe muoversi il robot? Perché o perché no?
-
Se dovessi ripetere questa attività, c'è qualcosa che avresti fatto diversamente?