
![]() 教師用ツールボックス
-
この読書の目的
教師用ツールボックス
-
この読書の目的
この STEM ラボは、ロボットが検出した条件に応答するようにロボットをプログラミングすることに焦点を当てています。 この最初の資料は、条件文、ブール (TRUE または FALSE) 条件の考え方、およびこれらのプログラミング構造をプロジェクト内に含めることの利点を紹介することを目的としています。 学生は、条件付きプログラミングを組み込むことでロボットの環境への反応が改善されることを認識し始める必要があります。
ロボットを見ていると、ロボット自身の動作を決定しているように見えますが、プログラミングの中で条件を確認し、適切な動作を実行しています。 生徒たちは、状況が情報に基づいた自分自身の決定にどのような影響を与えるかを考えることができました。
決断すべきこと: 傘を持っていくべきですか?
現在の状況: 雨が降りそうです(TRUE)。
決断: 傘を持ってください。

意思決定
最も基本的なレベルでは、プログラムは単純な一連の動作を実行するように作成されます。 たとえば、ロボットを前進させ、目的地に到達するためにいくつか回転させたい場合があります。 しかし、ロボットが前進を開始してルートを完了する適切なタイミングを待機させたい場合はどうすればよいでしょうか? そのためには、条件文を使用したプログラミングが必要になります。 条件ステートメントを使用して、プロジェクト内で「開始する適切な時期」を定義します。 おそらく「適切なタイミング」とは、ボタンが押された後、またはセンサーが特定のレベルを検出して運転を開始したときです。 ロボットの動作を見ていると、ロボットが運転を開始するタイミングを決めているように見えますが、それは運転を開始する条件を設定しているためです。
条件ステートメントは、ブール値 (TRUE または FALSE) 条件を使用する強力なプログラミング ステートメントで、ロボットが感知した内容に応じて異なる動作をするプロジェクトを開発できます。
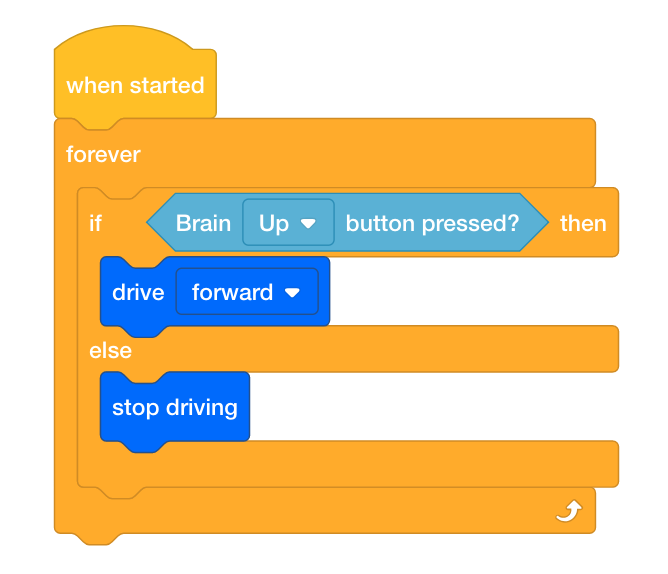
次の例では、Brain Up ボタンが押されると (TRUE)、ロボットは前進します。 Brain Up ボタンが押されていない場合 (FALSE)、ロボットは運転を停止します。 これは、Brain Up ボタンが押された場合にのみロボットが前進し、そうでない場合はロボットが停止することを示しています。
![]() 学習の幅を広げる
学習の幅を広げる
このアクティビティを拡張するには、生徒にチームを組んで、別のチームが完成できるように迷路のスケッチを作成してもらいます。 迷路には少なくとも 3 ~ 5 つの条件ステートメントが必要です。 たとえば、壁があるまで前進し続けます。 次に、左折します。 生徒は迷路の解決策をフローチャート形式で書く必要があります。 次に、学生は別のチームと迷路を交換し、そのチームがフローチャート形式で迷路の解決策を作成する必要があります。 次に、2 つのチームは答えを比較して、どれだけ一致しているかを確認します。
このアクティビティをオンライン ゲームやモバイル ゲームに関連付けるには、生徒にお気に入りのゲームやアプリの目標について説明してもらいます。 次に、生徒たちに、ゲーム内で従う最初の 10 個の「はい/いいえ」または「真/偽」の決定を概説するフローチャートを作成してもらいます。