
![]() 교사 도구 상자
-
이 읽기의 목적
교사 도구 상자
-
이 읽기의 목적
이 STEM 연구실은 로봇이 감지한 조건에 반응하도록 프로그래밍하는 데 중점을 둡니다. 이 첫 번째 자료는 조건부, 부울(TRUE 또는 FALSE) 조건에 대한 아이디어와 프로젝트 내에 이러한 프로그래밍 구조를 포함함으로써 얻을 수 있는 이점을 소개하기 위한 것입니다. 학생들은 조건부 프로그래밍을 포함하면 로봇이 환경에 반응하는 방식이 향상된다는 점을 인식하기 시작해야 합니다.
로봇을 관찰하면서 스스로 행동을 결정하는 것처럼 보이지만 프로그래밍 내에서는 상태를 확인하고 적절한 조치를 취하는 것입니다. 학생들은 상황이 자신의 정보에 입각한 결정에 어떻게 영향을 미치는지 고려할 수 있습니다.
내려야 할 결정: 우산을 가져갈까?
현재 상태: 비가 올 가능성이 있습니다(TRUE).
결정: 우산을 가져가세요.

의사결정
가장 기본적인 수준에서 프로그램은 간단한 동작 시퀀스를 수행하도록 작성됩니다. 예를 들어, 로봇이 앞으로 나아가고 목적지에 도달하기 위해 몇 차례 회전하기를 원할 수 있습니다. 하지만 로봇이 전진을 시작하고 경로를 완료할 적절한 시간을 기다리도록 하려면 어떻게 해야 할까요? 이를 위해서는 조건문을 사용한 프로그래밍이 필요합니다. 조건문을 사용하여 프로젝트 내에서 "시작하기에 적합한 시간"을 정의합니다. 아마도 "적절한 시간"은 버튼을 누른 후 또는 센서가 특정 수준을 감지한 후 운전을 시작하는 때일 수 있습니다. 로봇의 행동을 보면 로봇이 운전을 시작할 때를 결정하는 것처럼 보이지만, 운전을 시작할 때의 조건을 사용자가 설정하기 때문입니다.
조건문은 부울(TRUE 또는 FALSE) 조건을 사용하고 로봇이 감지하는 내용에 따라 다르게 동작하도록 하는 프로젝트를 개발할 수 있게 해주는 강력한 프로그래밍 문입니다.
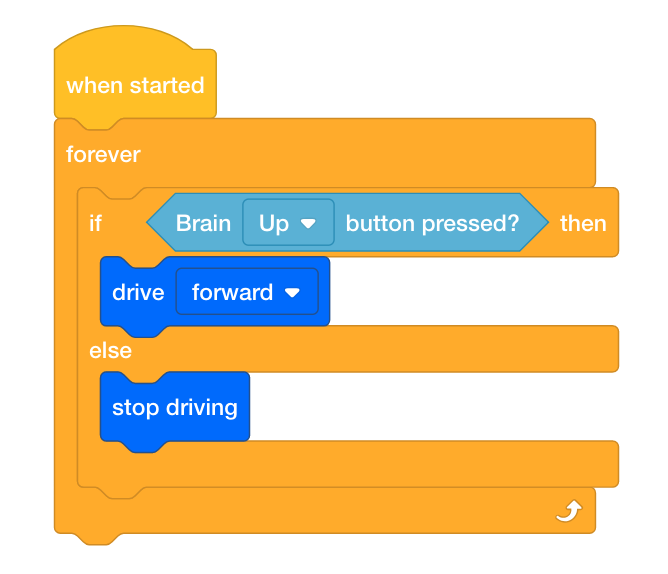
다음 예에서 Brain Up 버튼을 누르면(TRUE) 로봇이 앞으로 주행합니다. Brain Up 버튼을 누르지 않으면(FALSE) 로봇은 운전을 멈춥니다. 이는 Brain Up 버튼을 눌렀을 때만 로봇이 전진하고, 그렇지 않으면 로봇이 멈추는 것을 보여줍니다.
![]() 학습을 확장하세요
학습을 확장하세요
이 활동을 확장하려면 학생들에게 팀을 구성하고 다른 팀이 완료할 미로의 스케치를 만들도록 요청하세요. 미로에는 최소 3~5개의 조건문이 필요합니다. 예를 들어, 벽이 나타날 때까지 계속 전진하세요. 그런 다음 좌회전하세요. 학생들은 순서도 형식으로 미로에 대한 해결책을 작성해야 합니다. 그런 다음 학생들은 순서도 형식으로 미로에 대한 솔루션을 만들어야 하는 다른 팀과 미로를 교환해야 합니다. 그런 다음 두 팀은 답변을 비교하여 얼마나 일치하는지 확인해야 합니다.
이 활동을 온라인 또는 모바일 게임과 연관시키려면 학생들에게 자신이 좋아하는 게임/앱의 목표를 설명하도록 요청하세요. 그런 다음 학생들에게 게임에서 따라야 할 처음 10개의 예/아니요 또는 참/거짓 결정을 설명하는 순서도를 만들도록 하십시오.