
സ്ട്രൈക്ക് ചലഞ്ച് - സി++
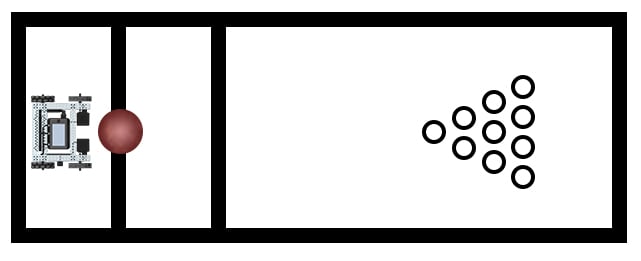 സ്ട്രൈക്ക്ഫീൽഡിന്റെ ലേഔട്ട്
സ്ട്രൈക്ക്ഫീൽഡിന്റെ ലേഔട്ട് സ്ട്രൈക്ക് ചലഞ്ച്
ഈ വെല്ലുവിളിയിൽ, ബൗളിംഗിൽ മത്സരിക്കുമ്പോൾ ഒരു പന്തിലേക്ക് ഊർജ്ജം കൈമാറാൻ നിങ്ങളുടെ റോബോട്ടിനെ പ്രോഗ്രാം ചെയ്യും!
വെല്ലുവിളി നിയമങ്ങൾ:
- റോബോട്ട് സ്റ്റാർട്ട് സോണിൽ നിന്നാണ് തുടങ്ങേണ്ടത്.
- ബോൾ പ്ലേസ്മെന്റ് ലൈനിൽ എവിടെ വേണമെങ്കിലും പന്ത് ആരംഭിക്കണം.
- പന്ത് ഇങ്ങനെയാണെങ്കിൽ മാത്രമേ റോബോട്ടിന് പന്ത് തൊടാൻ കഴിയൂ:
- ബോൾ പ്ലേസ്മെന്റ് ലൈനിൽ
- കൂട്ടിയിടി മേഖലയിൽ
- ഓരോ ഗെയിമിലും 10 ഫ്രെയിമുകൾ അടങ്ങിയിരിക്കുന്നു കൂടാതെ സ്റ്റാൻഡേർഡ് ബൗളിംഗ് നിയമങ്ങൾ പാലിക്കുന്നു (Google / .docx / .pdf).
- 10 ഫ്രെയിമുകളുടെ അവസാനം ഏറ്റവും കൂടുതൽ പോയിന്റുകൾ നേടുന്ന വ്യക്തി അല്ലെങ്കിൽ ടീം വിജയിക്കുന്നു!
- തമാശയുള്ള!
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
ഈ പ്രവർത്തനത്തിനായി ഒരു പശ്ചാത്തല കഥയോ ഉദ്ദേശ്യമോ തയ്യാറാക്കി സർഗ്ഗാത്മകത പുലർത്തുകയും ഇടപഴകൽ വർദ്ധിപ്പിക്കുകയും ചെയ്യുക! ഒളിമ്പിക് കായിക ഇനമായി ബൗളിംഗിനെ ഉൾപ്പെടുത്തുന്നത് നിലവിൽ പരിഗണനയിലാണ്. വിദ്യാർത്ഥികൾ ഒരു ഒളിമ്പിക് ടീമിന്റെ ഭാഗമാകാൻ തയ്യാറെടുക്കുകയാണോ, ദേശീയ ബൗളിംഗ് മത്സരത്തിനായി പരിശീലിക്കുകയാണോ, അതോ ഒരു കൊളീജിയറ്റ് ബൗളിംഗ് സ്കോളർഷിപ്പിന് അപേക്ഷിക്കാൻ ആഗ്രഹിക്കുന്നുണ്ടോ?
ഓപ്ഷണൽ സ്ട്രൈക്ക് ചലഞ്ച് സ്കോർ ഷീറ്റിനായി ഇവിടെ ക്ലിക്ക് ചെയ്യുക (Google /.pdf).
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
വേഗത സെറ്റ് അനുസരിച്ച് പരിഹാരങ്ങൾ വ്യത്യാസപ്പെടും. പന്ത് കൂടുതൽ ശക്തമായി തള്ളുന്നതിന് ഉയർന്ന വേഗത തിരഞ്ഞെടുക്കുന്നതിലും നിയന്ത്രണം നഷ്ടപ്പെടാതിരിക്കുന്നതിലും വിദ്യാർത്ഥികൾ സന്തുലിതാവസ്ഥ കണ്ടെത്തേണ്ടതുണ്ട്.
താഴെയുള്ള സാമ്പിൾ പരിഹാരങ്ങൾ കാണുക:
int main() {
// റോബോട്ട് കോൺഫിഗറേഷൻ ആരംഭിക്കുന്നു. നീക്കം ചെയ്യരുത്!
vexcodeInit();
// പ്രോജക്റ്റ് കോഡ് ആരംഭിക്കുക
// ഡ്രൈവ് വേഗത 50% ആയി സജ്ജമാക്കുക
Drivetrain.setDriveVelocity(50, ശതമാനം);
// 50cm മുന്നോട്ട് ഡ്രൈവ് ചെയ്യുക
Drivetrain.driveFor(forward, 500, mm);
}