
Kasteel Crasher
6 Lessen
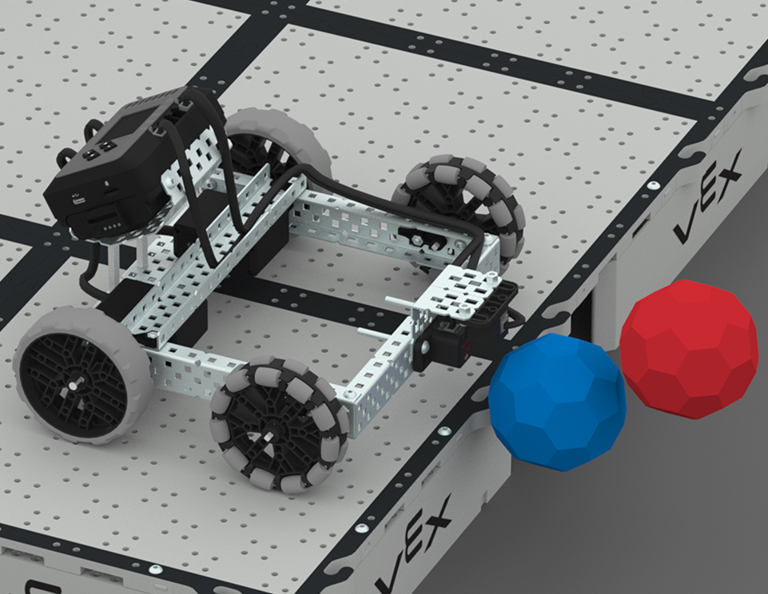
In deze unit ontdek je hoe je de optische en afstandssensoren kunt gebruiken om Buckyball-kastelen te zoeken, te laten crashen en te ontruimen. Zo scoor je punten in de Castle Crasher-competitie!
Bezoek het docentenportaal voor ondersteuningsmateriaal voor docenten en video's over de inhoud en het faciliteren van de Castle Crasher-lessen.
Les 1: Inleiding
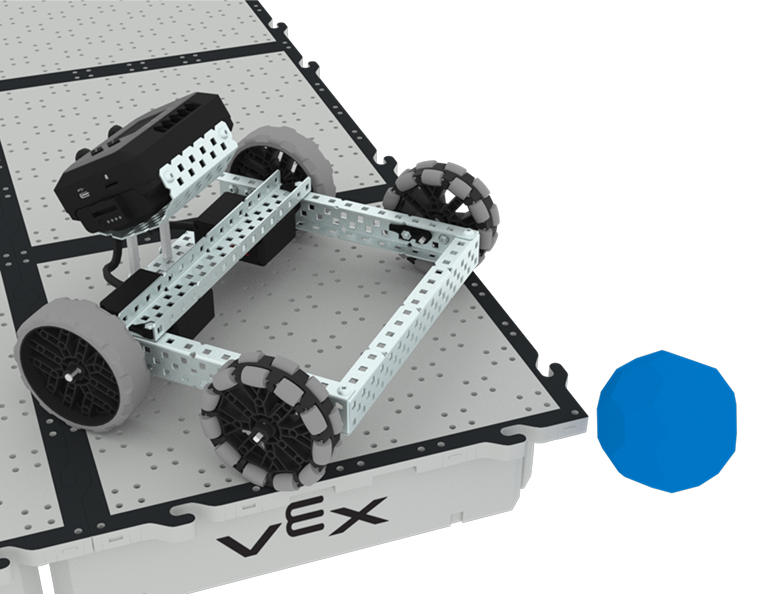
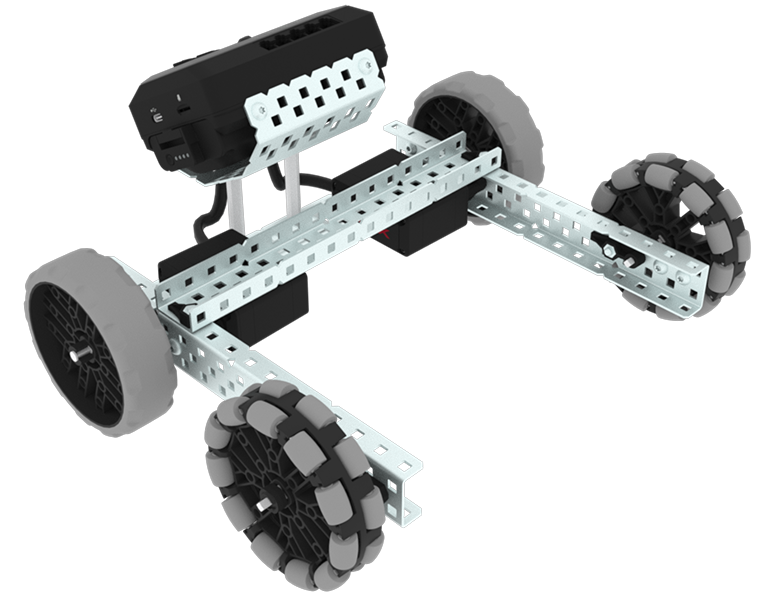
In deze les maak je kennis met de Castle Crasher-competitie, bouw je de BaseBot en word je klaargemaakt om te coderen.
Les 2: Castle Crasher Geen sensoren
In deze les leert u hoe u hoeken kunt berekenen en de snelheid van uw robot kunt veranderen, zodat u kunt deelnemen aan de Buckyball Blitz Challenge.
Les 3: Castle Crasher + Afstandssensor
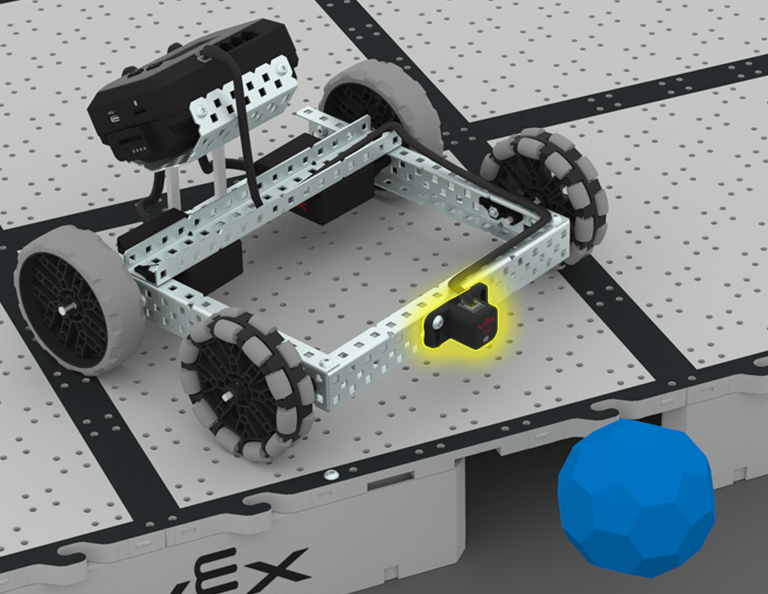
In deze les leert u wat een afstandssensor is en hoe u deze op uw robot kunt gebruiken. U leert ook over het [Wacht tot]-blok en hoe u dit kunt gebruiken in een VEXcode EXP-project. Vervolgens ga je wat je hebt geleerd toepassen om deel te nemen aan de Sense and Sweep Challenge!
Les 4: Algoritmen creëren
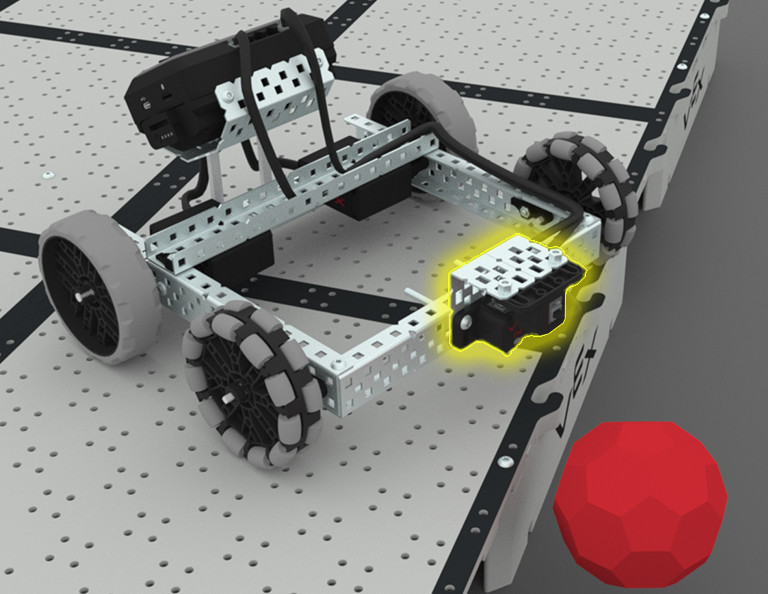
In deze les leert u over de optische sensor en hoe u een algoritme kunt maken dat gebruikmaakt van sensorfeedback. Vervolgens programmeer je je robot zo dat hij zelfstandig Buckyballs kan vinden en ze van het veld kan duwen in de Sweep the Field Challenge.
Les 5: Castle Crasher-competitie
In deze les ga je de kennis uit de vorige lessen toepassen om deel te nemen aan een Castle Crasher-wedstrijd!

Les 6: Conclusie
In deze les reflecteert u op de module en identificeert u verbanden tussen wat u hebt gedaan en een STEM-carrière.