
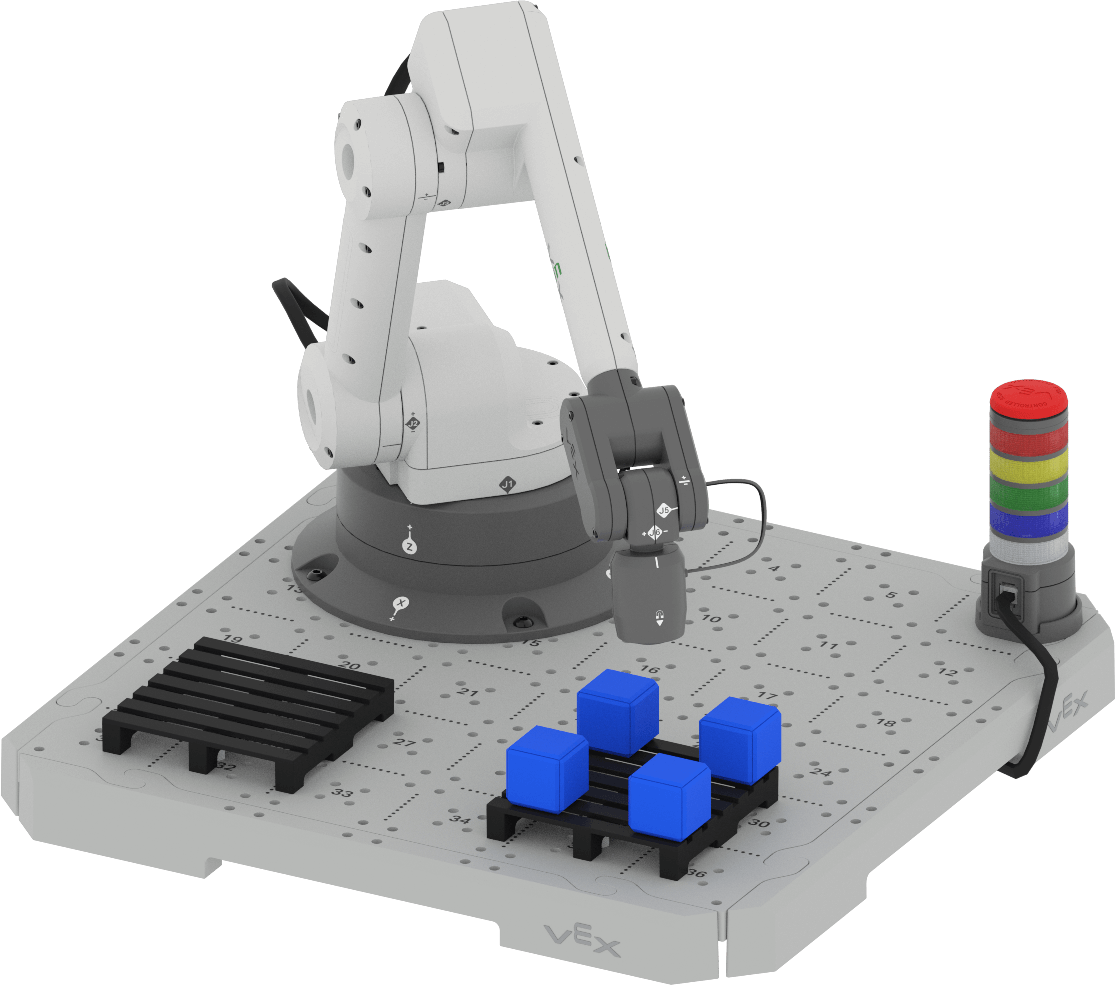
ในบทเรียนก่อนหน้านี้คุณได้เรียนรู้วิธีเขียนรหัสแขน 6 แกนเพื่อหยิบและวางลูกบาศก์บนพาเลท ในบทเรียนนี้คุณจะต่อยอดจากสิ่งที่คุณได้เรียนรู้ในการย้ายลูกบาศก์หลายก้อนไปยังพาเลท คุณจะได้เรียนรู้วิธีการ:
- วางแผนสถานที่ส่งของคิวบ์ที่คุณจะวางบนพาเลท
- เขียนรหัสแขน 6 แกนเพื่อย้ายลูกบาศก์สองก้อนไปยังพาเลทสำเร็จ
ในตอนท้ายของบทเรียนคุณจะสร้างโปรเจกต์ของคุณเพื่อหยิบและวางสี่ลูกบาศก์บนพาเลทในกิจกรรม
กำลังคิดเกี่ยวกับการวางตำแหน่งบนพาเลท
ในบทเรียนก่อนหน้านี้คุณได้ย้ายลูกบาศก์หนึ่งอันไปยังพาเลทและวางไว้ตรงกลาง หนึ่งในข้อดีของการจัดส่งสินค้าจำนวนมากโดยใช้พาเลทคือวัตถุจำนวนมากสามารถขนส่งได้ในครั้งเดียว เพื่อให้สามารถทำสิ่งนี้ได้อย่างมีประสิทธิภาพวัตถุเหล่านั้นจะต้องได้รับการจัดเรียงอย่างมีประสิทธิภาพเพื่อให้บริษัทต่างๆสามารถบรรจุลงในพาเลทแต่ละอันที่จัดส่งได้มากขึ้น
พาเลทจะเป็นวิธีที่ไม่มีประสิทธิภาพและมีราคาแพงในการเคลื่อนย้ายวัตถุขนาดเล็กหนึ่งหรือสองชิ้นเช่นสถานการณ์การวางลูกบาศก์หนึ่งอันไว้ตรงกลางของพาเลท
อย่างไรก็ตามการวางลูกบาศก์บนพาเลทมากขึ้นทำให้การจัดส่งมีประสิทธิภาพและคุ้มค่ามากขึ้น 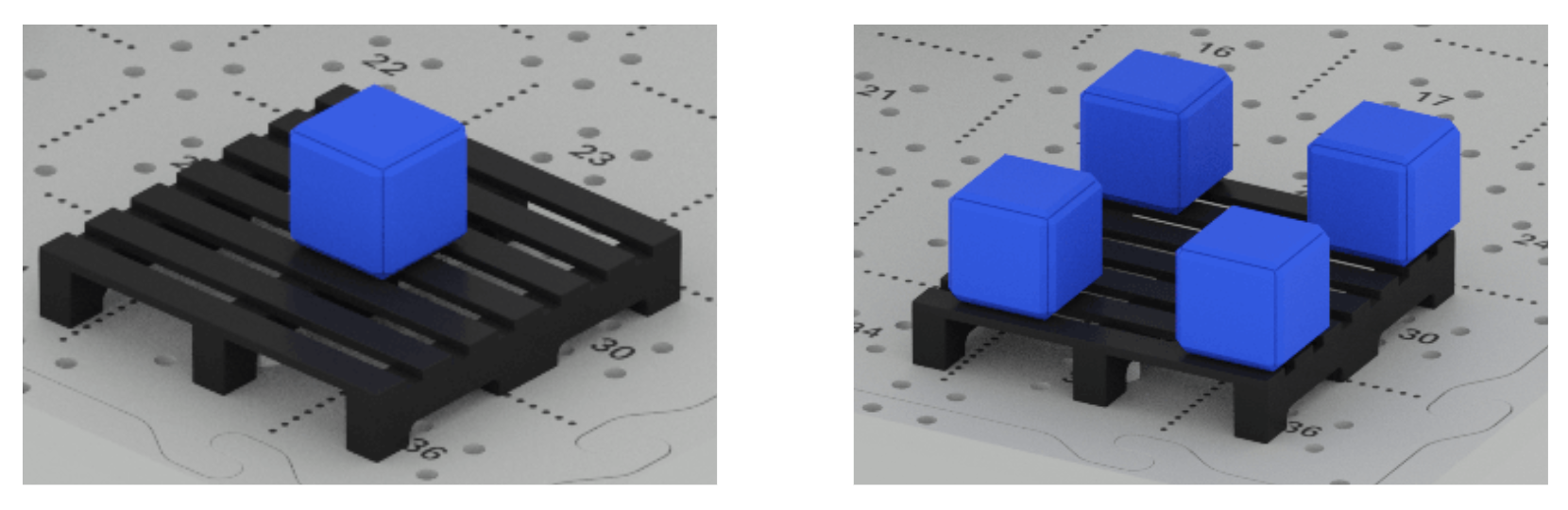
ในการทำเช่นนี้เราจะต้องคิดว่าลูกบาศก์แต่ละก้อนจะถูกวางไว้บนพาเลทที่ไหน ตลอดบทเรียนนี้ท่านจะได้เรียนรู้เกี่ยวกับวิธีการเขียนรหัสแขน 6 แกนเพื่อย้ายลูกบาศก์หลายก้อนและวางไว้บนพาเลทด้วยกันอย่างมีประสิทธิภาพ
วางลูกบาศก์แรก
โปรเจกต์ของคุณจากบทเรียนที่ 2 ย้ายลูกบาศก์หนึ่งอันไปยัง ศูนย์กลาง ของพาเลท ขั้นตอนแรกในการวางลูกบาศก์หลายก้อนคือการปรับตำแหน่งวางสำหรับลูกบาศก์แรก – วางไว้ที่ มุม ของพาเลท
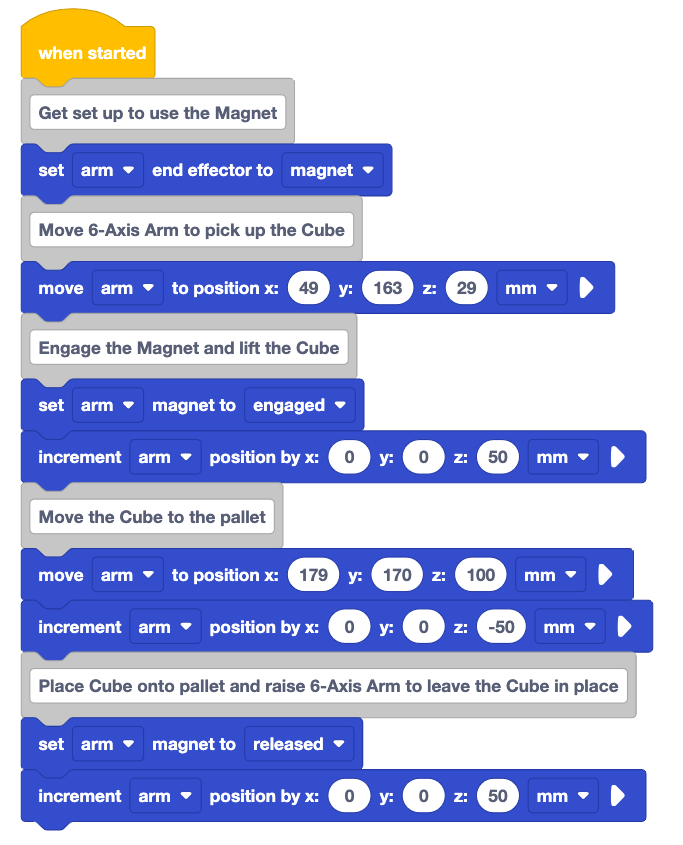
เปิดโปรเจกต์ของคุณจากบทเรียนที่ 2 ใน VEXcode EXP.
เปลี่ยนชื่อโปรเจกต์เป็น หน่วยที่ 7 บทเรียนที่ 3 และบันทึกลงในอุปกรณ์ของคุณ
วางลูกบาศก์ที่มุมของพาเลท
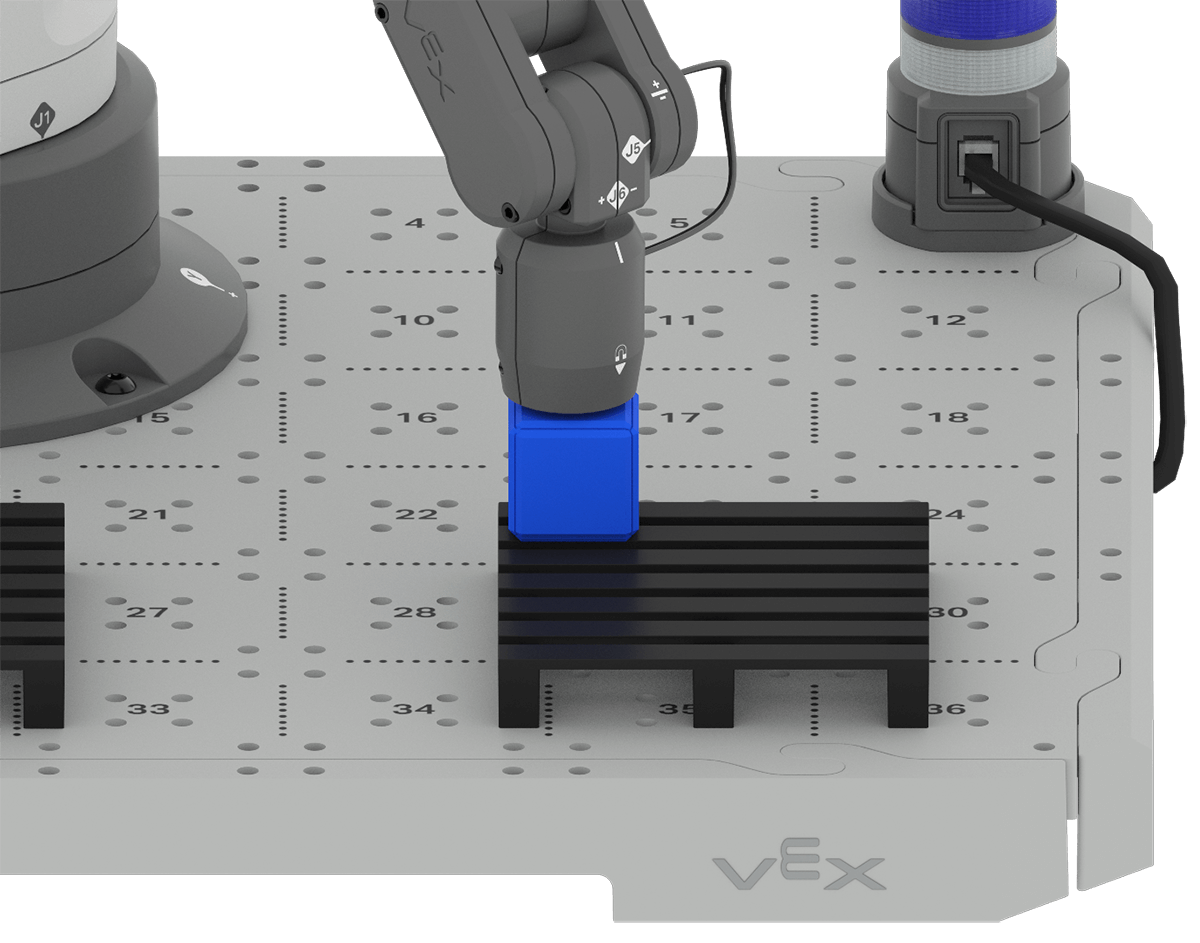
ขยับแขน 6 แกนด้วยตนเองเพื่อให้แม่เหล็กสัมผัสกับด้านบนของลูกบาศก์
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode แล้ว
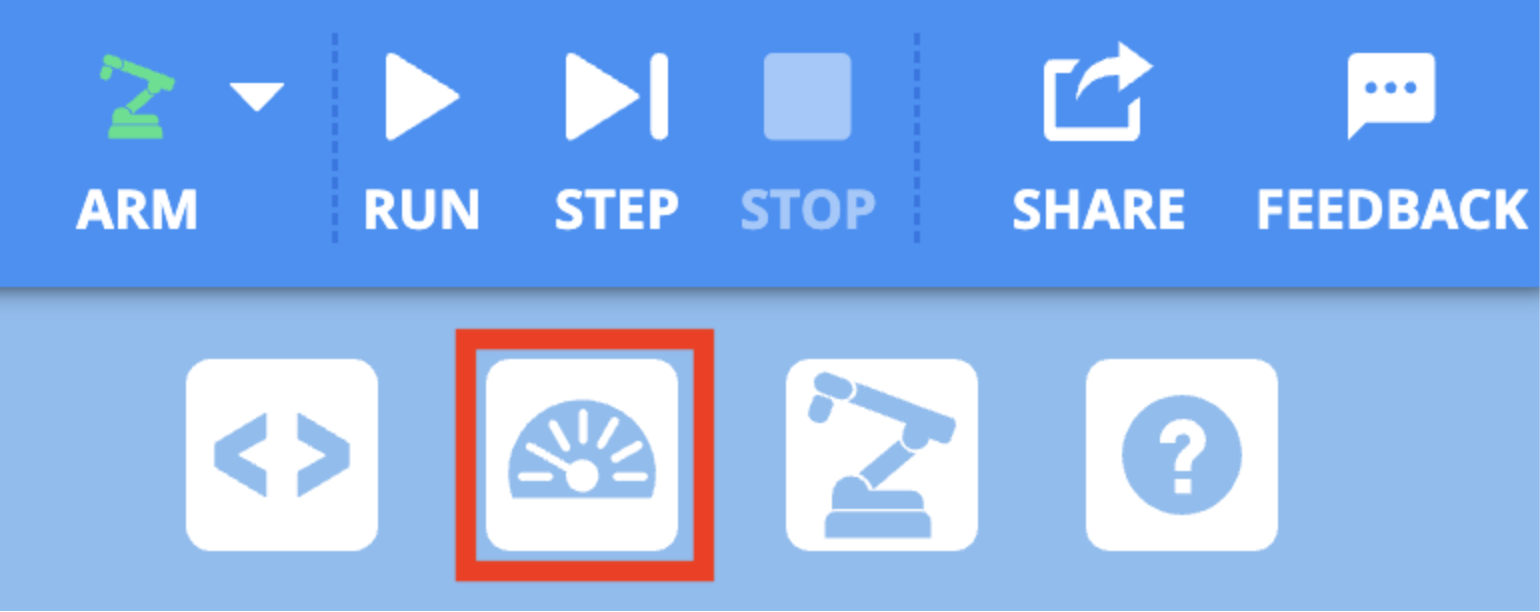
เลือกไอคอนจอภาพในแถบเครื่องมือเพื่อเปิดจอภาพ
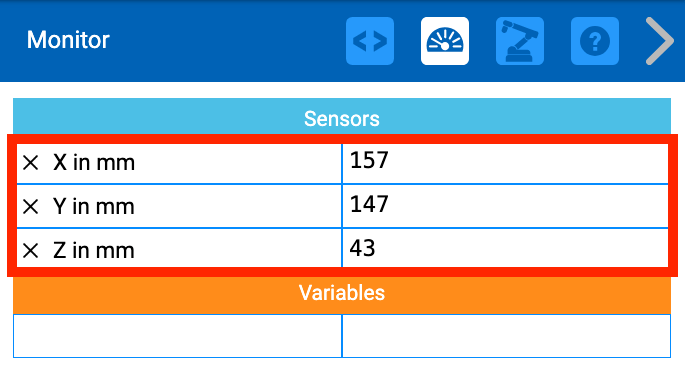
บันทึกพิกัด x และ y จากคอนโซลมอนิเตอร์ในสมุดบันทึกวิศวกรรมของคุณ นี่จะเป็นพิกัด x และ y ของจุดส่งสำหรับคิวบ์
โปรดจำไว้ว่าแขน 6 แกนจะเคลื่อนที่เหนือตำแหน่งวางก่อนที่จะเคลื่อนลูกบาศก์ลงไปที่พาเลท ซึ่งหมายความว่าคุณไม่จำเป็นต้องบันทึกค่า z
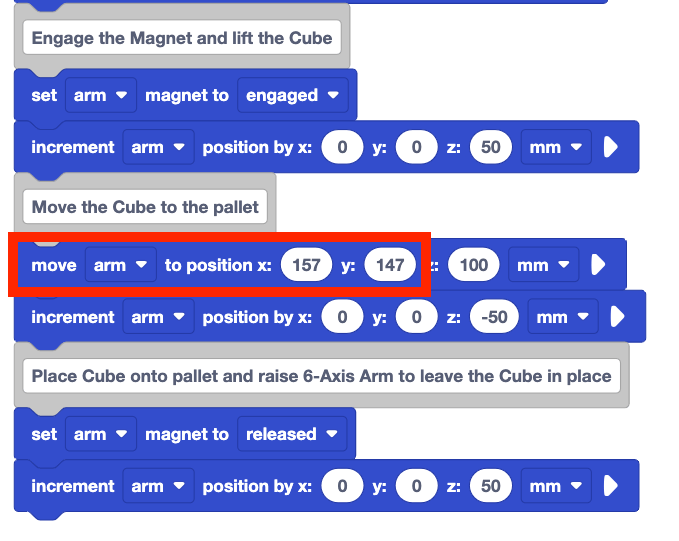
ป้อนพิกัด x และ y ของสถานที่ส่งใหม่ลงในโครงการของคุณ พิกัด z ควรยังคงเหมือนเดิมเพื่อให้แกนแขน 6 แกนอยู่เหนือจุดส่ง
อย่าลืมใช้ พิกัด ของคุณเพราะตัวอย่างที่แสดงในที่นี้อาจแตกต่างจากพิกัดที่คุณบันทึกไว้
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode และ Cube อยู่ในโซนโหลด
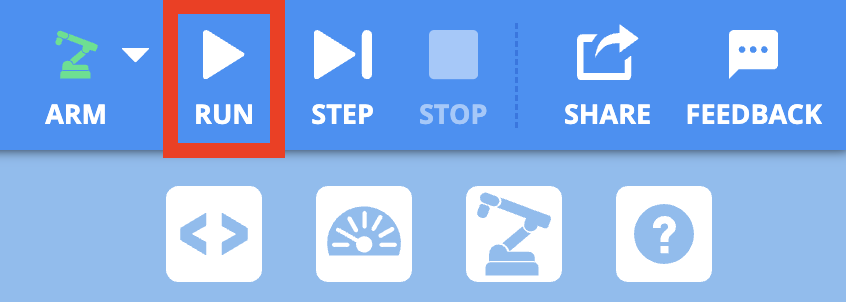
เรียกใช้โปรเจกต์เพื่อทดสอบ สังเกตพฤติกรรมของแขน 6 แกน มันหยิบลูกบาศก์ขึ้นมาและวางไว้ที่มุมของพาเลทตามที่ตั้งใจไว้หรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
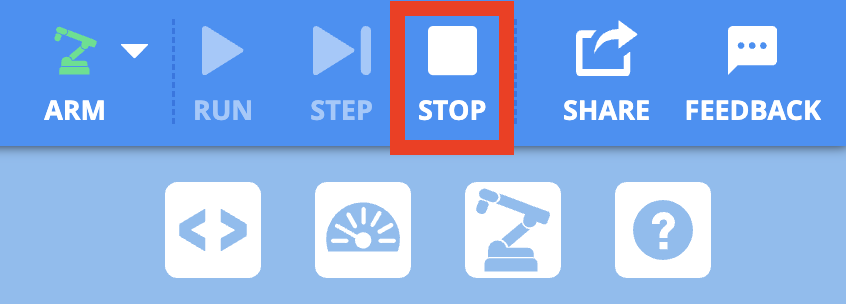
หยุดโครงการเมื่อแขน 6 แกนหยุดเคลื่อนที่ บันทึกการสังเกตของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
การย้ายลูกบาศก์ที่สอง
ตอนนี้ลูกบาศก์แรกอยู่ในสถานที่ส่งใหม่มีที่ว่างบนพาเลทเพื่อวางลูกบาศก์เพิ่มเติม
พฤติกรรมเดียวกันกับที่ใช้ในการย้ายลูกบาศก์แรกจะถูกทำซ้ำเพื่อย้ายหนึ่งวินาที แขน 6
แกนจะต้องย้ายไปยังจุดรับเดียวกันเชื่อมต่อแม่เหล็กย้ายลูกบาศก์ไปยังพาเลทและปล่อยลูกบาศก์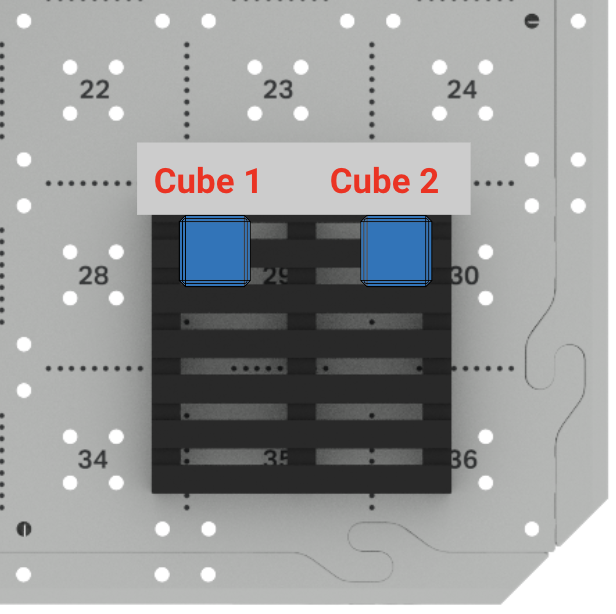
มีกลยุทธ์การเขียนโค้ดหลายวิธีที่คุณสามารถพยายามช่วยให้ทั้งสองลูกบาศก์ประสบความสำเร็จ
การเพิ่มบล็อกการทำซ้ำ
เมื่อรู้ว่าจะมีการทำซ้ำลำดับพฤติกรรมกลยุทธ์แรกที่ต้องลองคือการใช้ บล็อกการ ทำซ้ำ ดังที่คุณได้เรียนรู้ในหน่วยก่อนหน้า บล็อกการ ทำซ้ำมีประโยชน์สำหรับการทำซ้ำบล็อกหรือกองบล็อกในโครงการ
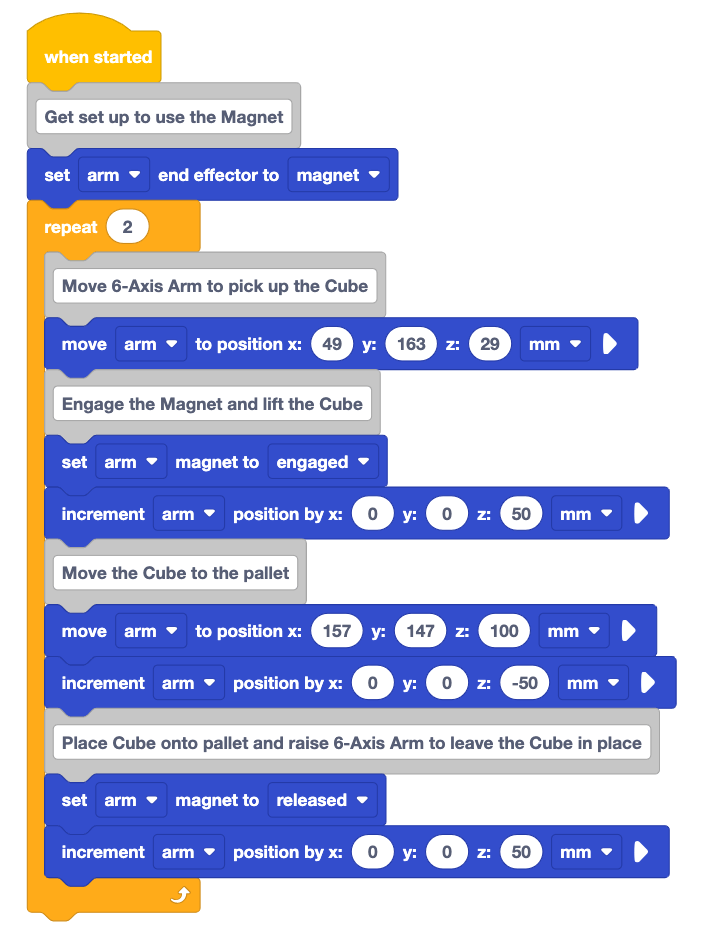
เพิ่ม บล็อกการ ทำซ้ำไปยังโปรเจกต์ของคุณใต้ ตั้งค่า บล็อกเอฟเฟคเตอร์สิ้นสุดดังที่แสดงไว้ที่นี่
ลาก ย้ายคิวบ์ไปยัง บล็อก ความคิดเห็นของพาเลทลงในบล็อกการ ทำซ้ำดังที่แสดงที่นี่ สิ่งนี้จะลากบล็อกที่ตามมาทั้งหมดลงใน บล็อกการ ทำซ้ำเช่นกัน
ตอนนี้บล็อกทั้งหมดที่จำเป็นในการหยิบและวางคิวบ์จากจุดรับไปยังมุมของพาเลทสามารถทำซ้ำได้
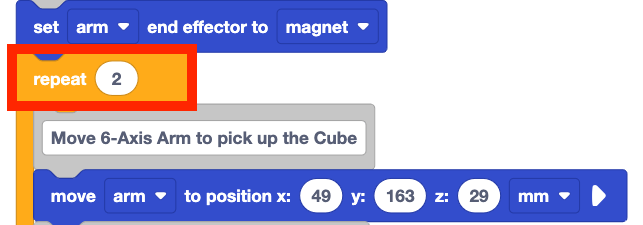
ตั้งค่าพารามิเตอร์ใน บล็อกการ ทำซ้ำเป็น 2
เนื่องจากคุณกำลังพยายามย้ายลูกบาศก์สองก้อนไปยังพาเลทพฤติกรรมจะถูกทำซ้ำสองครั้ง
อ่านรหัสที่คุณสร้างขึ้นและคาดการณ์ว่าแขน 6 แกนจะทำอะไรเมื่อเรียกใช้โปรเจกต์
บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณ ท่านอาจต้องการร่างเส้นทางของแขน 6 แกนหรือวาดตำแหน่งที่จะวางลูกบาศก์บนพาเลท
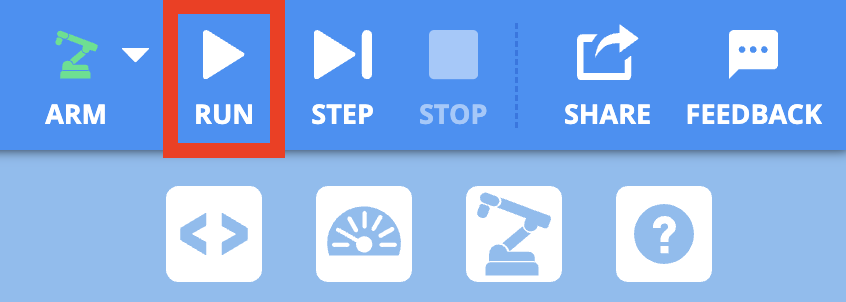
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode แล้ว
เรียกใช้โปรเจกต์เพื่อทดสอบ สังเกตพฤติกรรมของแขน 6 แกนเมื่อดำเนินโครงการ

หยุดโครงการเมื่อแขน 6 แกนเคลื่อนที่เสร็จสิ้น บันทึกการสังเกตของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
แขน 6 แกนย้ายลูกบาศก์ทั้งสองไปยังพาเลทสำเร็จหรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
สิ่งนี้ไม่ได้ย้ายลูกบาศก์ที่สองตามที่ตั้งใจไว้และทำให้เกิดข้อผิดพลาด เนื่องจากลูกบาศก์แรกถูกวางไว้ในตำแหน่งนั้นจึงไม่สามารถวางลูกบาศก์ที่สองไว้ในตำแหน่งเดียวกันได้ แขน 6 แกนไม่สามารถไปถึงตำแหน่งได้จึงเกิดข้อผิดพลาดขึ้น
ในการวางลูกบาศก์ที่สองบนพาเลทเราจะต้องเลื่อนลูกบาศก์นี้ไปยังตำแหน่งเปิดบนพาเลท
ย้ายลูกบาศก์ที่สองที่สัมพันธ์กับลูกบาศก์แรก
การทราบตำแหน่งของลูกบาศก์แรกบนพาเลทหมายความว่าสามารถวางลูกบาศก์ถัดไปให้สัมพันธ์กับลูกบาศก์แรกได้ คุณได้เรียนรู้เกี่ยวกับการเคลื่อนที่สัมพัทธ์ในหน่วยก่อนหน้านี้และตอนนี้สามารถใช้แนวคิดเหล่านั้นเพื่อช่วยในการวางลูกบาศก์ที่สอง
เพื่อไปยังมุมถัดไปของพาเลทแขน 6 แกนจะเคลื่อนที่ไปในทิศทางบวกตามแกน y 
การใช้สิ่งที่ทราบเกี่ยวกับขนาดของลูกบาศก์สามารถกำหนดออฟเซ็ตที่จำเป็นในการวางลูกบาศก์ที่สองได้ ออฟเซ็ตคือความแตกต่างระหว่างตำแหน่งปัจจุบันและตำแหน่งที่ต้องการของวัตถุ บนพาเลทออฟเซ็ตสำหรับลูกบาศก์ที่สองคือระยะห่างระหว่างศูนย์กลางของลูกบาศก์ที่หนึ่งและศูนย์กลางของลูกบาศก์ที่สองในตำแหน่งที่ต้องการ
เนื่องจากลูกบาศก์มีความกว้าง 25 มม. เราจึงสามารถประมาณค่าออฟเซ็ตได้ 50 มม.
ตอนนี้คุณรู้ระยะทางและทิศทางของการเคลื่อนไหวสัมพัทธ์ที่ต้องการแล้วข้อมูลนี้สามารถเพิ่มลงในโครงการได้
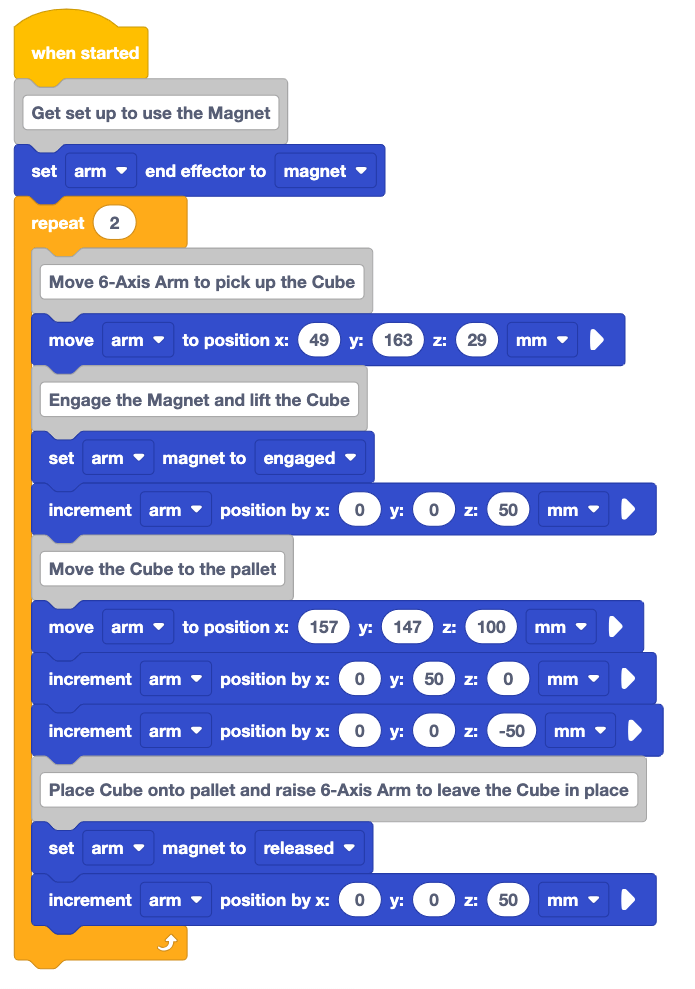
เพิ่ม บล็อกตำแหน่ง การเพิ่มขึ้นในโครงการตามที่แสดงที่นี่
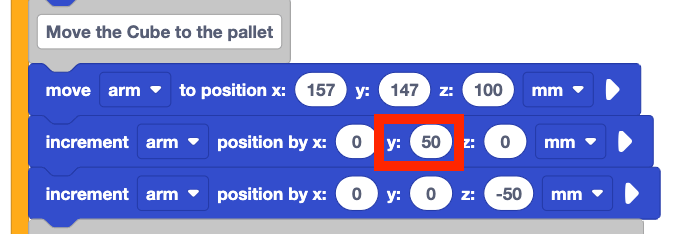
ตั้งค่าพารามิเตอร์ y เป็น 50 นี่แสดงถึงการเคลื่อนที่สัมพัทธ์ 50 มม. ไปตามแกน y
อ่านรหัสและคาดการณ์พฤติกรรมของแขน 6 แกน
บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณ คุณคิดว่าโครงการนี้จะประสบความสำเร็จในการวางคิวบ์ทั้งสองในสถานที่ที่ต้องการหรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
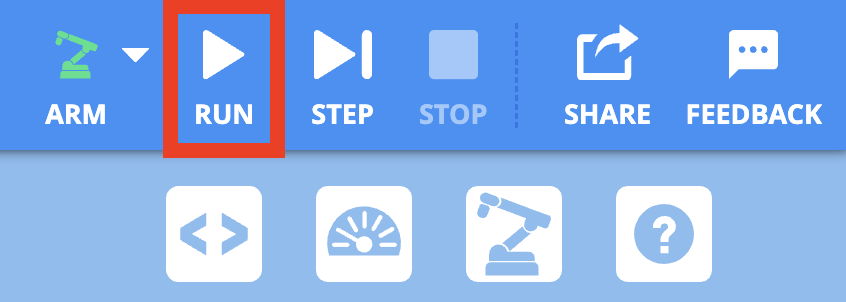
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode แล้ว เรียกใช้โปรเจกต์เพื่อทดสอบ
สังเกตพฤติกรรมของแขน 6 แกน

หยุดโครงการเมื่อแขน 6 แกนเคลื่อนที่เสร็จสิ้น บันทึกการสังเกตของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
การสังเกตของคุณตรงกับการคาดการณ์ของคุณหรือไม่? ลูกบาศก์ทั้งสองถูกย้ายไปยังตำแหน่งที่ต้องการบนพาเลทหรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
ตามที่คุณคาดการณ์ไว้โครงการนี้ยังไม่ย้ายลูกบาศก์ทั้งสองไปยังสถานที่ที่ต้องการ บล็อกตำแหน่ง เพิ่มขึ้นย้ายแขน 6 แกนไปยังตำแหน่งที่ต้องการสำหรับลูกบาศก์ที่สองอย่างถูกต้อง อย่างไรก็ตามเนื่องจากพฤติกรรมทั้งหมดถูกทำซ้ำ ลูกบาศก์ ทั้งสองจึงถูกย้ายไปยังตำแหน่งนี้ สิ่งนี้สร้างข้อผิดพลาดเดียวกันกับโปรเจกต์ก่อนหน้าเพียงแค่อยู่ในตำแหน่งที่แตกต่างกันบนพาเลท
เป้าหมายคือการวางลูกบาศก์แรกในตำแหน่งแรกและลูกบาศก์ที่สองในตำแหน่งที่สองบนพาเลท เพื่อให้การดำเนินการนี้ประสบความสำเร็จโปรเจกต์จะต้องติดตามว่าคิวบ์กำลังถูกย้ายไปอยู่ที่ใด หากมีการเคลื่อนย้ายลูกบาศก์แรกควรไปที่ตำแหน่งแรก หากลูกบาศก์ที่สองถูกเคลื่อนย้ายสามารถวางไว้ในตำแหน่งที่สองได้
การย้ายลูกบาศก์สองก้อนโดยใช้ตัวแปรและบล็อค If then
เพื่อติดตามว่าคิวบ์ใดกำลังถูกย้ายตัวแปรสามารถสร้างและใช้ในโครงการเพื่อ 'นับ' คิวบ์ขณะที่กำลังถูกจัดการ ตัวแปรสามารถใช้เพื่อจัดเก็บข้อมูลเกี่ยวกับคิวบ์ที่กำลังถูกย้าย จากนั้นข้อมูลนี้สามารถนำมาใช้ในการตัดสินใจภายในโครงการ – หากแขน 6 แกนกำลังเคลื่อนย้ายลูกบาศก์ที่สอง ก็ควรย้ายไปยังตำแหน่งที่สองบนพาเลท
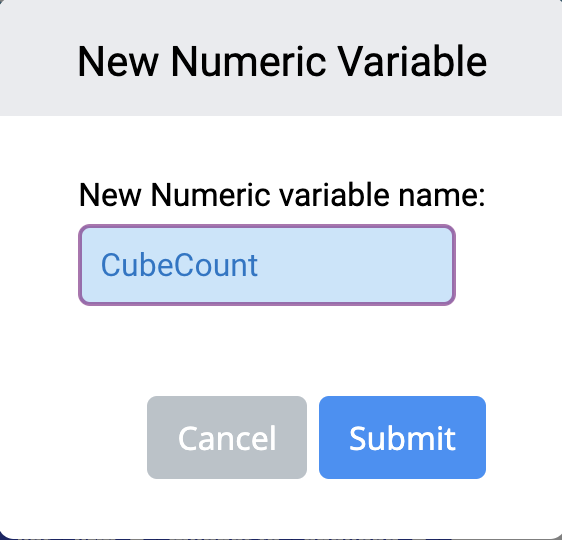
ตั้งค่าตัวแปรและตั้งชื่อ เป็นCubeCount เลือก ส่ง เพื่อสร้างตัวแปร
คุณสามารถทบทวน บทที่ 6 บทเรียนที่ 2 สำหรับการแจ้งเตือนเกี่ยวกับวิธีการสร้างตัวแปรใน VEXcode
เพิ่ม บล็อก ตั้งค่าตัวแปรไปยังโครงการเหนือ บล็อกการ ทำซ้ำดังที่แสดงไว้ที่นี่
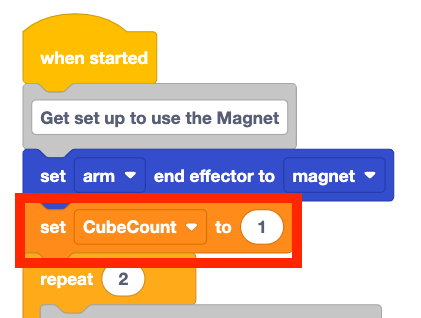
ตั้งค่าพารามิเตอร์เป็น 1 ตรวจสอบให้แน่ใจ ว่าได้เลือก ตัวแปร CubeCount ในเมนูแบบเลื่อนลง
เมื่อโครงการเริ่มต้นขึ้น Cube แรกจะถูกหยิบขึ้นมา เนื่องจากวัตถุประสงค์ของตัวแปรนี้คือการนับลูกบาศก์ที่กำลังถูกย้ายจึงต้องตั้งค่าเป็น '1' เพื่อเริ่มต้น
ก่อนหน้านี้ บล็อกตำแหน่งที่เพิ่ม ขึ้นถูกเพิ่มเพื่อย้ายแขน 6 แกนไปยังตำแหน่งวางที่สอง ในการย้ายคิวบ์แรกไปยังสถานที่ส่งบล็อกนี้จะต้องถูกลบออก
คลิกขวาที่ บล็อกตำแหน่งการ เพิ่มและลบตามที่แสดงที่นี่
เพิ่ม บล็อก เปลี่ยนตัวแปรที่ด้านล่างของ บล็อกการ ทำซ้ำดังที่แสดงไว้ที่นี่
เมื่อโครงการดำเนินการ Cube แรกจะถูกย้ายไปยังสถานที่ส่งคืน การเพิ่ม บล็อก เปลี่ยนตัวแปรที่นี่จะทำให้ CubeCount เพิ่มขึ้นหลังจากที่ Cube แรกถูกส่งมอบ เมื่อ บล็อก ทำซ้ำวนกลับไปรับลูกบาศก์ที่สองตัวแปรจะเพิ่มขึ้น '2' แสดงว่าลูกบาศก์ที่สองกำลังถูกย้าย
ตอนนี้โครงการกำลังจัดเก็บข้อมูลเกี่ยวกับจำนวนลูกบาศก์เราสามารถใช้ข้อมูลนั้นในการตัดสินใจได้
หากเป็นเช่นนั้น บล็อกจะช่วยให้เราสามารถถามคำถามภายในโครงการและใช้ข้อมูล (เช่นมูลค่าของตัวแปร)
ในการตัดสินใจ 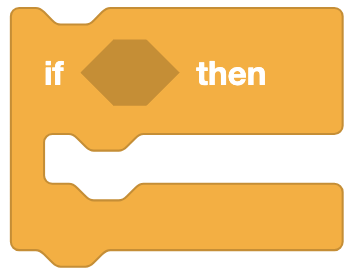
If then block is a C block that accept Boolean reporter blocks as a condition. บล็อกบูลีนจะส่งคืนเงื่อนไขเป็นจริงหรือเท็จและพอดีกับภายในบล็อกใดๆที่มีอินพุตหกเหลี่ยม หากเงื่อนไขเป็นจริงบล็อกภายในบล็อก C จะทำงาน หากเงื่อนไขรายงานเป็นเท็จบล็อกถ้าเป็นเช่นนั้นจะถูกข้ามไปในโครงการ
ในกรณีนี้เงื่อนไขที่เรากำลังมองหาคือ ตัวแปร CubeCount จะเป็น 2 หาก ตัวแปร CubeCount เป็น 2 แขน 6 แกนจะต้องเลื่อนไปยังตำแหน่งที่สองบนพาเลท
ลองคิดดูว่าในโครงการจะต้องมีการตัดสินใจอย่างไรบ้าง
โปรเจกต์จะรับคิวบ์ในโซนโหลดจากนั้นย้ายไปอยู่เหนือจุดส่ง หาก CubeCount เท่ากับ
2 แขน 6 แกนจะต้องทำพฤติกรรมพิเศษเพื่อย้ายไปยังตำแหน่งพาเลทที่สอง 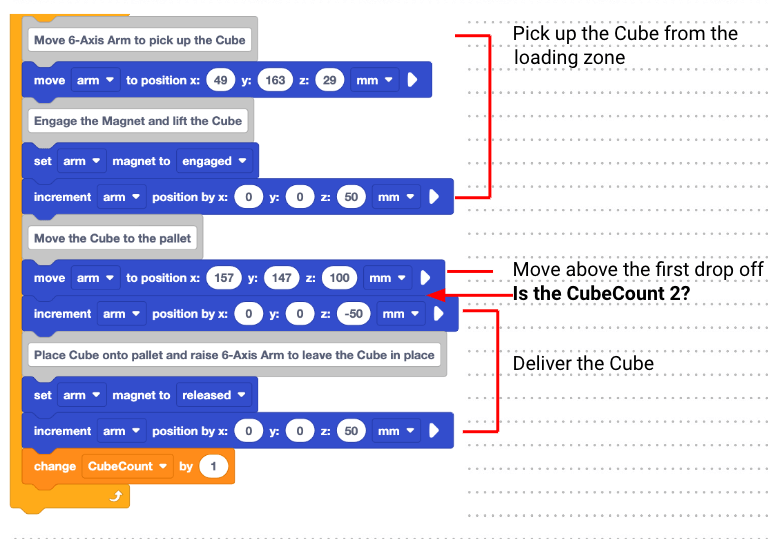
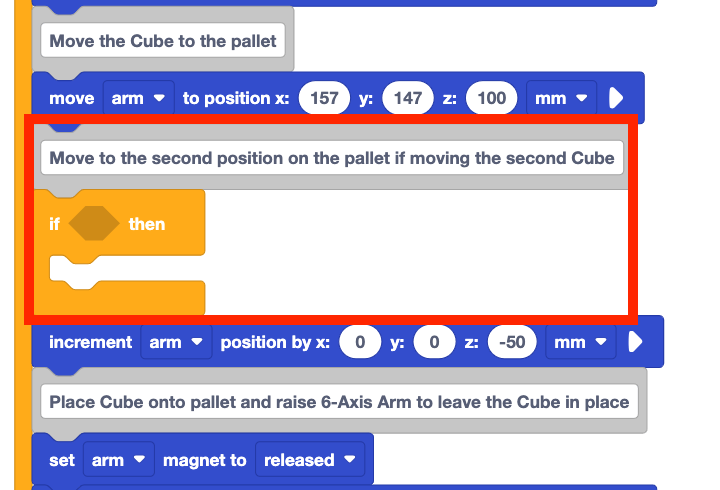
เพิ่ม If แล้ว บล็อคไปยังโปรเจกต์ดังที่แสดงไว้ที่นี่
เพิ่ม Equal เพื่อ บล็อกเข้าไปในช่องว่างหกเหลี่ยมใน If then block ดังที่แสดงไว้ที่นี่
เพิ่ม ตัวแปร CubeCount ลงในด้านซ้ายของ Equal ให้กับ ผู้ปฏิบัติงาน ตั้งค่าด้านขวาของ เครื่องหมาย เท่ากับโอเปอเรเตอร์เป็น 2 ดังที่แสดงในวิดีโอนี้
หาก ตัวแปร CubeCount เท่ากับ 2 เงื่อนไขบูลีนจะรายงานเป็นจริง หาก CubeCount ไม่ใช่ 2 เงื่อนไขบูลีนจะรายงานเป็นเท็จ
เพิ่มบล็อคตำแหน่ง เพิ่มขึ้น ภายในบล็อค C ตามที่แสดงที่นี่
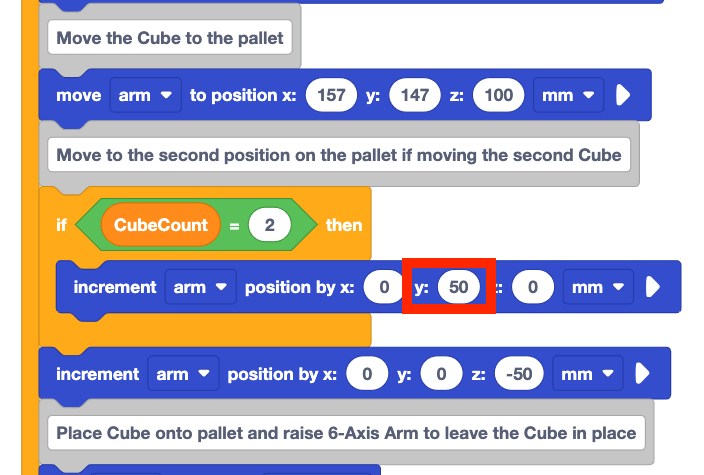
ตั้งค่าพารามิเตอร์ y ของ บล็อกตำแหน่งที่ เพิ่มขึ้นเป็น 50
เมื่อตรงกับเงื่อนไข ของบล็อค If then บล็อคตำแหน่ง Increment ภายในบล็อค If then จะ ถูกดำเนินการ ซึ่งหมายความว่าหาก CubeCount เป็น 2 แกนแขน 6 แกนจะทำให้การเคลื่อนที่สัมพัทธ์ไปยังตำแหน่งที่สองบนพาเลท
อ่านรหัสและคาดการณ์ว่าแขน 6 แกนจะทำอะไรเมื่อดำเนินโครงการ
บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode แล้ว เรียกใช้โปรเจกต์เพื่อทดสอบ
สังเกตพฤติกรรมของแขน 6 แกนในขณะที่โครงการดำเนินการ
หยุดโครงการเมื่อแขน 6 แกนเคลื่อนที่เสร็จแล้ว บันทึกการสังเกตของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
แขน 6 แกนเคลื่อนไหวตามที่คุณคาดการณ์ไว้หรือไม่? ลูกบาศก์ทั้งสองถูกย้ายไปยังพาเลทตามที่ตั้งใจไว้หรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
สำหรับข้อมูลของคุณ
คุณอาจต้องการเรียกใช้โปรเจกต์หลายครั้งเพื่อให้คุณสามารถให้ความสนใจกับบล็อกที่กำลังทำงานขณะที่แขน
6 แกนกำลังเคลื่อนที่
มองหาไฮไลท์รอบๆบล็อคในขณะที่ดำเนินการในโครงการเพื่อช่วยให้คุณเข้าใจได้ดีขึ้นเมื่อมีการเรียกใช้บล็อค
If then นอกจากนี้คุณยังสามารถใช้ ฟีเจอร์ขั้น
ตอนเพื่อเรียกใช้โปรเจกต์ได้ทีละบล็อกเพื่อช่วยให้คุณเห็นขั้นตอนของโปรเจกต์ด้วย If then
block ได้ชัดเจนยิ่งขึ้น 
โปรดจำไว้ว่าคุณสามารถเพิ่มตัวแปรลงในจอภาพเพื่อช่วยดู ค่า CubeCount ขณะที่โครงการกำลังทำงานอยู่ หากต้องการเพิ่มตัวแปรลงในจอภาพให้ลากตัวแปรลงในไอคอนจอภาพใน Workspace ดังที่แสดงในวิดีโอนี้ ในขณะที่คุณเรียกใช้โครงการอย่าลืมดูตัวแปรในการตรวจสอบเพื่อช่วยให้คุณเห็นการเชื่อมต่อระหว่างค่าตัวแปรและการไหลของโครงการ
การตรวจสอบโครงการ
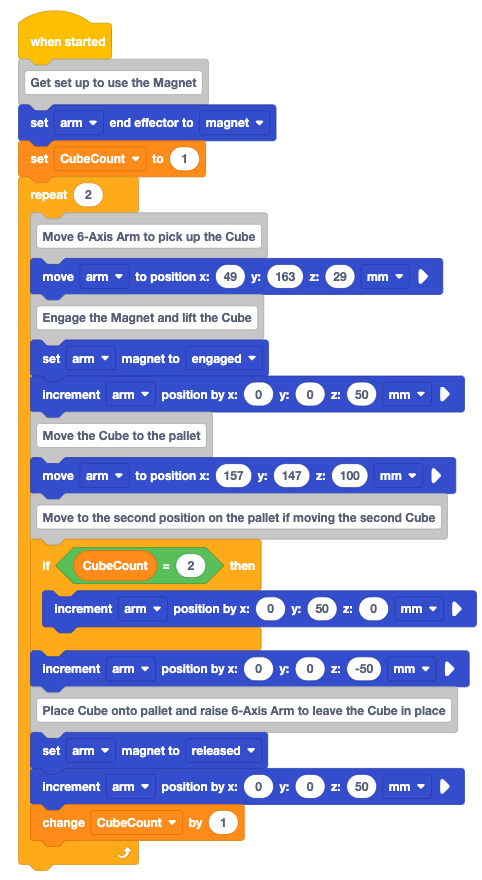
มาทบทวนกระบวนการแก้ปัญหาที่ใช้ในการแก้ปัญหาความท้าทายในการวางลูกบาศก์สองก้อนบนพาเลท โครงการนี้มีการทำซ้ำหลายครั้งเพื่อให้แกนแขน 6 แกนเคลื่อนย้ายลูกบาศก์ทั้งสองตามที่ตั้งใจไว้:
- มีการเพิ่ม บล็อกการ ทำซ้ำเพื่อทำซ้ำพฤติกรรมที่จำเป็นในการหยิบเคลื่อนย้ายและส่งมอบลูกบาศก์ไปยังพาเลท
- บล็อกตำแหน่ง เพิ่มขึ้นถูกเพิ่มเพื่อย้ายลูกบาศก์ที่สองไปยังตำแหน่งเปิดบนพาเลท
- มีการเพิ่มตัวแปรเพื่อนับลูกบาศก์เพื่อให้สามารถตัดสินใจได้ตามที่ลูกบาศก์ถูกย้าย
- มีการ เพิ่มบล็อค If then เพื่อทำ การตัดสินใจตามค่าของตัวแปร
การทำซ้ำทั้งหมดเหล่านี้ร่วมกันสร้างโปรเจกต์ที่หยิบขึ้นมาและส่งมอบลูกบาศก์ทั้งสองสำเร็จ เมื่อหยิบลูกบาศก์ก้อนที่สองขึ้นมาแขน 6
แกนจะย้ายลูกบาศก์ไปอยู่เหนือตำแหน่งวางเดิมบนพาเลทอีกครั้ง จากนั้นก็มีการตัดสินใจ  เนื่องจาก CubeCount คือ '2' บล็อกภายใน If แล้ว
บล็อกจะทำงานย้าย Cube ไปตามแกน y ไปยังตำแหน่งที่ต้องการพาเลท
เนื่องจาก CubeCount คือ '2' บล็อกภายใน If แล้ว
บล็อกจะทำงานย้าย Cube ไปตามแกน y ไปยังตำแหน่งที่ต้องการพาเลท
กระบวนการทำซ้ำที่ท่านมีส่วนร่วมตลอดบทเรียนนี้เป็นสิ่งที่ท่านจะทำต่อไปทุกครั้งที่ท่านแก้ปัญหาความท้าทายด้วยแขน 6 แกน สิ่งสำคัญคือต้องจำไว้ว่าความท้าทายในการเขียนโค้ดส่วนใหญ่จะไม่ได้รับการแก้ไขอย่างสมบูรณ์แบบในการทดลองครั้งแรก กระบวนการวางแผนสร้างทดสอบและประเมินผลนี้เป็นกระบวนการที่สามารถนำกลุ่มของคุณไปสู่การหาโซลูชันที่สร้างสรรค์ ความท้าทายส่วนใหญ่สามารถแก้ไขได้หลายวิธีดังนั้นโดยการมีส่วนร่วมในกระบวนการนี้ร่วมกันคุณสามารถค้นหากลยุทธ์ที่ดีที่สุดสำหรับกลุ่มของคุณ
กิจกรรม
ตอนนี้คุณได้ ย้ายลูกบาศก์สองก้อนจากโซนโหลดไปยังพาเลทคุณจะได้ฝึกทักษะเหล่านี้ ในกิจกรรมนี้คุณจะสร้างโปรเจกต์ของคุณจากบทเรียนนี้เพื่อกำหนดรหัสแขน 6 แกนย้ายลูกบาศก์สี่ก้อนไปยังพาเลท
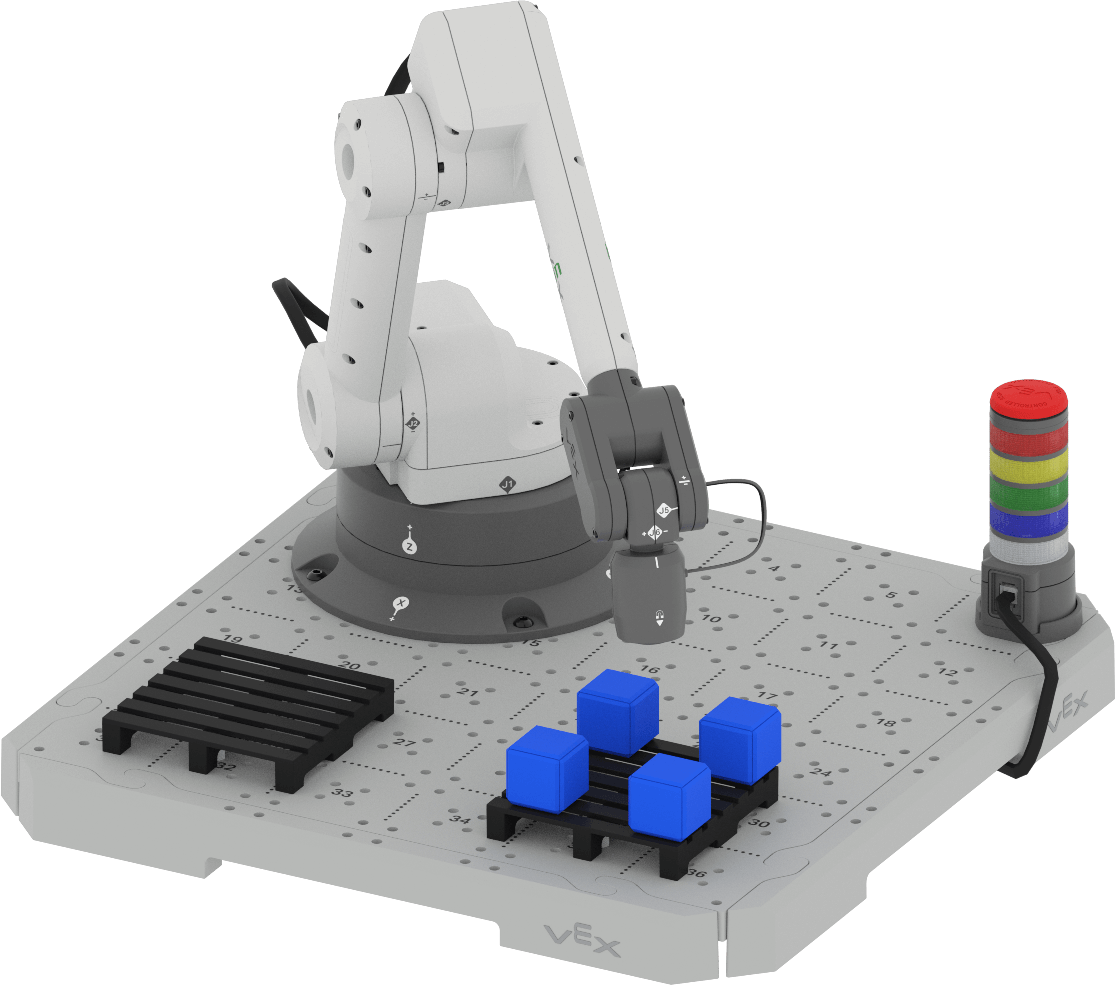
กิจกรรม: เขียนรหัสแขน 6 แกนเพื่อวางลูกบาศก์สี่ก้อนบนพาเลทเดียว
- วางแผนว่าคุณจะสร้างโปรเจกต์ของคุณอย่างไรเพื่อใส่รหัสแขน 6
แกนเพื่อรับ ลูกบาศก์เพิ่มเติมจากโซนโหลดและวางไว้บน พาเลทกับกลุ่มของคุณ
ตรวจสอบให้แน่ใจว่าคุณทุกคนเห็นด้วยกับแนวทางของคุณก่อนที่จะเริ่มแก้ไขโครงการ
- บันทึกแผนของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
- เปลี่ยนชื่อโปรเจกต์ของคุณ หน่วยที่ 7 บทเรียนที่ 3 กิจกรรม และบันทึกลงในอุปกรณ์ของคุณก่อนที่คุณจะเริ่มแก้ไขโปรเจกต์
- แก้ไขโปรเจกต์ใน VEXcode ให้ตรงกับแผนที่กลุ่มของคุณตกลงกันไว้
- เรียกใช้โปรเจกต์เพื่อทดสอบ วาง ลูกบาศก์ก้อนที่สองสามและสี่ด้วยตนเองที่โซนโหลดเมื่อวางลูกบาศก์ แต่ละก้อนแล้ว
- แขน 6 แกนเคลื่อนลูกบาศก์ได้สำเร็จตามที่คุณตั้งใจไว้หรือไม่? ควรมีสี่ลูกบาศก์บนพาเลท หากไม่มีให้แก้ไขโปรเจกต์ต่อไปจนกว่าคุณจะวางคิวบ์ทั้งหมดสี่คิวบ์เรียบร้อยแล้ว
ตรวจสอบความเข้าใจของคุณ
ก่อนที่จะไปยังบทเรียนถัดไปตรวจสอบให้แน่ใจว่าท่านเข้าใจแนวคิดในบทเรียนนี้โดยตอบคำถามต่อไปนี้ในสมุดบันทึกวิศวกรรมของท่าน
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของ คุณ > ( Google Doc /.docx /.pdf)
เลือก ถัด > ไปเพื่อไปยังกิจกรรม Putting It All Together