
ปราสาทแครชเชอร์
6 บทเรียน
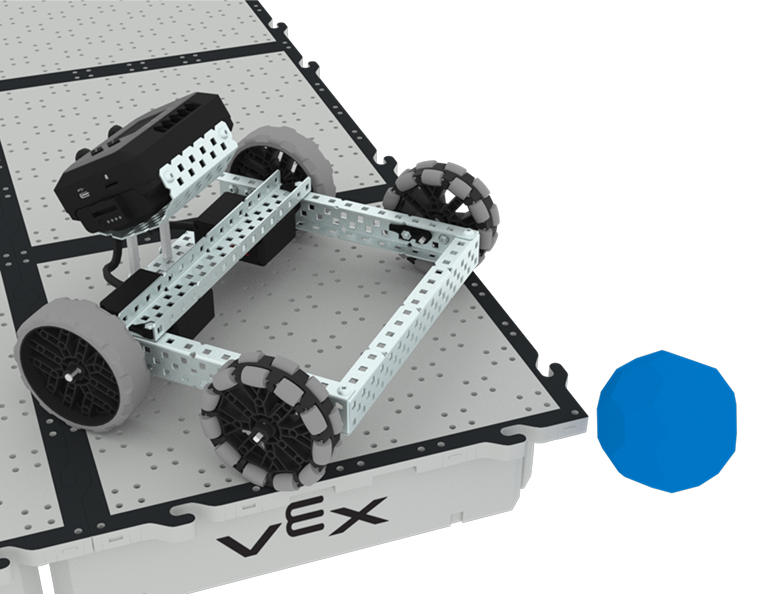
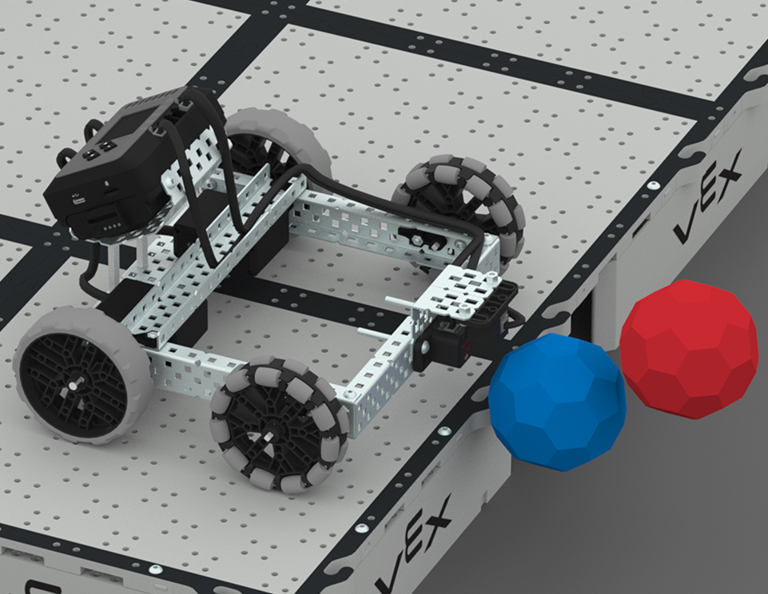
ในบทนี้ คุณจะได้สำรวจวิธีการใช้เซ็นเซอร์แบบออปติคัลและระยะทางเพื่อค้นหา ชน และเคลียร์ 'ปราสาท' ของ Buckyball เพื่อทำคะแนนในการแข่งขัน Castle Crasher!
ไปที่พอร์ทัลครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของบทเรียน Castle Crasher
บทที่ 1: บทนำ
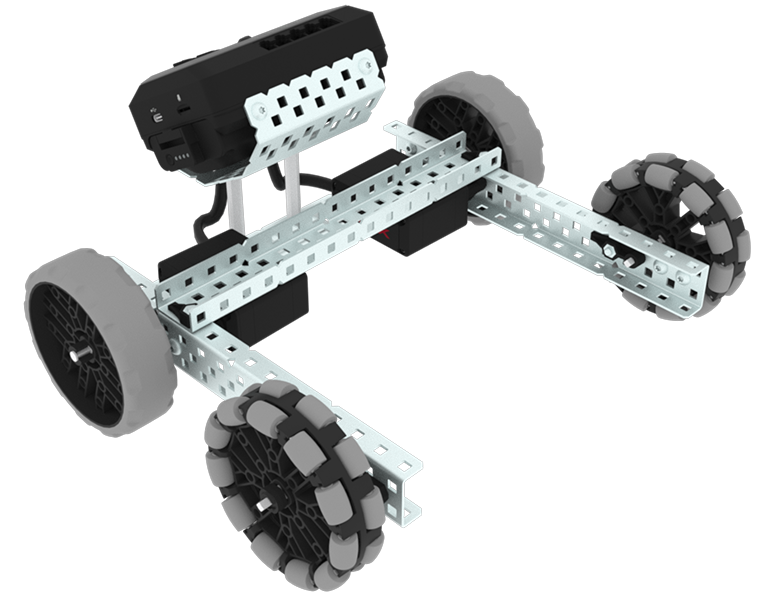
ในบทเรียนนี้คุณจะได้รับการแนะนำให้รู้จักกับการแข่งขัน Castle Crasher สร้าง BaseBot และเตรียมพร้อมสำหรับการเขียนโค้ด
บทที่ 2: Castle Crasher ไม่มีเซ็นเซอร์
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับการคำนวณมุมและการเปลี่ยนความเร็วของหุ่นยนต์ของคุณเพื่อให้คุณสามารถแข่งขันใน Buckyball Blitz Challenge
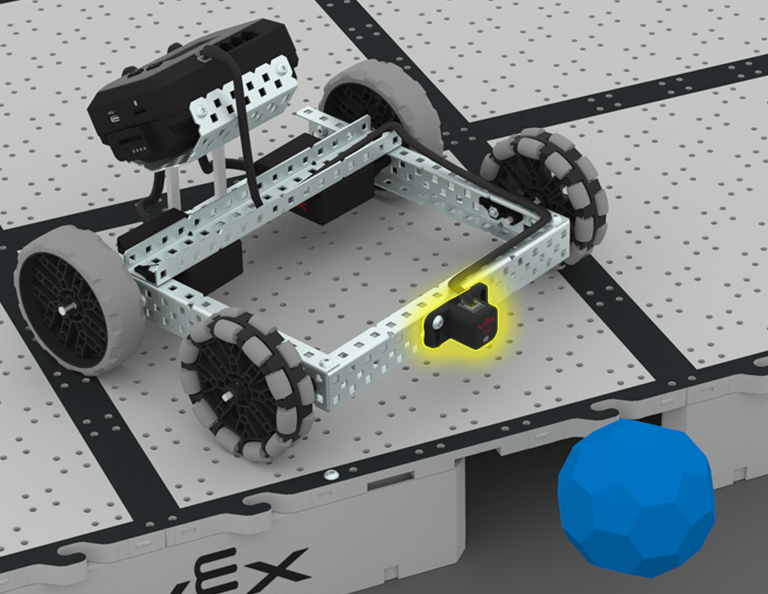
บทที่ 3: Castle Crasher + เซ็นเซอร์ระยะทาง
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับเซ็นเซอร์ระยะทางคืออะไรและสามารถใช้กับหุ่นยนต์ของคุณได้อย่างไร นอกจากนี้คุณยังจะได้เรียนรู้เกี่ยวกับบล็อก [รอจนกว่า] และวิธีใช้ในโครงการ VEXcode EXP จากนั้นคุณจะนำสิ่งที่คุณได้เรียนรู้ไปใช้ในการแข่งขันใน Sense and Sweep Challenge!
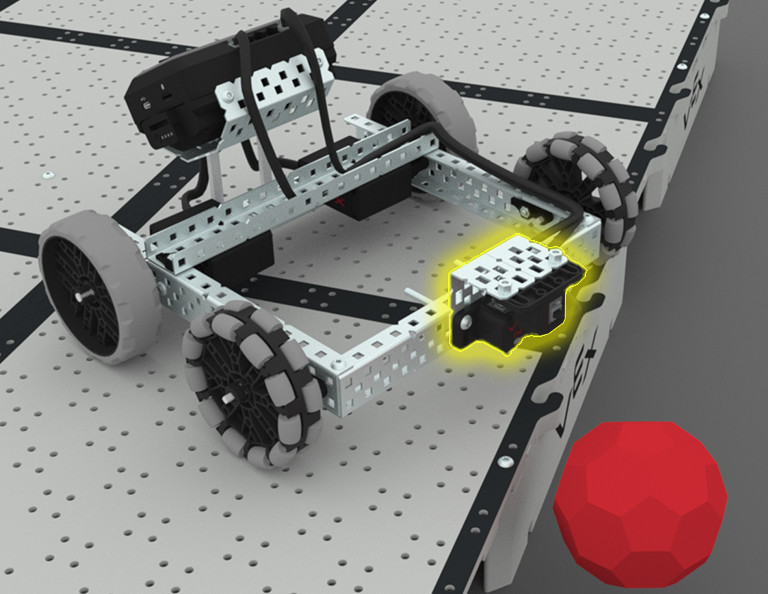
บทที่ 4: การสร้างอัลกอริทึม
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับออปติคัลเซนเซอร์และวิธีการสร้างอัลกอริทึมที่ใช้ข้อเสนอแนะของเซ็นเซอร์ จากนั้นคุณจะต้องตั้งรหัสให้หุ่นยนต์ของคุณค้นหา Buckyballs โดยอัตโนมัติและผลักพวกมันออกจากสนามในการแข่งขัน Sweep the Field
บทเรียนที่ 5: การแข่งขัน Castle Crasher
ในบทเรียนนี้คุณจะใช้การเรียนรู้ของคุณจากบทเรียนก่อนหน้านี้เพื่อแข่งขันในการแข่งขัน Castle Crasher!

Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.