
แข่งขัน
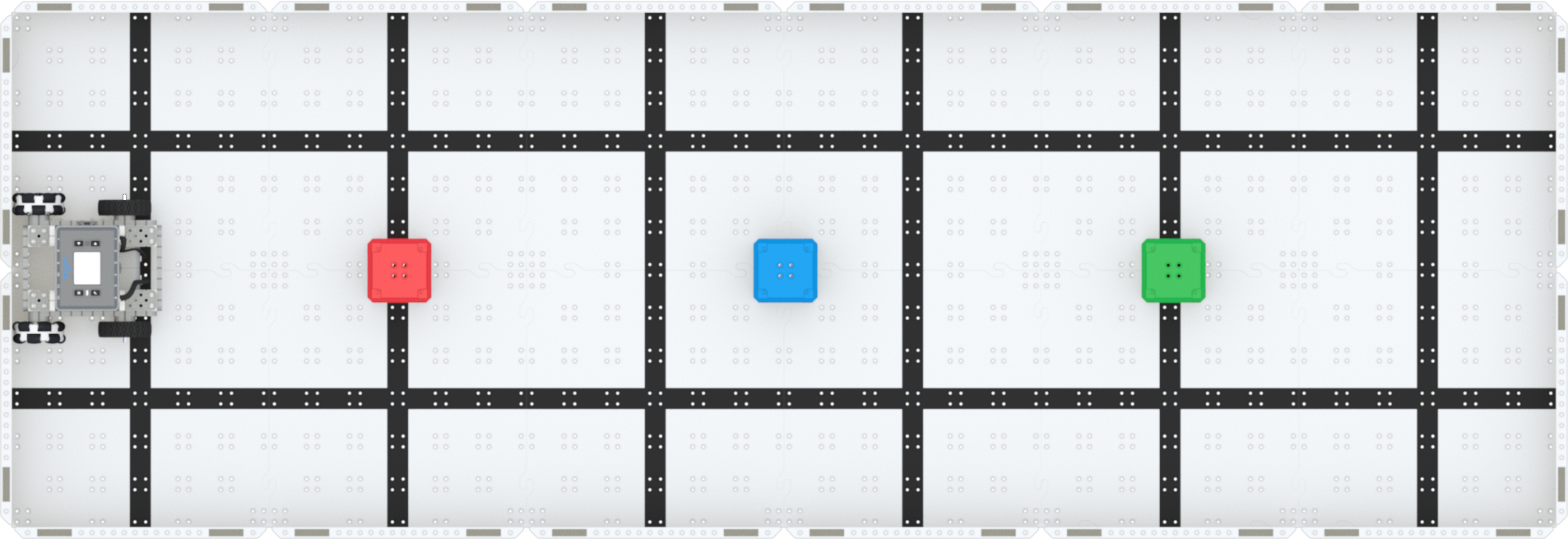
ตอนนี้คุณได้ฝึกใช้ตัวควบคุมไดรเวอร์ทั้งสี่ตัวเพื่อขับ BaseBot ของคุณแล้ว ได้เวลาทำภารกิจ Figure Eight Challenge ให้ ชมแอนิเมชันด้านล่างเพื่อดูว่า BaseBot สามารถเคลื่อนที่เพื่อขับเคลื่อนรูปเลขแปดรอบลูกบาศก์ทั้งสองบน Field ได้อย่างไร
ปฏิบัติตามขั้นตอนในเอกสารนี้เพื่อเล่น Figure Eight Challenge
Google Doc / .docx / .pdf
เมื่อคุณทำ Figure Eight Challenge เสร็จแล้ว ให้ติดต่อครูของคุณ ให้แน่ใจว่าคุณได้บันทึกผลลัพธ์ของความท้าทายไว้ในสมุดบันทึกวิศวกรรมของคุณแล้ว
สรุปการสะท้อนความคิด
ตอนนี้คุณได้ทดสอบการกำหนดค่าคอนโทรลเลอร์ทั้งหมดและเล่น Figure Eight Challenge แล้ว ถึงเวลาทบทวนสิ่งที่คุณได้เรียนรู้และได้ทำในบทเรียนนี้ เริ่มหน้าใหม่ในสมุดบันทึกวิศวกรรมของคุณเพื่อเริ่ม การสะท้อนความคิดของคุณ
ให้คะแนนตัวเองในฐานะ ผู้เริ่มหัด ผู้ฝึกหัดหรือ ผู้เชี่ยวชาญ ในแต่ละแนวคิดต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ ให้คำอธิบายสั้นๆ ว่าเหตุใดคุณจึงให้คะแนนตัวเองเป็น ในแต่ละแนวคิด:
- ความแตกต่างระหว่างการกำหนดค่าการควบคุมไดรเวอร์ทั้งสี่แบบที่แตกต่างกัน
- ทดสอบการกำหนดค่าไดรเวอร์ที่แตกต่างกัน เพื่อให้ได้เวลาที่เร็วที่สุดในการท้าทาย
- การทำงานร่วมกัน กับผู้อื่นในระหว่างบทเรียนนี้
ใช้ตารางนี้เพื่อช่วยคุณกำหนดว่าคุณอยู่ในหมวดหมู่ใด
| ผู้เชี่ยวชาญ | ฉันคิดว่าฉันเข้าใจแนวคิดนี้เป็นอย่างดีและสามารถสอนเรื่องนี้ให้กับคนอื่นได้ |
| ลูกจ้างฝึกงาน | ฉันรู้สึกว่าตนเองเข้าใจแนวคิดเพียงพอที่จะแข่งขันความท้าทายนี้ได้ |
| สามเณร | ฉันรู้สึกว่าไม่เข้าใจคอนเซปต์และไม่รู้ว่าจะทำความท้าทายนี้ให้สำเร็จได้อย่างไร |
ต่อไปจะเป็นอะไร?
ในบทเรียนนี้ คุณได้ฝึกฝนการขับเคลื่อนหุ่นยนต์ของคุณด้วยตัวควบคุมและแข่งขันใน Figure Eight Challenge
ในบทเรียนถัดไป คุณจะ:
- เรียนรู้วิธีปรับเปลี่ยนการสร้าง BaseBot ของคุณโดยการเปลี่ยนล้อ
- ทดลองใช้ล้อที่แตกต่างกันเพื่อดูว่าล้อเหล่านั้นส่งผลต่อการขับเคลื่อนและการหมุนของหุ่นยนต์ของคุณอย่างไร
- ร่วมแข่งขันใน Slalom Course Challenge!
เลือก < กลับไปที่บทเรียน เพื่อกลับไปยังภาพรวมบทเรียน
เลือก บทเรียนถัดไป > เพื่อไปยังบทเรียนที่ 3 และเรียนรู้วิธีปรับเปลี่ยนการสร้าง BaseBot ของคุณโดยการเปลี่ยนล้อ