
การเขียนโปรแกรมตามเหตุการณ์: การสื่อสารระหว่างบล็อก
![]() กล่องเครื่องมือสำหรับครู
กล่องเครื่องมือสำหรับครู
เป้าหมายของส่วน Rethink คือเพื่อให้ผู้เรียนสามารถใช้ปุ่มบนตัวควบคุมโดยใช้การเขียนโปรแกรมตามเหตุการณ์
ส่วนนี้ประกอบด้วย:
-
ภาพรวมการเขียนโปรแกรมตามเหตุการณ์
-
ตัวอย่างโครงการ คำแนะนำการดาวน์โหลด & ภาพรวม
-
กิจกรรมรีมิกซ์:
-
คว้าวัตถุ!
-
อัญมณีสี
-
การแข่งขันวิ่งผลัด!
-
-
คำถามรีมิกซ์
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
- สามารถจับคู่คอนโทรลเลอร์กับ Robot Brain ก่อนเข้าเรียนเพื่อประหยัดเวลา ตัดสินใจว่าคุณต้องการดำเนินการขั้นตอนนี้ให้เสร็จสิ้นหรือไม่ หรือคุณต้องการให้นักเรียนดำเนินการดังกล่าว ทำตามขั้นตอน ที่นี่. คุณสามารถพิมพ์บทความนี้ออกมาเพื่อให้เหล่านักเรียนใช้ หากคุณต้องการให้พวกเขาจับคู่คอนโทรลเลอร์กับสมอง
- การเขียนโปรแกรมตามเหตุการณ์ช่วยให้ Clawbot สามารถทริกเกอร์เหตุการณ์หรือตอบสนองต่อทริกเกอร์ได้ การเขียนโปรแกรมประเภทนี้ช่วยให้บล็อกหนึ่งสื่อสารกับบล็อกอื่น ๆ ได้
กล่าวอีกนัยหนึ่ง Clawbot ตอบสนองต่อการเคลื่อนไหวของจอยสติ๊กของตัวควบคุม การเคลื่อนไหวของจอยสติ๊กเป็นตัวกระตุ้น และ Clawbot จะตอบสนองตามนั้น
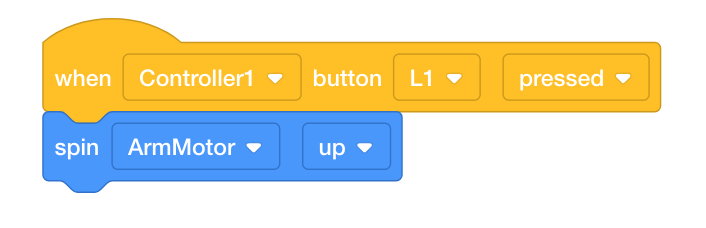
ในตัวอย่างข้างต้น การกดปุ่ม L 1 จะเป็นทริกเกอร์ที่จะหมุน ArmMotor ขึ้น บล็อก [เมื่อปุ่มควบคุม] จะสื่อสารข้อความดังกล่าวไปยังบล็อก [หมุน]
หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับบล็อก ให้เปิดข้อมูล ช่วยเหลือ

การเขียนโปรแกรมตามเหตุการณ์
หากสุนัขของคุณนำสายจูงมาให้คุณหรือมานั่งที่ประตู แสดงว่ามันกำลังบอกคุณว่ามันต้องการออกไปข้างนอก ในโรงเรียน เมื่อคุณครูถามคำถามและเห็นคุณยกมือขึ้น คุณครูจะเชื่อว่าคุณรู้คำตอบและอยากตอบคำถามนั้น พฤติกรรมเหล่านี้เรียกอีกอย่างว่า “ตัวกระตุ้น”
สุนัขของคุณรู้ว่าการจูงสายจูงมาให้คุณหรือการนั่งที่ประตูเป็นตัวกระตุ้นที่ทำให้คุณรู้ว่าเขาต้องการออกไปข้างนอก ดังนั้นเมื่อคุณเห็นเขานั่งอยู่ที่ประตูพร้อมสายจูง คุณก็ตอบสนองต่อการกระตุ้นโดยพาเขาออกไปข้างนอก การยกมือเป็นการกระตุ้นที่ทำให้ครูรู้ว่าคุณต้องการตอบคำถาม จากนั้นครูจะตอบสนองต่อทริกเกอร์โดยเรียกคุณ
การเขียนโปรแกรมตามเหตุการณ์ในหุ่นยนต์คือเมื่อพฤติกรรมของหุ่นยนต์บางอย่างกระตุ้นให้หุ่นยนต์ทำสิ่งบางอย่างหรือตอบสนองต่อทริกเกอร์บางอย่าง
![]() กล่องเครื่องมือสำหรับครู
-
การตรวจสอบบล็อค
กล่องเครื่องมือสำหรับครู
-
การตรวจสอบบล็อค
- ขอให้นักเรียนเปิดโครงการตัวอย่าง Clawbot Controller with Events ใน VEXcode V5

- ในการทำกิจกรรมของชั้นเรียนโดยรวม ให้ทบทวนบล็อกการเขียนโปรแกรมกับนักเรียน แจ้งนักเรียนว่าสามารถทริกเกอร์เหตุการณ์ต่างๆ ได้หลายเหตุการณ์ภายในโครงการควบคุม Clawbot พร้อมๆ กันได้ ซึ่งจะทำให้พวกเขาสามารถควบคุมการเคลื่อนไหวในการขับเคลื่อนของ Clawbot ได้ รวมถึงการเคลื่อนไหวของแขนและกรงเล็บของ Clawbot ได้
- หากนักเรียนต้องการทบทวน VEXcode V5 อย่างรวดเร็ว พวกเขาสามารถอ้างอิงบทช่วยสอนได้ตลอดเวลาในระหว่างการสอบสวนนี้ บทช่วยสอนจะอยู่ในแถบเครื่องมือ นักเรียนสามารถตรวจสอบการบันทึก การดาวน์โหลด และการรันโครงการ พร้อมกับรายการอื่นๆ ได้ในแบบฝึกสอน


| ปริมาณ | วัสดุที่ต้องใช้ |
|---|---|
| 1 |
กรงเล็บหุ่นยนต์ |
| 1 |
แบตเตอรี่หุ่นยนต์ชาร์จแล้ว |
| 1 |
วิทยุ VEX V5 |
| 1 |
ผู้ควบคุม |
| 1 |
สายเทเธอร์ |
| 1 |
รหัส VEX V5 |
| 1 |
สาย USB (หากใช้คอมพิวเตอร์) |
| 1 |
สมุดบันทึกวิศวกรรม |
ก่อนเริ่มดำเนินกิจกรรม...
คุณมีแต่ละรายการเหล่านี้พร้อมแล้วหรือยัง? ผู้สร้างควรตรวจสอบแต่ละสิ่งต่อไปนี้:
-
มอเตอร์และเซ็นเซอร์ทั้งหมดเสียบเข้ากับพอร์ตที่ถูกต้องหรือไม่
-
ตัวควบคุม จับคู่ กับสมองหุ่นยนต์หรือไม่?