
الدرس 3: الانعطاف لمسافة أبعد
الانتقال إلى موقع الانعطاف
-
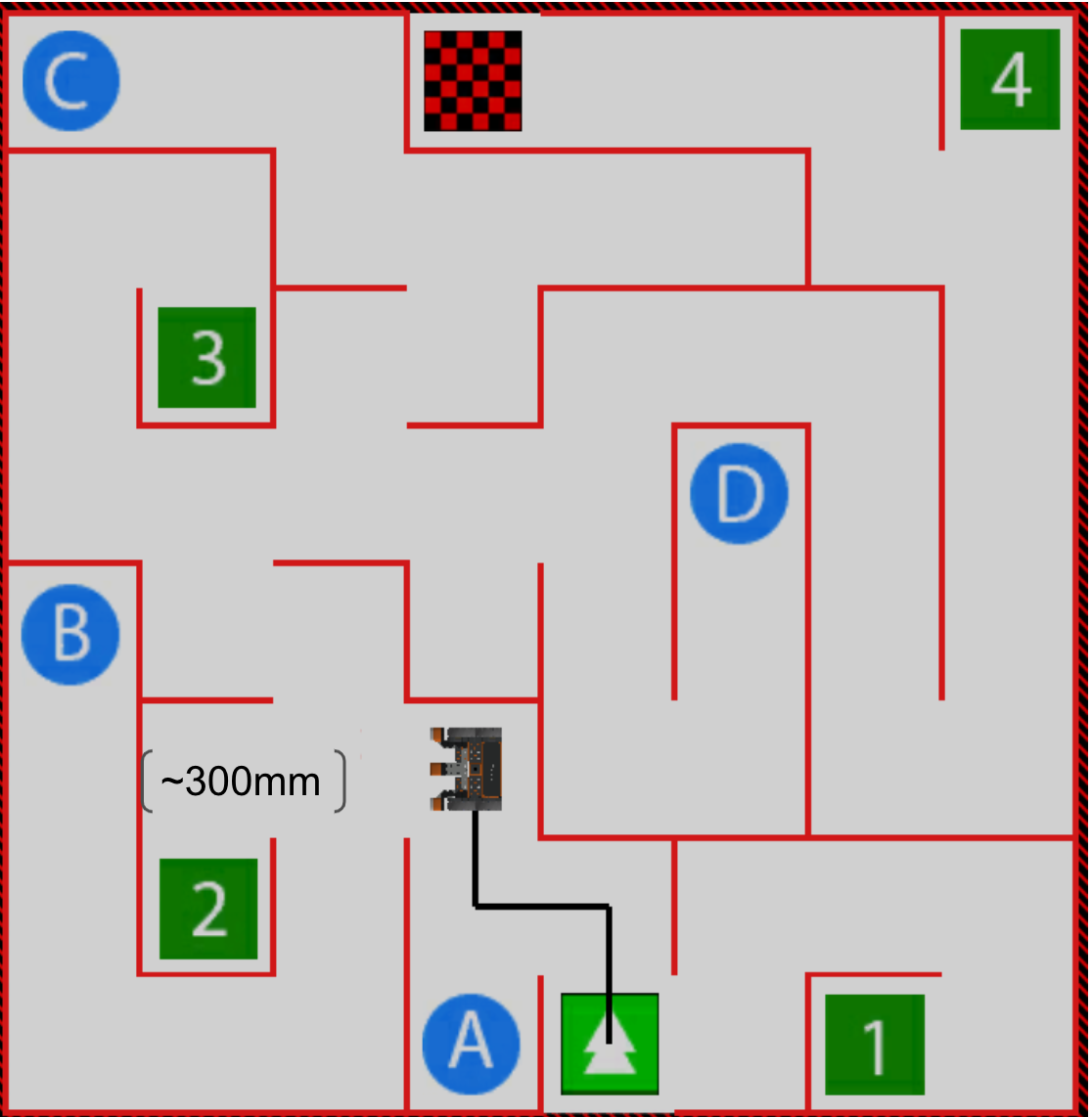
أضف الأوامر التالية إلى مشروعك، بعد آخر turn_for أمر. تأكد من أن المسافة البادئة للحلقات بينما تتطابق مع تلك الموجودة في المشروع. يمكنك النسخ واللصق من أو إلى مشروعك الحالي، أو كتابتها في مساحة العمل.
بينما front_distance.get_distance(MM) > 50: drivetrain.drive(للأمام) انتظر(5، مللي ثانية) drivetrain.turn_for(يسار، 90، درجة) - يمكننا تقدير المسافة من الجدار المجاور إلى موقع الدوران المطلوب في المتاهة، بحوالي 300 ملليمتر (مم).
لمعلوماتك
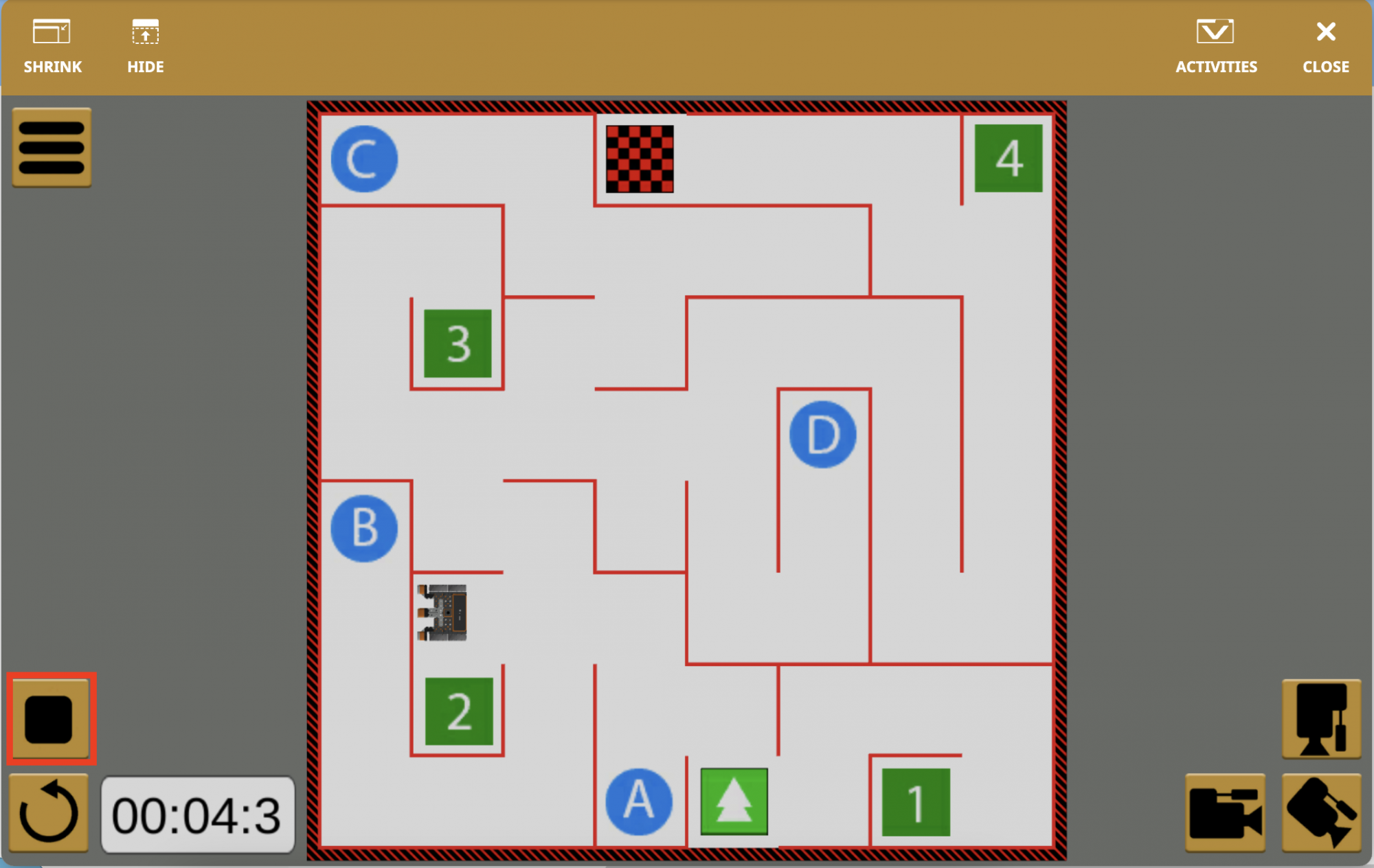
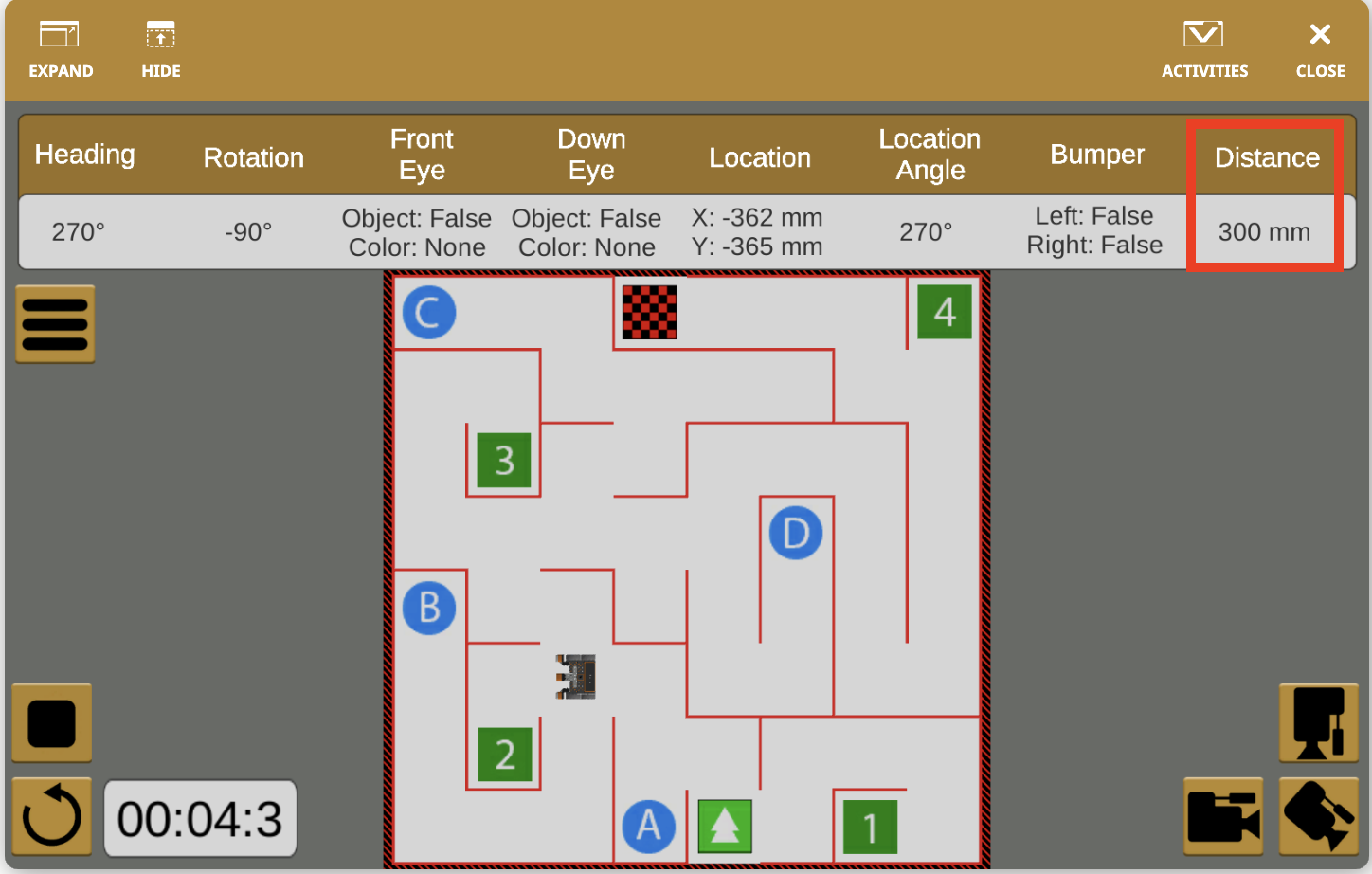
يمكنك استخدام بيانات مستشعر المسافة كما هو موضح في لوحة المعلومات لتقدير المسافة التي يبعدها روبوت الواقع الافتراضي عن الكائن. أوقف مشروعك عندما يصل روبوت الواقع الافتراضي إلى الموقع الذي تريده. بمجرد إيقافها، ستعرض القيم الموجودة في لوحة المعلومات قيم المستشعر لروبوت الواقع الافتراضي حيث يتم وضعه حاليًا. يمكن استخدام هذا لمراقبة قيم المستشعر بالإضافة إلى تصور المسافة بين روبوت الواقع الافتراضي وجسم ما في وقت معين.
يتيح لك إيقاف المشروع عندما يصل روبوت الواقع
الافتراضي إلى نقطة محددة إيقاف المشروع مؤقتًا لمعرفة القيمة التي يبلغ عنها مستشعر المسافة في الوقت
الفعلي. في حالة متاهة الجدار، يمكن استخدام هذه القيمة في المشغل الأكبر من>() لجعل
روبوت الواقع الافتراضي يتوقف على مسافة أبعد من الجدار.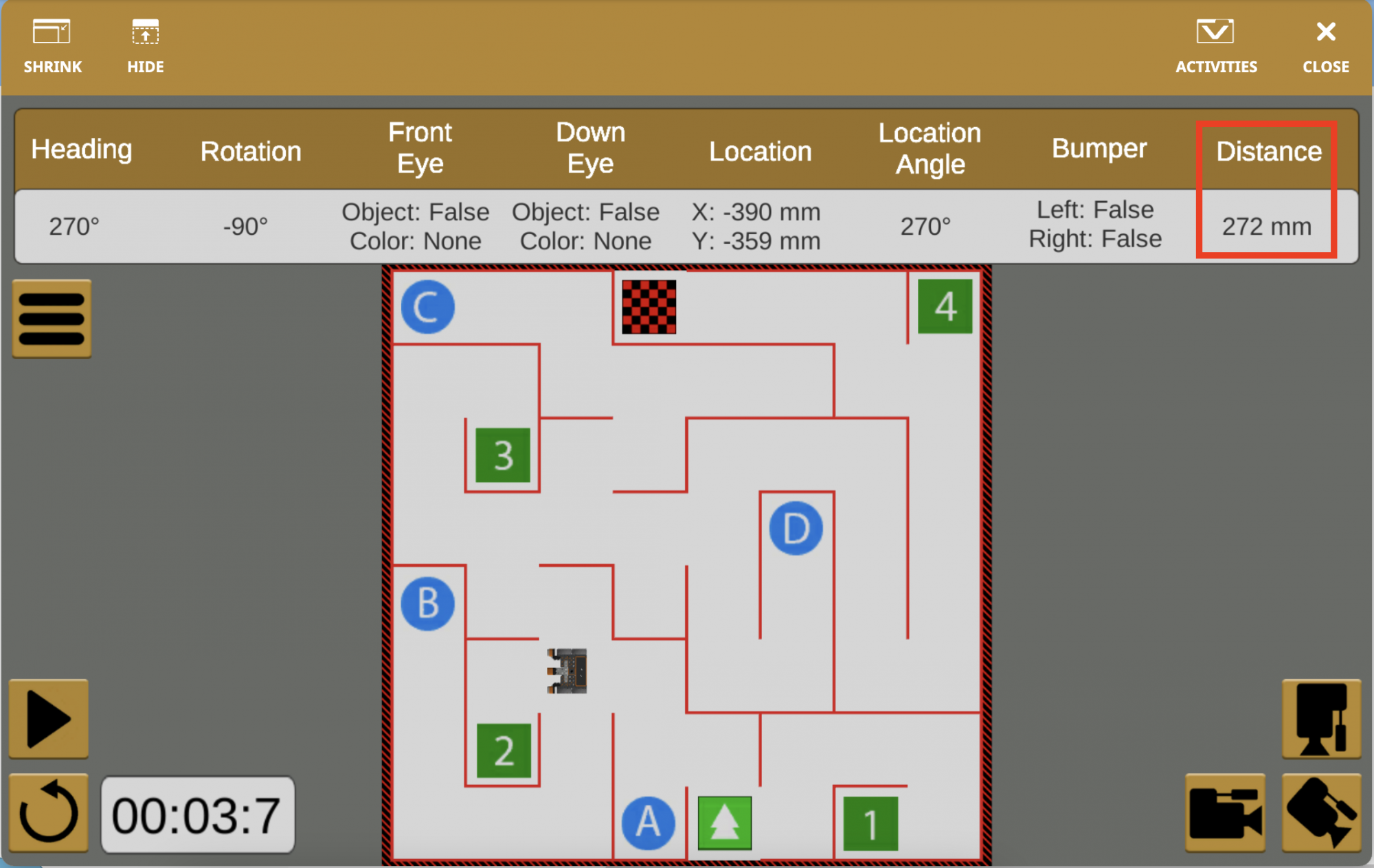
-
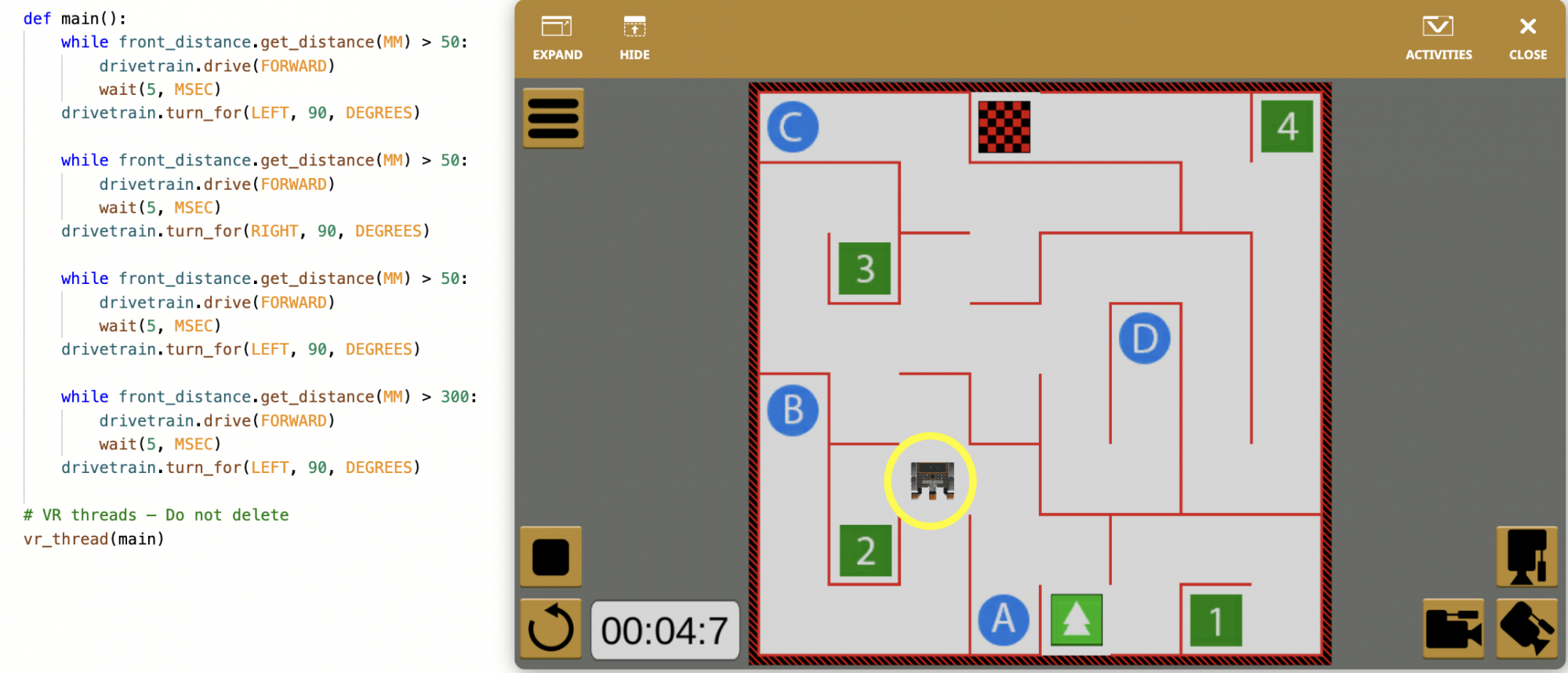
اضبط القيمة في عامل مقارنة الحلقة النهائية إلى 300 ملليمتر (مم)، كما هو موضح أدناه. سيمكن هذا روبوت الواقع الافتراضي من التقدم للأمام بينما تكون المسافة إلى الجدار أكبر من 300 ملليمتر. عندما يكون أقل من 300 ملليمتر، سينعطف روبوت الواقع الافتراضي يسارًا، في موقع الانعطاف المطلوب في متاهة الحائط.
بينما front_distance.get_distance(MM) > 300: drivetrain.drive(للأمام) انتظر(5، مللي ثانية) drivetrain.turn_for(يسار، 90، درجة) - قم بتشغيل ملعب المتاهة الجدارية إذا لم يكن مفتوحًا بالفعل وقم بتشغيل
المشروع. لاحظ كيف يتحول روبوت الواقع الافتراضي إلى اليسار في موقع الدوران المطلوب، بحيث يكون جاهزًا
للاستمرار عبر المتاهة إلى الحرف "B".
- بعد ذلك، أضف الأوامر التالية إلى مشروعك، بعد turn_for الأمر النهائي، حتى يستمر روبوت الواقع الافتراضي في طريقه إلى الحرف "B". تأكد من وضع المسافة البادئة لحلقات WHE بشكل صحيح.
-
بينما front_distance.get_distance(MM) > 50: drivetrain.drive(للأمام) انتظر(5، مللي ثانية) drivetrain.turn_for(لليمين، 90، درجة) بينما front_distance.get_distance(MM) > 50: drivetrain.drive(للأمام) انتظر(5، مللي ثانية ) drivetrain.turn_for (لليمين، 90، درجة) بينما front_distance.get_distance(MM) > 50: drivetrain.drive(للأمام) انتظر(5، مللي ثانية ) drivetrain.stop () -
قم بتشغيل Wall Maze Playground إذا لم يكن مفتوحًا بالفعل وقم بتشغيل المشروع مرة أخرى.

- يتحرك روبوت الواقع الافتراضي الآن من بداية ملعب المتاهة الجدارية ويتوقف عند الحرف "B".
- لاحظ أن تغيير المعامل الأيمن إلى 300 ملليمتر سمح لروبوت الواقع الافتراضي بالدوران على مسافة أبعد من الجدار، وهو أمر ضروري للدوران في الموقع الصحيح.
- يمكن استخدام قيمة المسافة المبلغ عنها في لوحة المعلومات لمراقبة مدى بعد روبوت الواقع الافتراضي عن
الحائط عندما يحتاج إلى التحول للوصول إلى الحرف "B".
قم باختيار الزر التالي لمواصلة بقية هذا الدرس.