
പാഠം 3: കൂടുതൽ ദൂരത്തേക്ക് തിരിയൽ
ടേണിംഗ് ലൊക്കേഷനിലേക്ക് നാവിഗേറ്റ് ചെയ്യുന്നു
-
അവസാനത്തെ turn_for കമാൻഡിന് ശേഷം, നിങ്ങളുടെ പ്രോജക്റ്റിലേക്ക് ഇനിപ്പറയുന്ന കമാൻഡുകൾ ചേർക്കുക. ലൂപ്പുകളുടെയും ഇൻഡന്റേഷൻ പ്രോജക്റ്റിലുള്ളവയുമായി പൊരുത്തപ്പെടുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക. നിങ്ങളുടെ നിലവിലുള്ള പ്രോജക്റ്റിലേക്ക് പകർത്തി ഒട്ടിക്കാം, അല്ലെങ്കിൽ വർക്ക്സ്പെയ്സിൽ ടൈപ്പ് ചെയ്യാം.
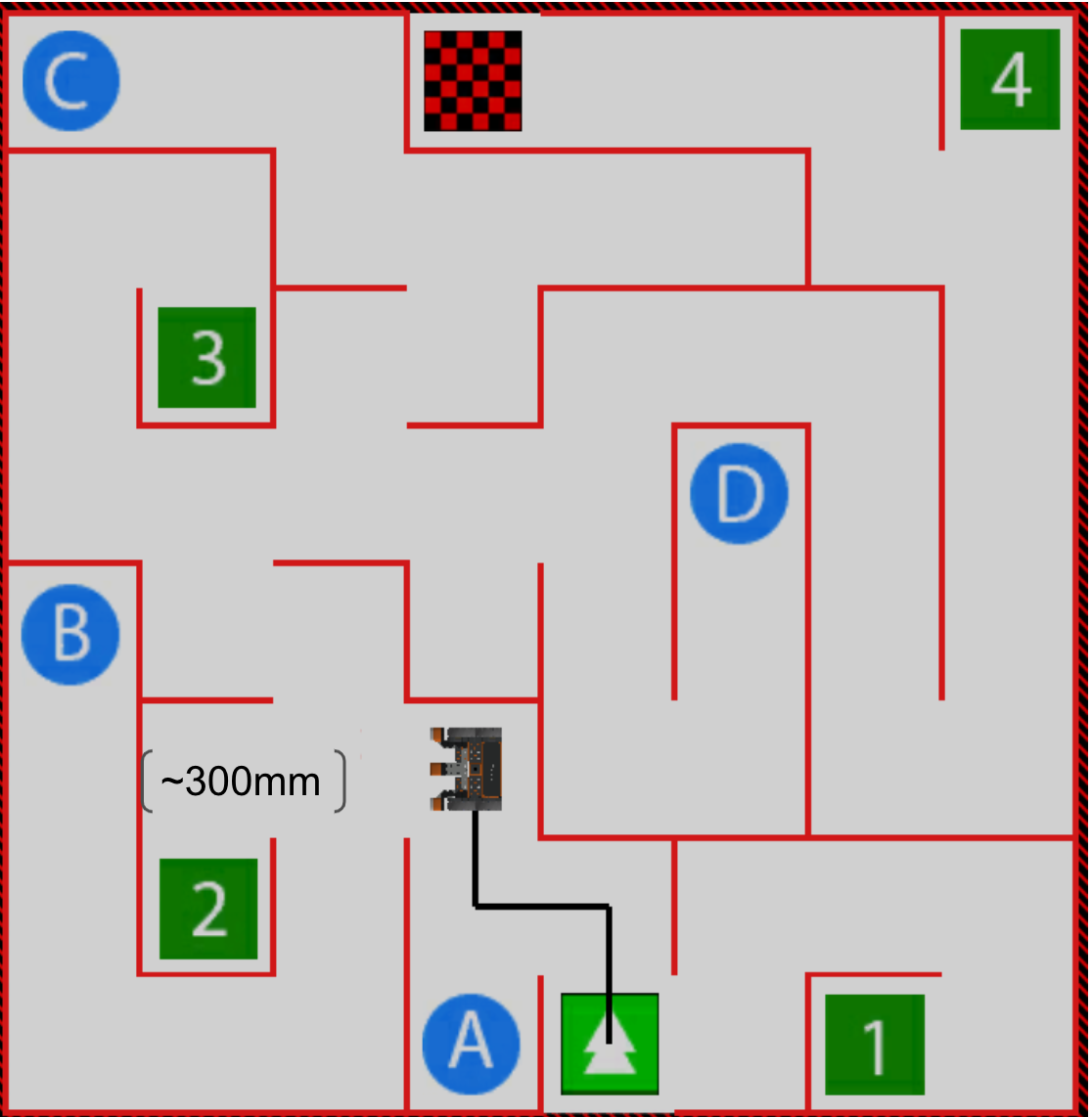
front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - അടുത്ത ഭിത്തിയിൽ നിന്ന് മസിലിലെ നമ്മുടെ ആവശ്യമുള്ള തിരിയുന്ന സ്ഥലത്തേക്കുള്ള ദൂരം ഏകദേശം 300 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) ആണെന്ന് നമുക്ക് കണക്കാക്കാം.
നിങ്ങളുടെ അറിവിലേക്കായി
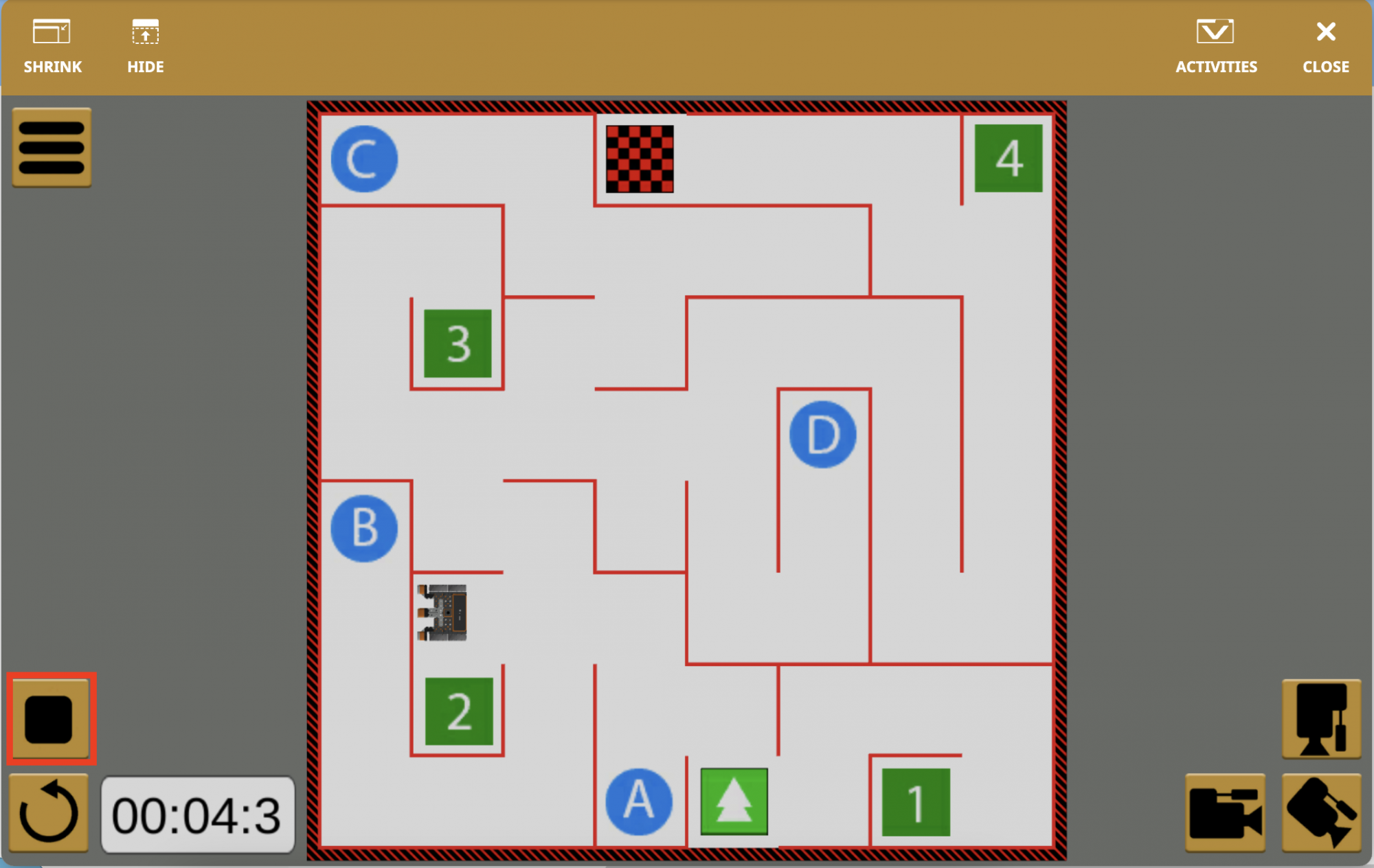
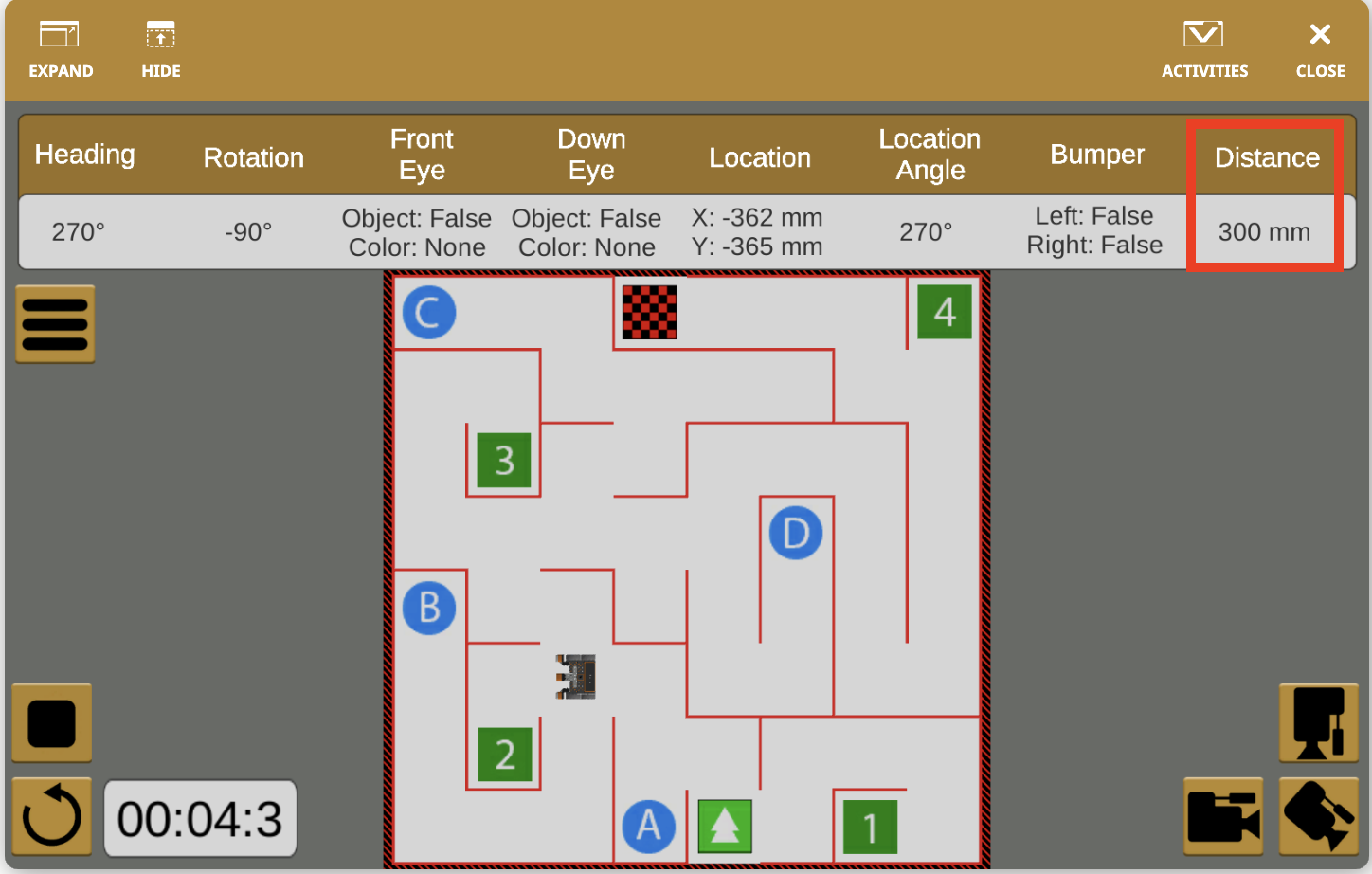
ഡാഷ്ബോർഡിൽ റിപ്പോർട്ട് ചെയ്തിരിക്കുന്നതുപോലെ ഡിസ്റ്റൻസ് സെൻസർ ഡാറ്റ ഉപയോഗിച്ച് ഒരു വസ്തുവിൽ നിന്ന് VR റോബോട്ട് എത്ര ദൂരം ഉണ്ടെന്ന് കണക്കാക്കാം. വിആർ റോബോട്ട് നിങ്ങൾ ആഗ്രഹിക്കുന്ന സ്ഥലത്ത് എത്തുമ്പോൾ നിങ്ങളുടെ പ്രോജക്റ്റ് നിർത്തുക. നിർത്തിക്കഴിഞ്ഞാൽ, ഡാഷ്ബോർഡിലെ മൂല്യങ്ങൾ VR റോബോട്ടിന്റെ സെൻസർ മൂല്യങ്ങൾ അത് നിലവിൽ എവിടെ സ്ഥാപിച്ചിരിക്കുന്നുവോ അവിടെ പ്രദർശിപ്പിക്കും. ഇത് സെൻസർ മൂല്യങ്ങൾ നിരീക്ഷിക്കുന്നതിനും ഒരു നിശ്ചിത സമയത്ത് വിആർ റോബോട്ടും ഒരു വസ്തുവും തമ്മിലുള്ള ദൂരം ദൃശ്യവൽക്കരിക്കുന്നതിനും ഉപയോഗിക്കാം.
VR റോബോട്ട് ഒരു പ്രത്യേക പോയിന്റിൽ എത്തുമ്പോൾ പ്രോജക്റ്റ് നിർത്തുന്നത്, ദൂര സെൻസർ തത്സമയം എന്ത് മൂല്യം റിപ്പോർട്ട് ചെയ്യുന്നുവെന്ന് കാണാൻ പ്രോജക്റ്റ് താൽക്കാലികമായി നിർത്താൻ നിങ്ങളെ പ്രാപ്തമാക്കുന്നു. വാൾ മെയ്സിന്റെ കാര്യത്തിൽ, (>) ത്തിൽ കൂടുതൽ വലുതായ ഓപ്പറേറ്ററിൽ ഈ മൂല്യം ഉപയോഗിച്ച് VR റോബോട്ടിനെ ഭിത്തിയിൽ നിന്ന് കൂടുതൽ അകലെ നിർത്താൻ കഴിയും.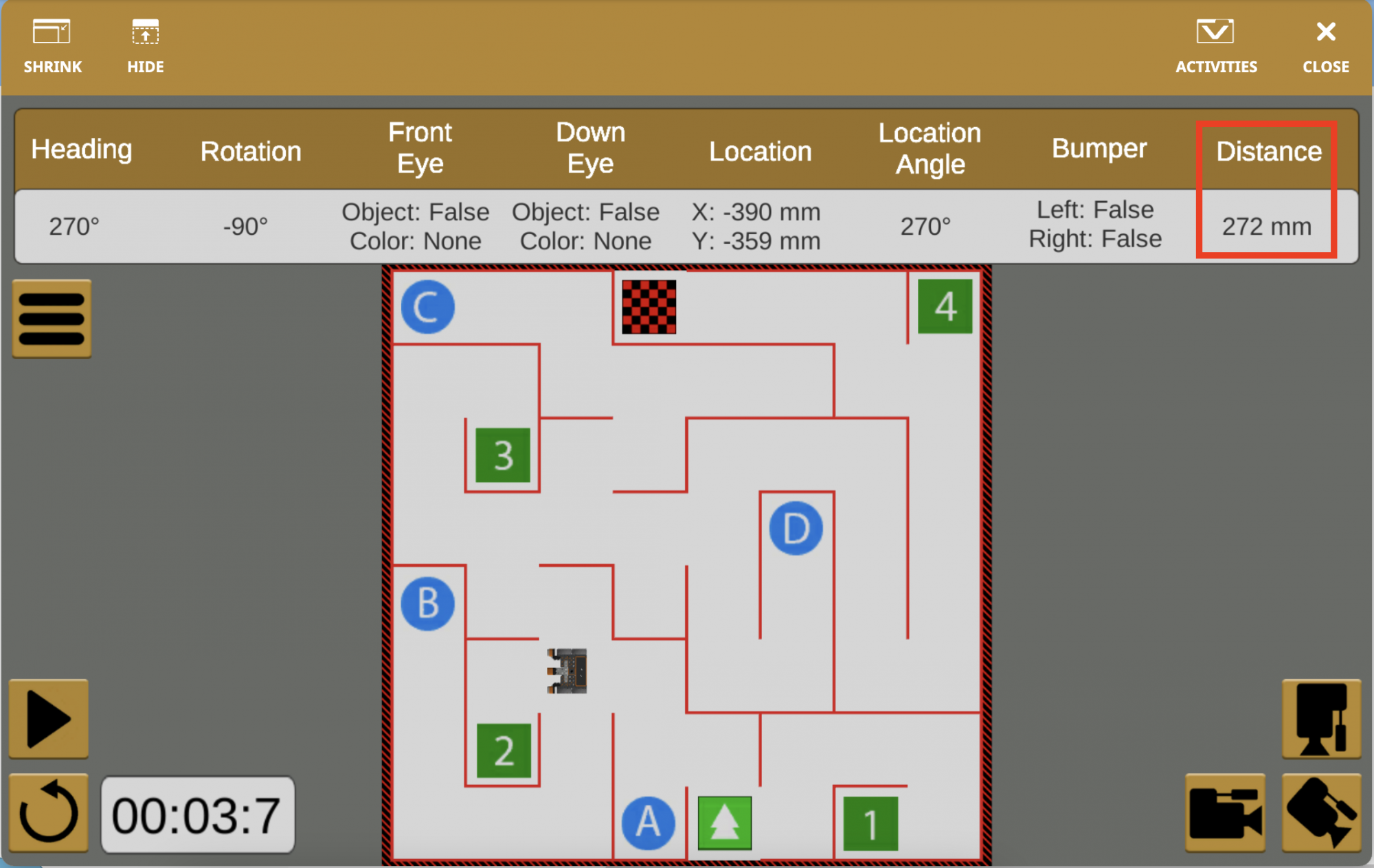
-
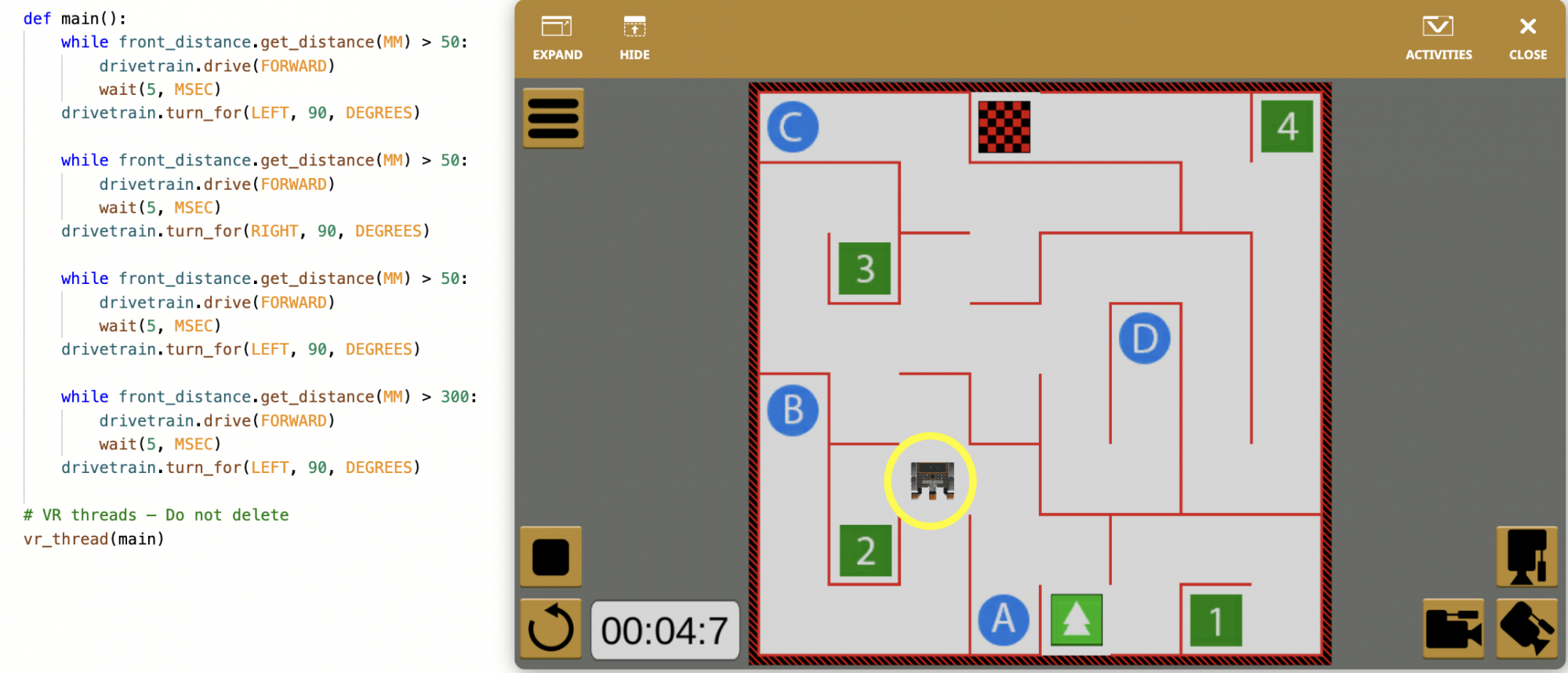
താഴെ കാണിച്ചിരിക്കുന്നതുപോലെ, അവസാന while ലൂപ്പ് താരതമ്യ ഓപ്പറേറ്ററിലെ മൂല്യം 300 മില്ലിമീറ്ററായി (mm) ക്രമീകരിക്കുക. ഇത് ഭിത്തിയിലേക്കുള്ള ദൂരം 300 മില്ലിമീറ്ററിൽ കൂടുതലായിരിക്കുമ്പോൾ വിആർ റോബോട്ടിനെ മുന്നോട്ട് ഓടിക്കാൻ പ്രാപ്തമാക്കും. 300 മില്ലിമീറ്ററിൽ താഴെയാകുമ്പോൾ, VR റോബോട്ട് വാൾ മെയ്സിലെ ആവശ്യമുള്ള ടേണിംഗ് ലൊക്കേഷനിൽ ഇടത്തേക്ക് തിരിയും.
front_distance.get_distance(MM) > 300: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട്തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിച്ച് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക. ആവശ്യമുള്ള തിരിയുന്ന സ്ഥലത്ത് VR റോബോട്ട് ഇടത്തേക്ക് തിരിയുന്നത് ശ്രദ്ധിക്കുക, അങ്ങനെ അത് 'B' എന്ന അക്ഷരത്തിലേക്കുള്ള മസിലിലൂടെ തുടരാൻ തയ്യാറാകും.
- അടുത്തതായി, അവസാനത്തെ turn_for കമാൻഡിന് ശേഷം, നിങ്ങളുടെ പ്രോജക്റ്റിലേക്ക് ഇനിപ്പറയുന്ന കമാൻഡുകൾ ചേർക്കുക, അങ്ങനെ VR റോബോട്ട് 'B' എന്ന അക്ഷരത്തിലേക്കുള്ള പാതയിൽ തുടരും. ഉം ലൂപ്പുകൾ ശരിയായി ഇൻഡന്റ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
-
front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(RIGHT, 90, DEGREES) while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(RIGHT, 90, DEGREES) while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() -
വാൾ മേസ് പ്ലേഗ്രൗണ്ട് തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിച്ച് പ്രോജക്റ്റ് വീണ്ടും പ്രവർത്തിപ്പിക്കുക.

- വിആർ റോബോട്ട് ഇപ്പോൾ വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട് തുടക്കം മുതൽ ഡ്രൈവ് ചെയ്ത് 'B' എന്ന അക്ഷരത്തിൽ നിർത്തുന്നു.
- വലത് ഓപ്പറാൻഡ് 300 മില്ലിമീറ്ററിലേക്ക് മാറ്റിയത് VR റോബോട്ടിനെ ചുവരിൽ നിന്ന് കൂടുതൽ ദൂരം തിരിയാൻ അനുവദിച്ചു, അത് ശരിയായ സ്ഥലത്ത് തിരിയേണ്ടത് അത്യാവശ്യമായിരുന്നു.
- 'B' എന്ന അക്ഷരത്തിലെത്താൻ തിരിയേണ്ടിവരുമ്പോൾ VR റോബോട്ട് ഒരു മതിലിൽ നിന്ന് എത്ര ദൂരെയായിരുന്നുവെന്ന് നിരീക്ഷിക്കാൻ ഡാഷ്ബോർഡിൽ റിപ്പോർട്ട് ചെയ്തിരിക്കുന്ന ദൂര മൂല്യം ഉപയോഗിക്കാം.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.