
บทเรียนที่ 3: การหันไปในระยะทางที่ไกลขึ้น
การนำทางไปยังตำแหน่งเลี้ยว
-
เพิ่มคำสั่งต่อไปนี้ลงในโปรเจ็กต์ของคุณ หลังจากคำสั่ง turn_for สุดท้าย ตรวจสอบให้แน่ใจว่าการเยื้องของลูป ขณะที่ ตรงกับที่ใช้ในโครงการ คุณสามารถคัดลอกและวางลงในหรือจากโครงการที่มีอยู่ของคุณหรือพิมพ์ลงในพื้นที่ทำงาน
ในขณะที่ front_distance.get_distance (MM) > 50 : drivetrain.drive (ไปข้างหน้า) รอ (5, มิลลิวินาที ) drivetrain.turn_for (ซ้าย, 90, องศา) - เราสามารถประเมินได้ว่าระยะห่างจากผนังถัดไปถึงตำแหน่งเลี้ยวที่เราต้องการในเขาวงกตคือประมาณ 300 มิลลิเมตร (มม.)

สำหรับข้อมูลของคุณ
คุณสามารถใช้ข้อมูลเซ็นเซอร์ระยะทางตามที่รายงานในแดชบอร์ดเพื่อประเมินระยะทางที่หุ่นยนต์ VR อยู่จากวัตถุ หยุดโครงการของคุณเมื่อ VR Robot ไปถึงตำแหน่งที่คุณต้องการ เมื่อหยุดแล้วค่าในแดชบอร์ดจะแสดงค่าเซ็นเซอร์สำหรับหุ่นยนต์ VR ที่อยู่ในตำแหน่งปัจจุบัน สิ่งนี้สามารถใช้เพื่อสังเกตค่าเซ็นเซอร์เช่นเดียวกับการมองเห็นระยะห่างระหว่างหุ่นยนต์ VR และวัตถุในช่วงเวลาหนึ่ง
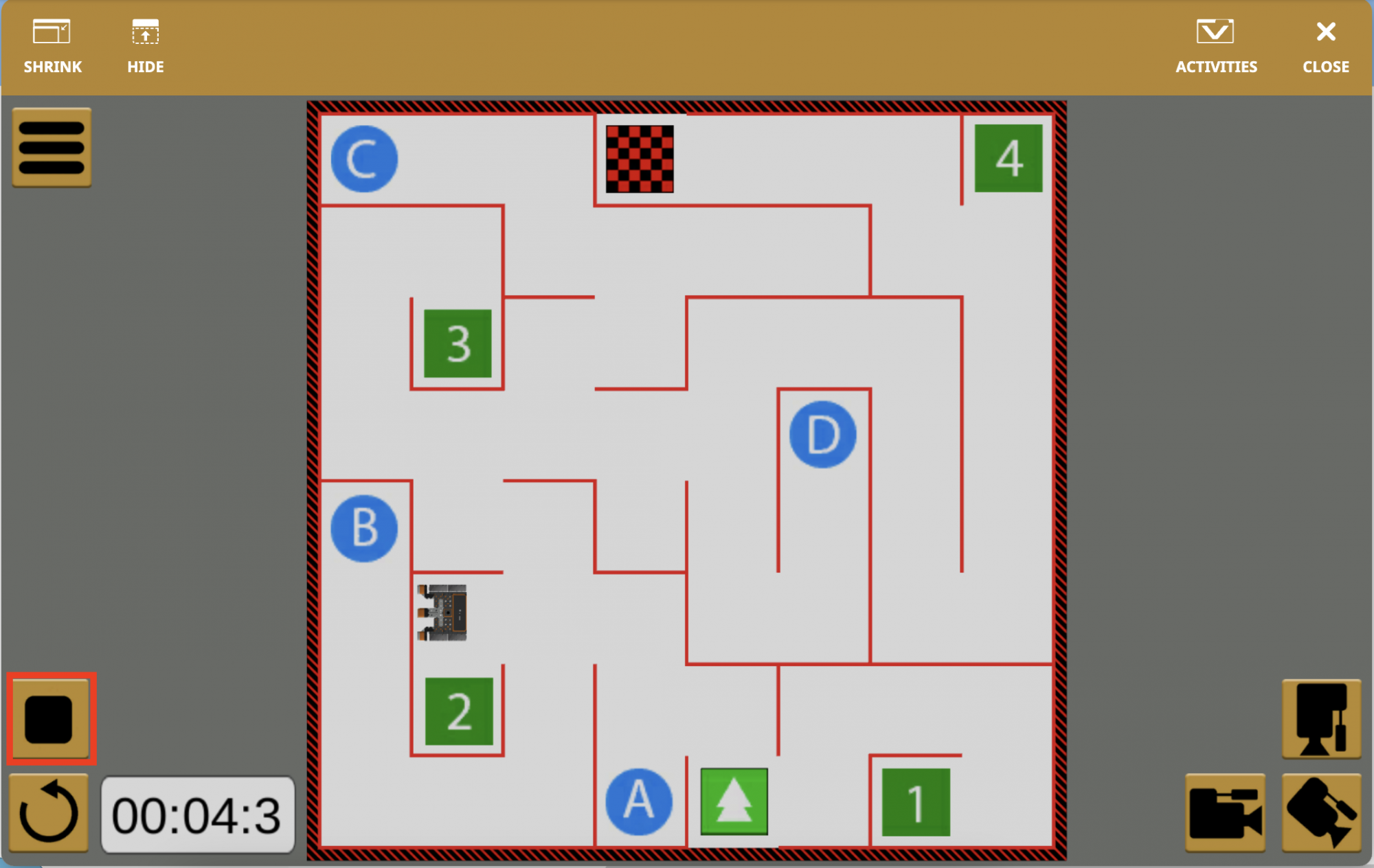
การหยุดโครงการเมื่อ VR Robot ไปถึง จุดที่กำหนดช่วยให้คุณสามารถหยุดโครงการชั่วคราวเพื่อดูว่าค่าใดที่เซ็นเซอร์ระยะทางกำลังรายงานแบบเรียลไทม์ ในกรณีของ Wall Maze ค่านี้สามารถใช้ในตัวดำเนินการที่มากกว่า>() เพื่อทำให้ VR Robot หยุดที่ระยะห่างจากผนังมากขึ้น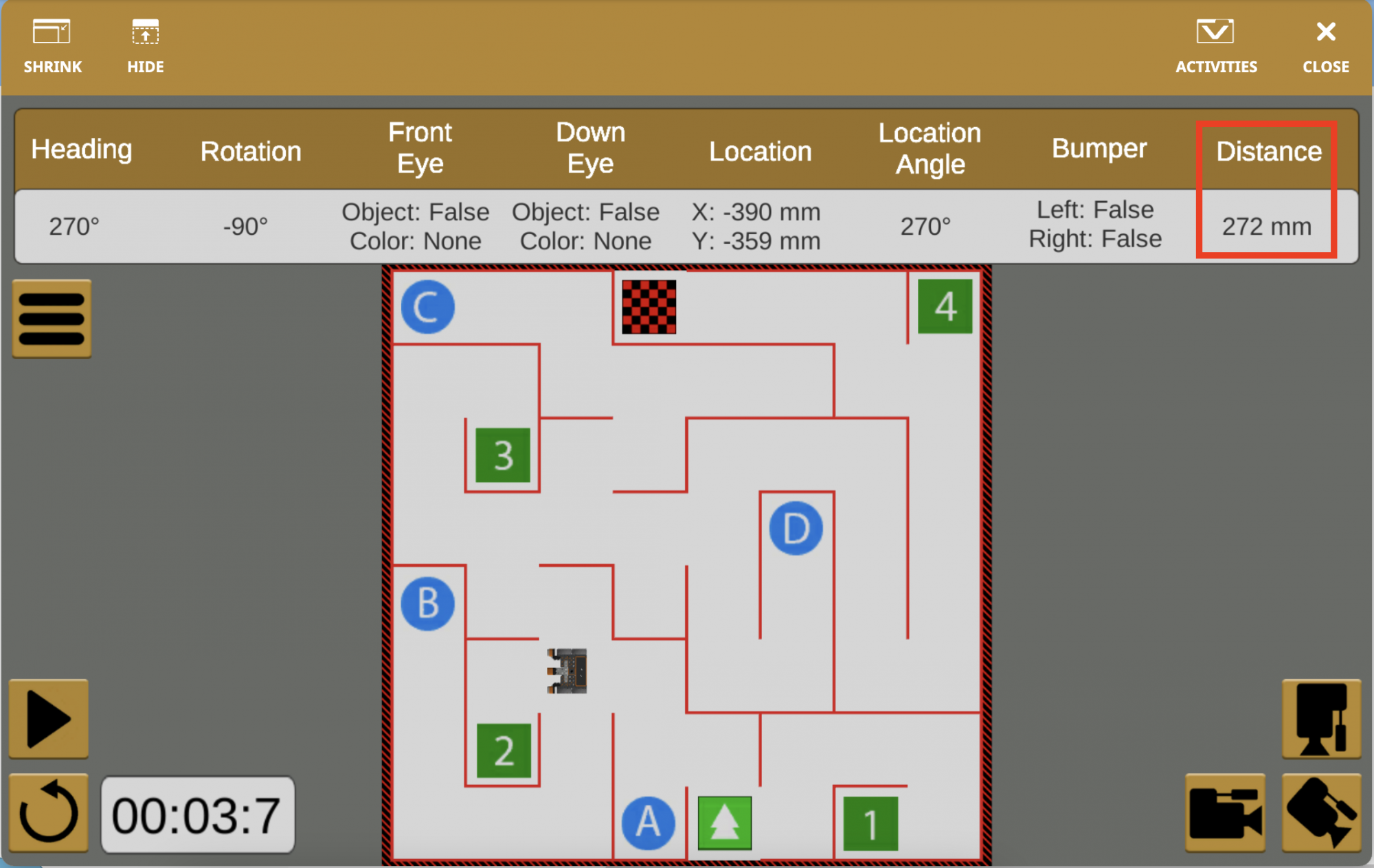
-
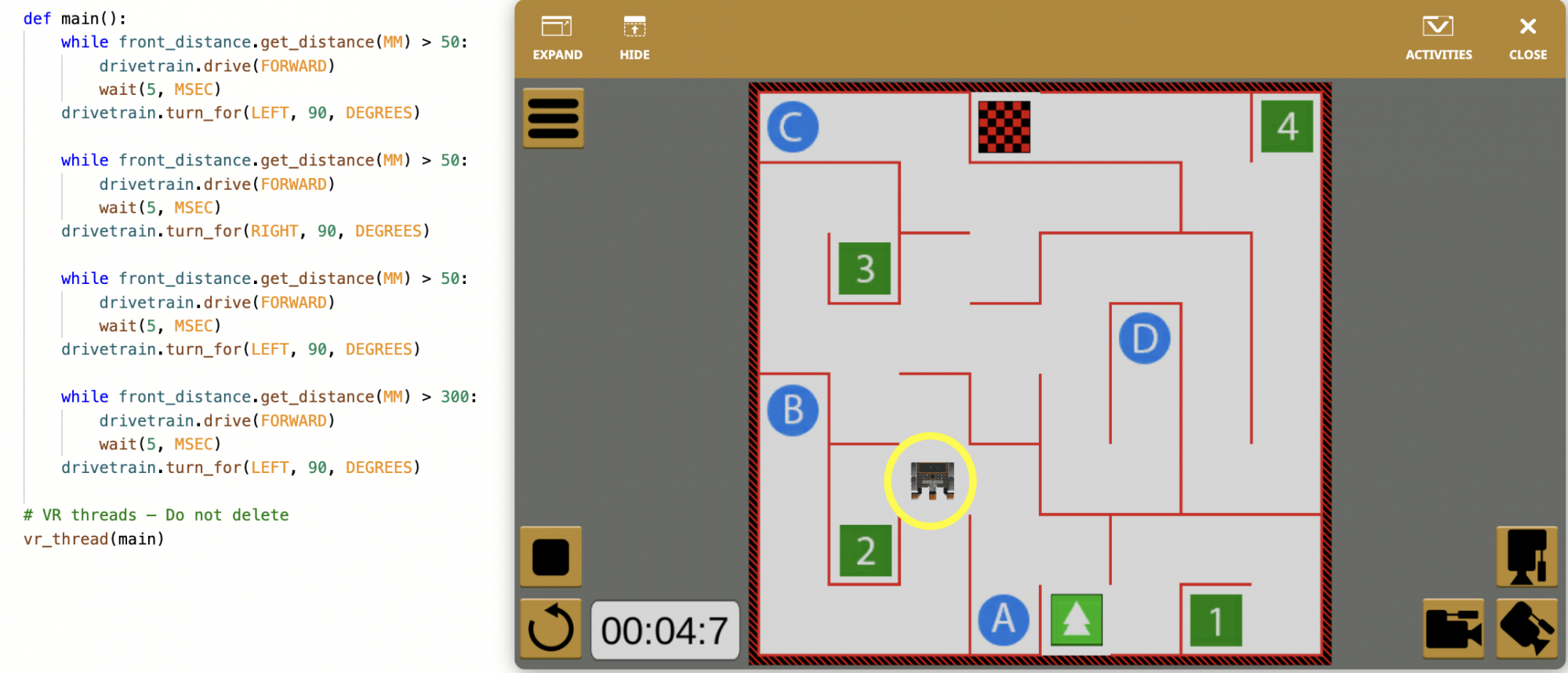
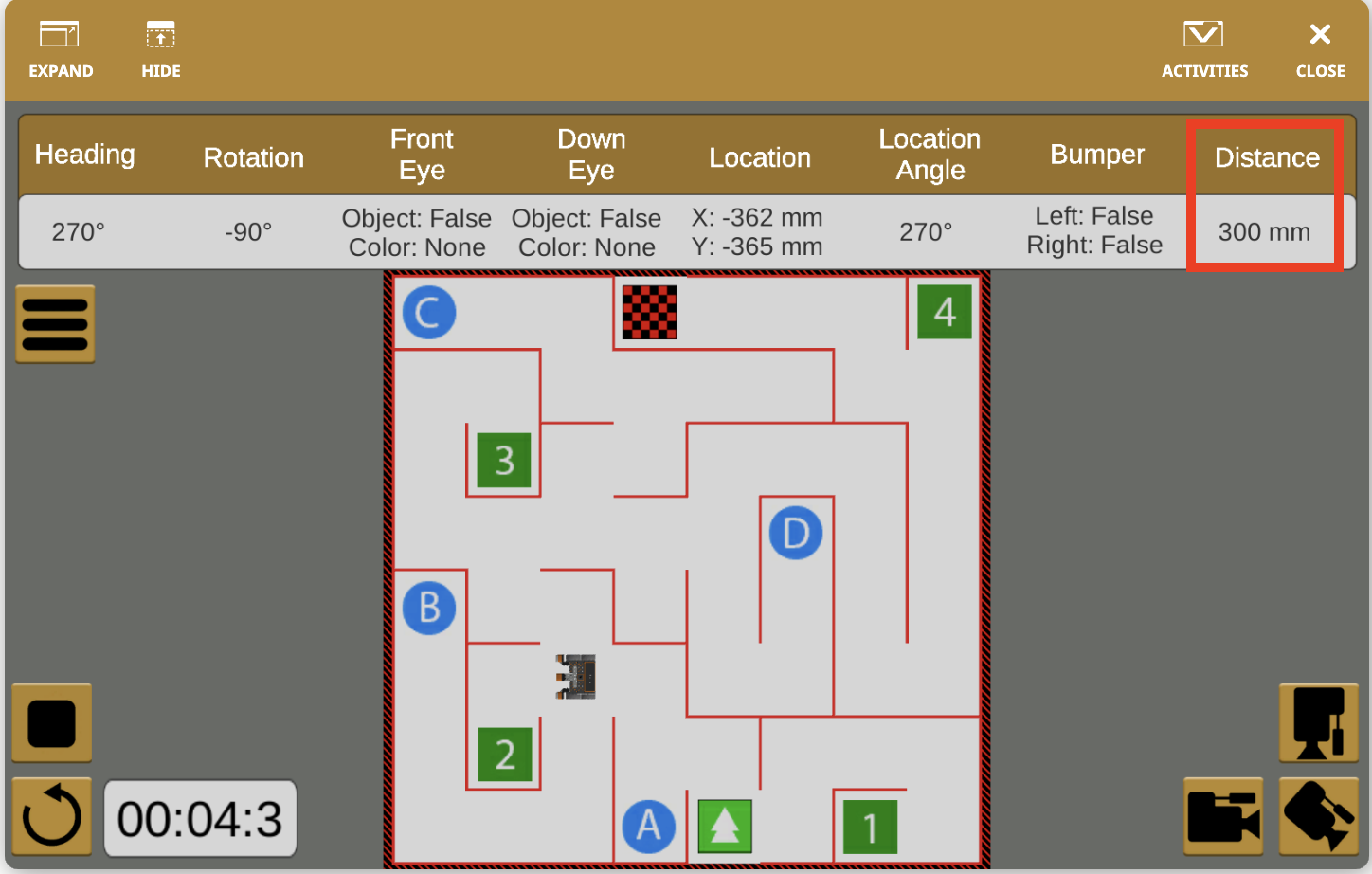
ปรับค่าในขั้นสุดท้ายใน ขณะที่ตัวดำเนินการเปรียบเทียบ ลูปเป็น 300 มิลลิเมตร (มม.) ตามที่แสดงด้านล่าง สิ่งนี้จะช่วยให้หุ่นยนต์ VR สามารถขับเคลื่อนไปข้างหน้าได้ในขณะที่ระยะห่างจากผนังมากกว่า 300 มิลลิเมตร เมื่อมีขนาดน้อยกว่า 300 มิลลิเมตรหุ่นยนต์ VR จะเลี้ยวซ้ายตามตำแหน่งการเลี้ยวที่ต้องการใน Wall Maze
ในขณะที่ front_distance.get_distance (MM) > 300 : drivetrain.drive (ไปข้างหน้า) รอ (5, มิลลิวินาที ) drivetrain.turn_for (ซ้าย, 90, องศา) - เปิด Wall Maze Playground หากยังไม่ได้เปิดและดำเนินโครงการ สังเกตว่าหุ่นยนต์ VR เลี้ยวซ้ายที่ตำแหน่งเลี้ยวที่ต้องการอย่างไรเพื่อให้พร้อมที่จะผ่านเขาวงกตไปยังตัวอักษร 'B' ต่อไป
- ขั้นตอนต่อไป ให้เพิ่มคำสั่งต่อไปนี้ลงในโปรเจ็กต์ของคุณ หลังจากคำสั่งสุดท้าย turn_for เพื่อให้หุ่นยนต์ VR ยังคงเดินทางต่อไปยังตัวอักษร 'B' ตรวจสอบให้แน่ใจว่าระยะห่าง ระหว่างการ วนลูปเยื้องอย่างถูกต้อง
-
ในขณะที่ front_distance.get_distance (MM) > 50 : drivetrain.drive (ไปข้างหน้า) รอ (5, มิลลิวินาที ) drivetrain.turn_for (ขวา, 90, องศา) ใน ขณะที่ front_distance.get_distance (MM) > 50 : drivetrain.drive (ไปข้างหน้า) รอ (5, มิลลิวินาที ) drivetrain.turn_for (ขวา, 90, องศา) ใน ขณะที่ front_distance.get_distance (MM) > 50: drivetrain.drive (ไปข้างหน้า) รอ (5, มิลลิวินาที) drivetrain.stop () -
เปิด Wall Maze Playground หากยังไม่เปิดและเรียกใช้โครงการอีกครั้ง

- ตอนนี้หุ่นยนต์ VR ขับเคลื่อนจากจุดเริ่มต้นของ Wall Maze Playground และหยุดบนตัวอักษร ‘B’
- โปรดสังเกตว่าการเปลี่ยนโอเปอเร เตอร์ที่เหมาะสมเป็น 300 มิลลิเมตรทำให้หุ่นยนต์ VR สามารถหมุนได้ในระยะที่ไกลจากผนังซึ่งจำเป็นต้องหมุนในตำแหน่งที่ถูกต้อง
- ค่าระยะทางที่รายงานในแดชบอร์ดสามารถ ใช้เพื่อสังเกตระยะทางที่หุ่นยนต์ VR อยู่ห่างจากกำแพงเมื่อจำเป็นต้องหันไปที่ตัวอักษร ‘B'
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป