
Bài 3: Quay ở khoảng cách xa hơn
Điều hướng đến vị trí rẽ
-
Thêm các lệnh sau vào dự án của bạn, sau lệnh turn_for cuối cùng. Đảm bảo rằng khoảng thụt lề của vòng lặp while khớp với khoảng thụt lề trong dự án. Bạn có thể sao chép và dán vào hoặc từ dự án hiện tại của mình hoặc nhập chúng vào Không gian làm việc.
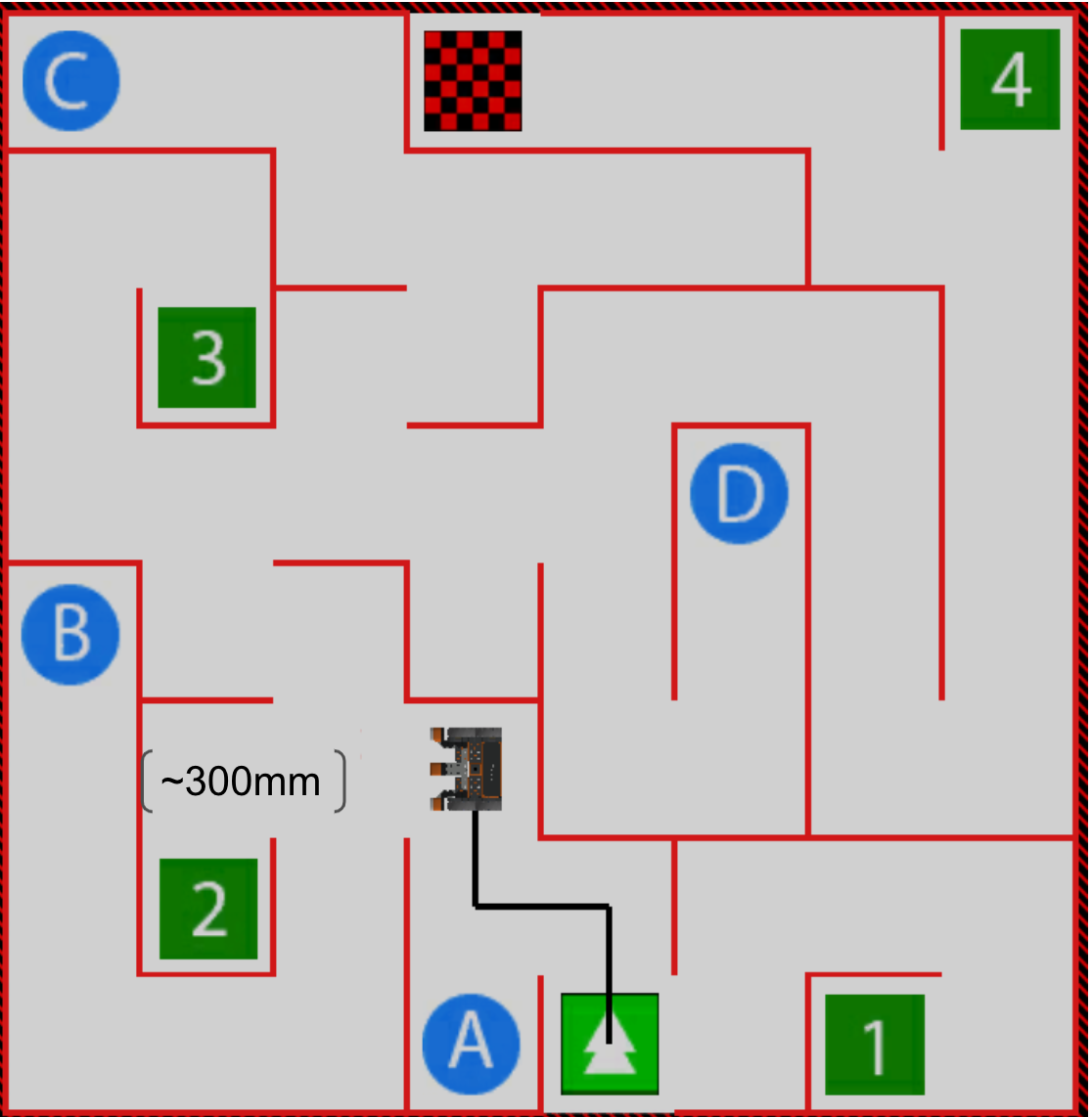
trong khi front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - Chúng ta có thể ước tính khoảng cách từ bức tường tiếp theo đến vị trí rẽ mong muốn trong mê cung là khoảng 300 milimét (mm).
Để bạn biết
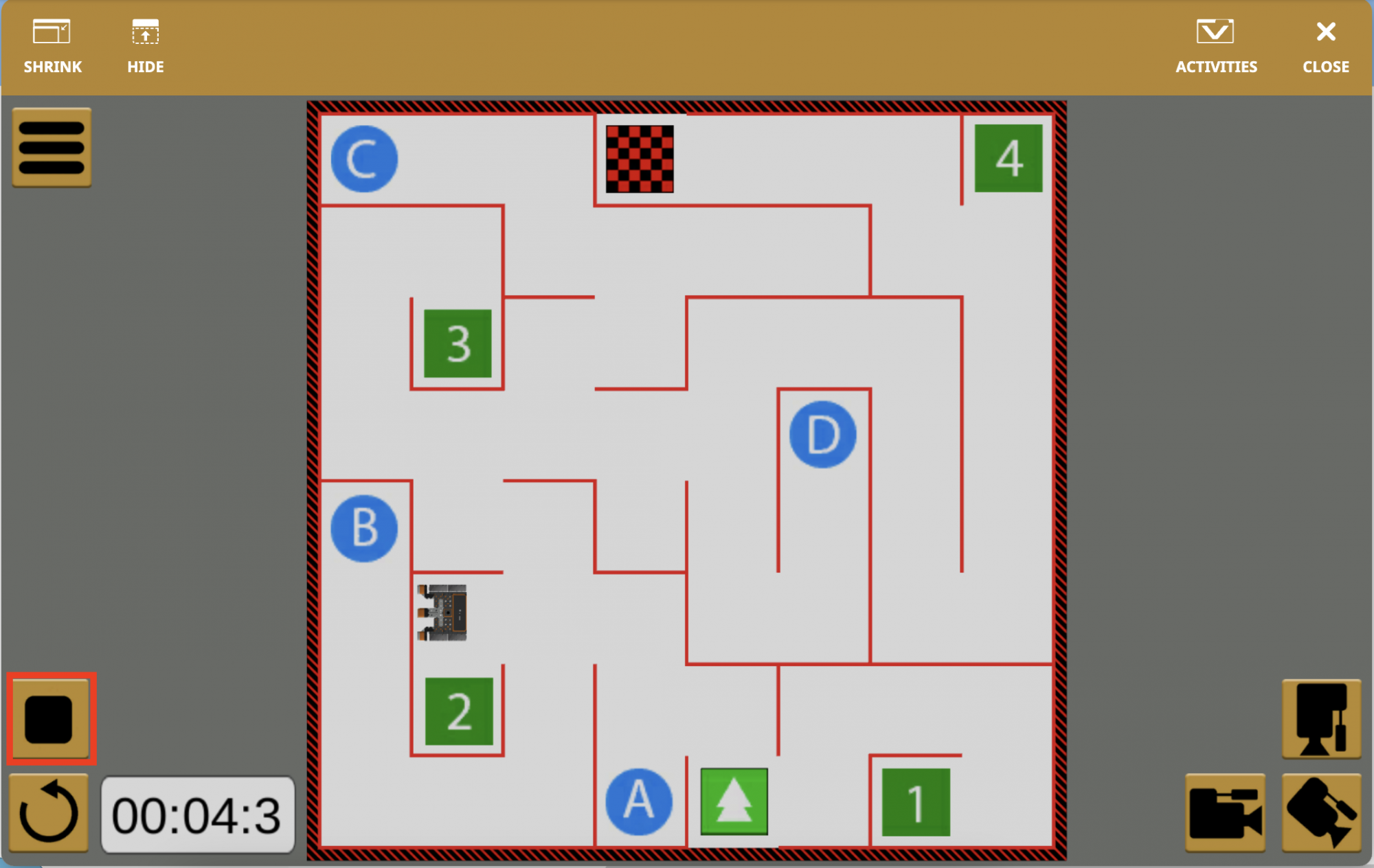
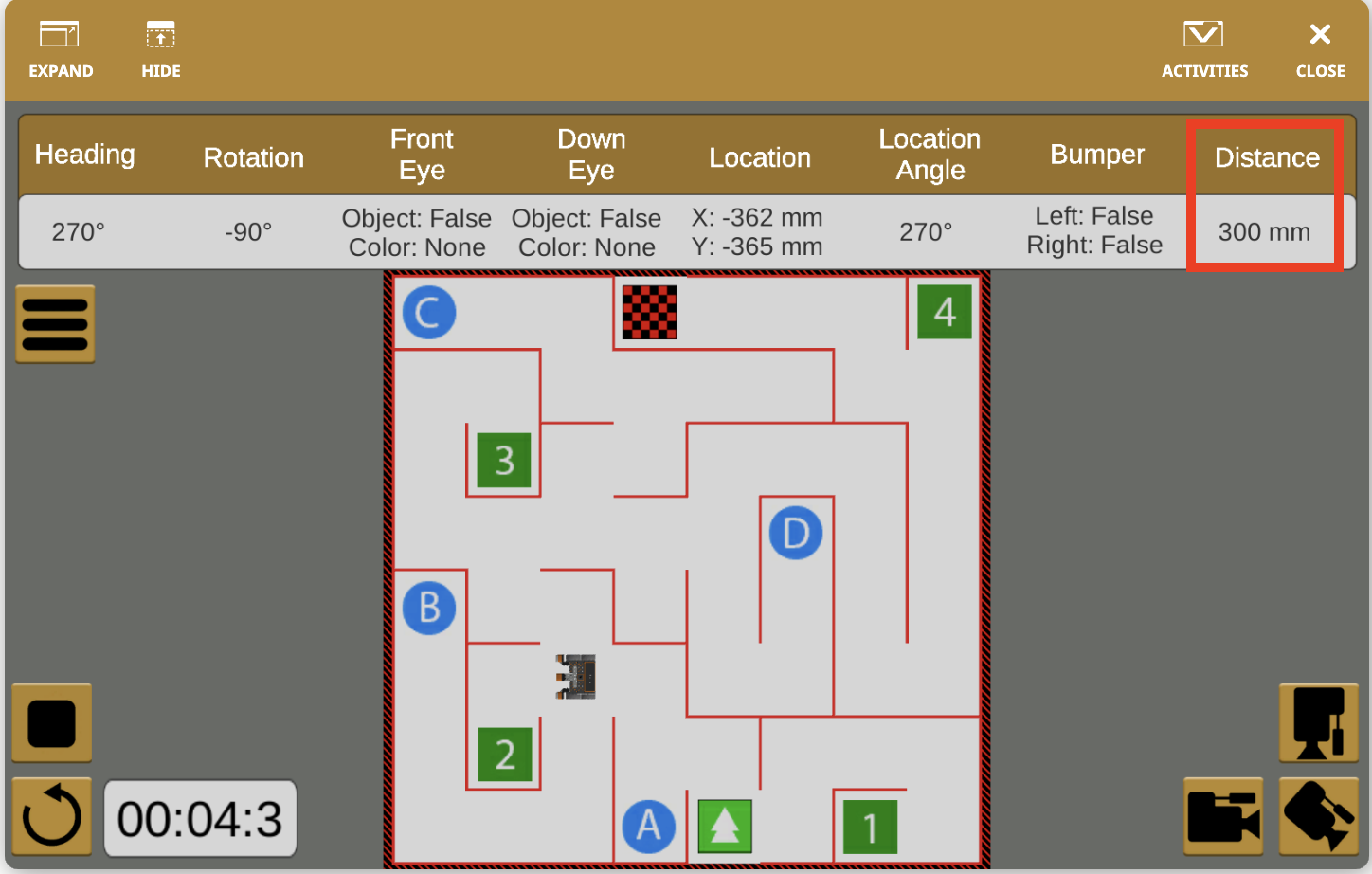
Bạn có thể sử dụng dữ liệu Cảm biến khoảng cách được báo cáo trong Bảng điều khiển để ước tính khoảng cách từ Robot VR đến một vật thể. Dừng dự án khi Robot VR đến được vị trí mong muốn. Khi dừng lại, các giá trị trong Bảng điều khiển sẽ hiển thị các giá trị cảm biến cho Robot VR tại vị trí hiện tại của nó. Có thể sử dụng tính năng này để quan sát các giá trị cảm biến cũng như hình dung khoảng cách giữa Robot VR và một vật thể tại một thời điểm nhất định.
Dừng dự án khi VR Robot đạt đến một điểm cụ thể cho phép bạn tạm dừng dự án để xem giá trị mà Cảm biến khoảng cách đang báo cáo theo thời gian thực. Trong trường hợp Mê cung tường, giá trị này có thể được sử dụng trong toán tử lớn hơn (>) để khiến Robot VR dừng lại ở khoảng cách xa hơn so với tường.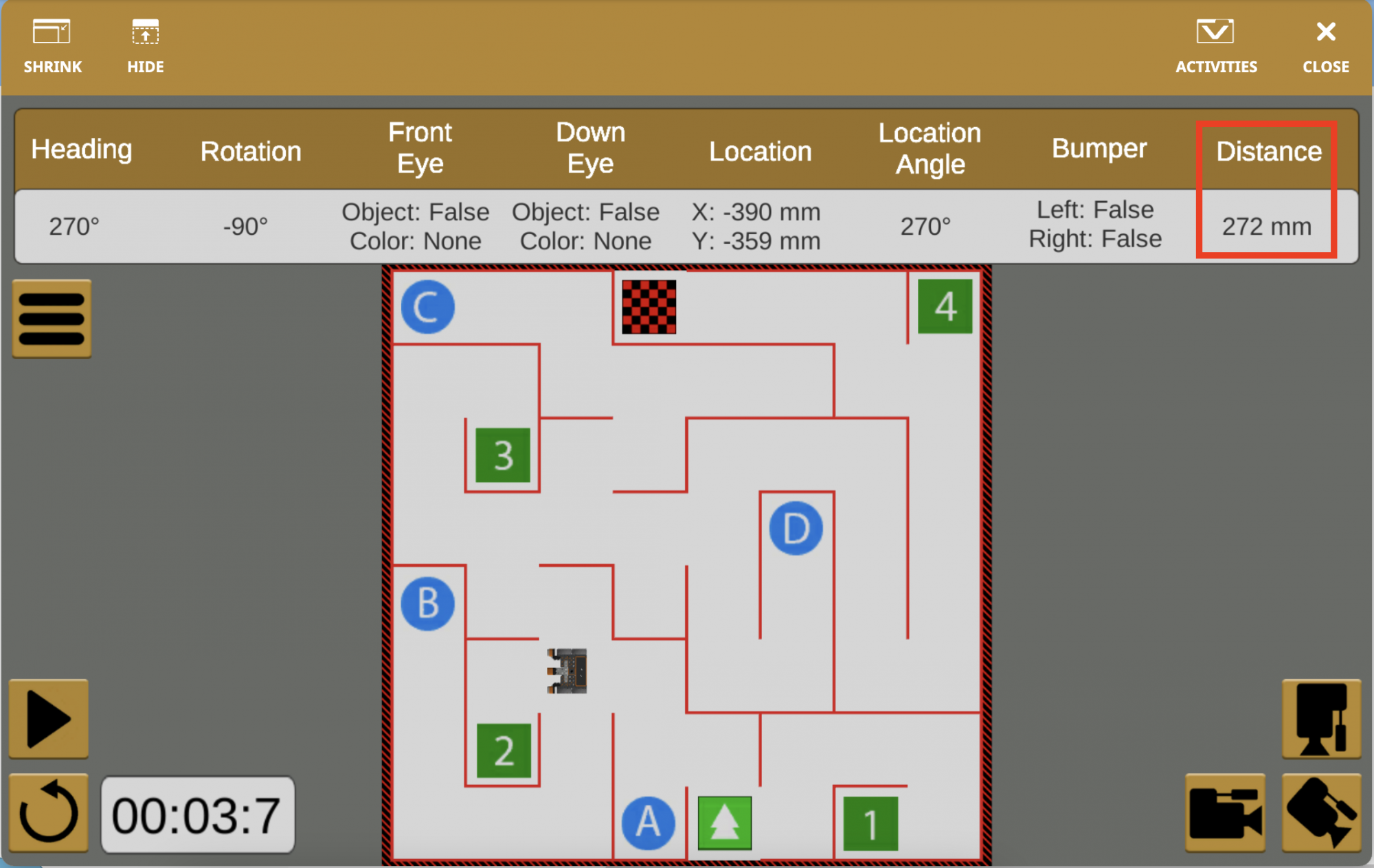
-
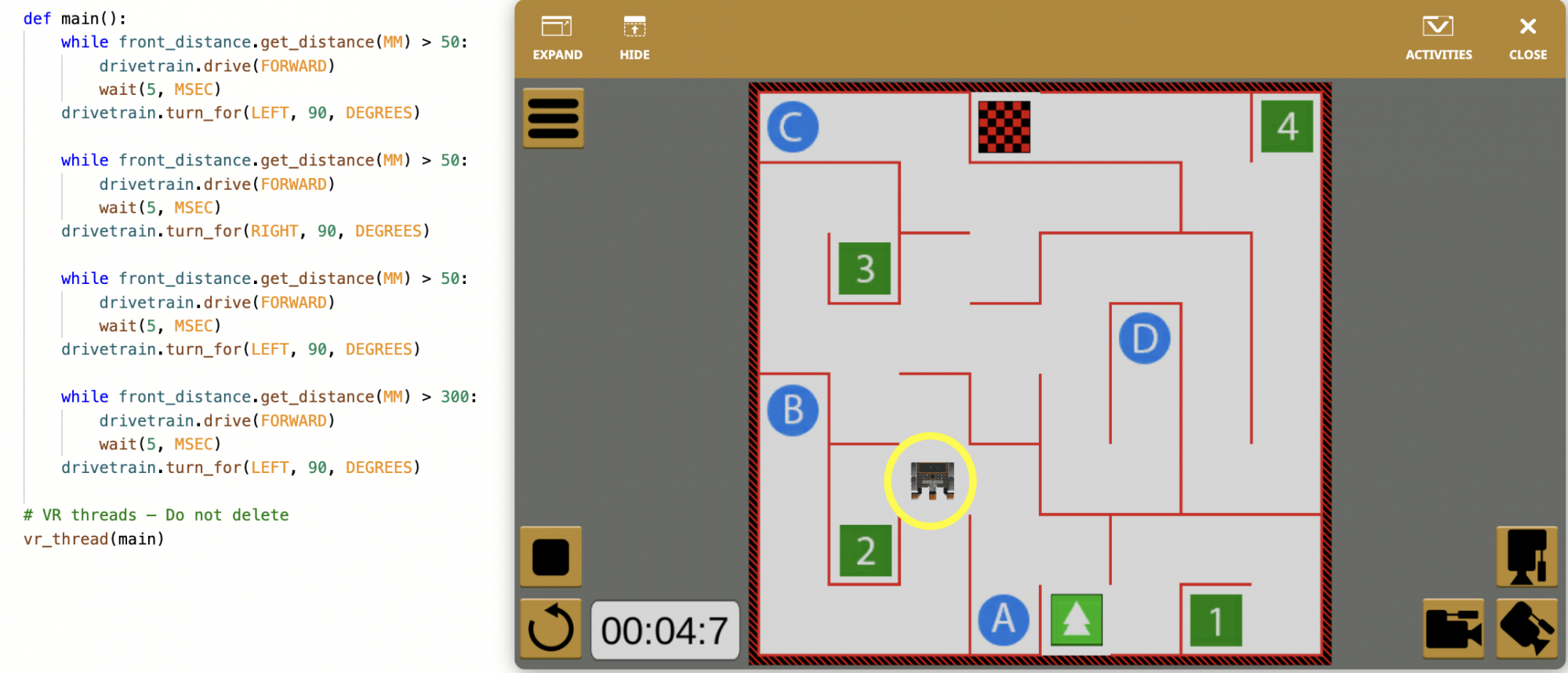
Điều chỉnh giá trị trong toán tử so sánh vòng lặp while cuối cùng thành 300 milimét (mm), như minh họa bên dưới. Điều này sẽ cho phép VR Robot di chuyển về phía trước khi khoảng cách đến tường lớn hơn 300 mm. Khi khoảng cách nhỏ hơn 300 mm, VR Robot sẽ rẽ trái tại vị trí rẽ mong muốn trong Mê cung tường.
trong khi front_distance.get_distance(MM) > 300: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - Khởi chạy Sân chơi mê cung tườngnếu nó chưa mở và chạy dự án. Lưu ý cách VR Robot rẽ trái tại vị trí rẽ mong muốn để sẵn sàng tiếp tục đi qua mê cung đến chữ 'B'.
- Tiếp theo, thêm các lệnh sau vào dự án của bạn, sau lệnh cuối cùng turn_for để VR Robot tiếp tục di chuyển đến chữ 'B'. Hãy chắc chắn rằng các vòng lặp while được thụt vào đúng cách.
-
trong khi front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(RIGHT, 90, DEGREES) trong khi front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(RIGHT, 90, DEGREES) trong khi front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() -
Khởi chạy Sân chơi mê cung tường nếu nó chưa mở và chạy lại dự án.

- Robot VR hiện có thể di chuyển từ điểm bắt đầu của Sân chơi mê cung tường và dừng lại ở chữ 'B'.
- Lưu ý rằng việc thay đổi toán hạng bên phải thành 300 mm cho phép Robot VR quay xa hơn khỏi bức tường, điều này là cần thiết để quay ở đúng vị trí.
- Giá trị khoảng cách được báo cáo trong Bảng điều khiển có thể được sử dụng để quan sát khoảng cách của Robot VR với bức tường khi cần phải rẽ để đến chữ 'B'.
Chọn nút Tiếp theo để tiếp tục phần còn lại của Bài học này.