
Pelajaran 3: Berbelok pada Jarak Lebih Jauh
Menavigasi ke Lokasi Belok
-
Tambahkan perintah berikut ke proyek Anda, setelah perintah turn_for terakhir. Pastikan indentasi loop sementara sesuai dengan yang ada di proyek. Anda dapat menyalin dan menempel ke atau dari proyek yang ada, atau mengetiknya ke dalam Ruang Kerja.
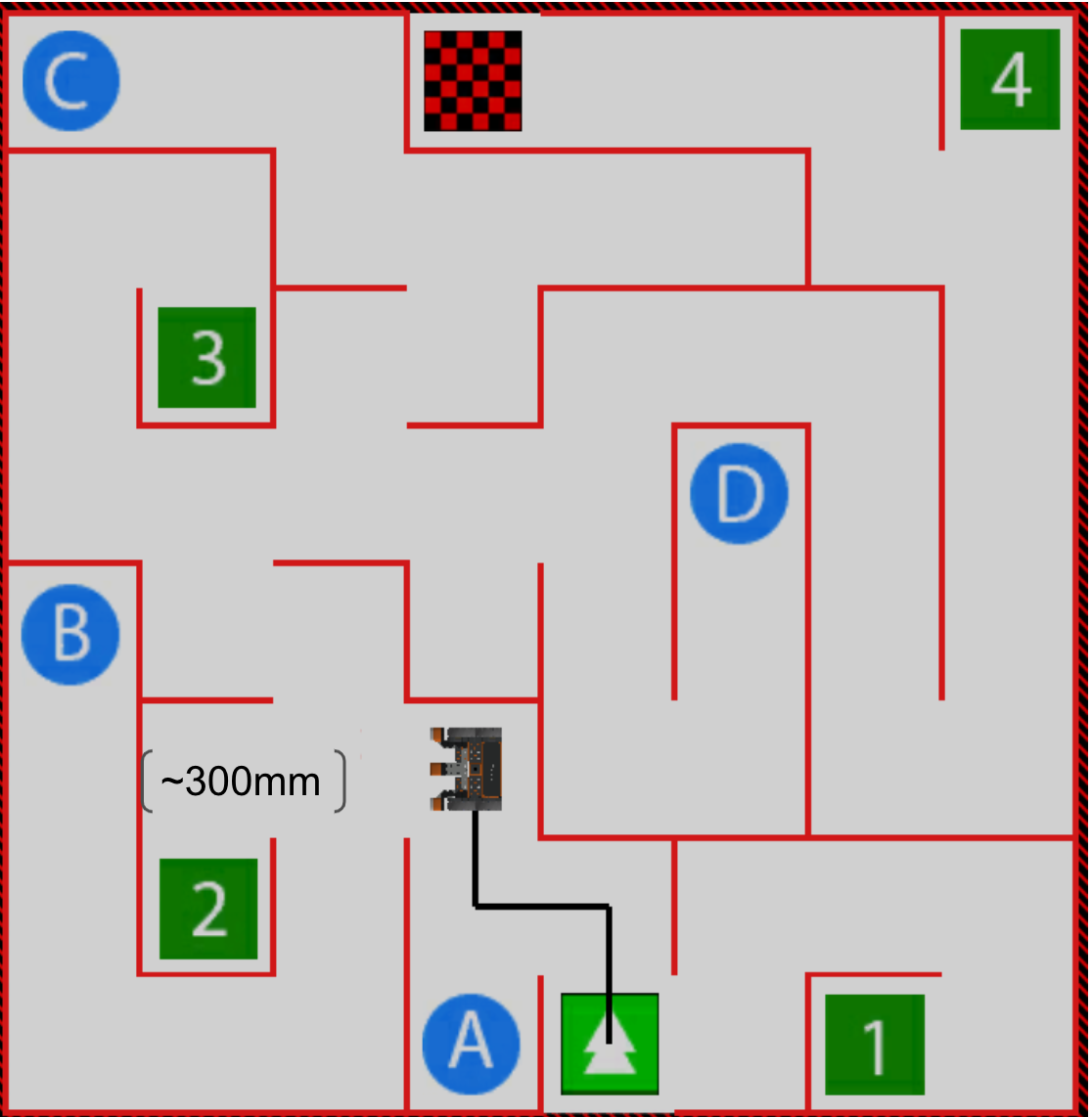
sementara jarak_depan.dapatkan_jarak(MM) > 50: drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.belok_untuk(KIRI, 90, DERAJAT) - Kita dapat memperkirakan bahwa jarak dari dinding berikutnya ke lokasi belokan yang kita inginkan di labirin, adalah sekitar 300 milimeter (mm).
Untuk Informasi Anda
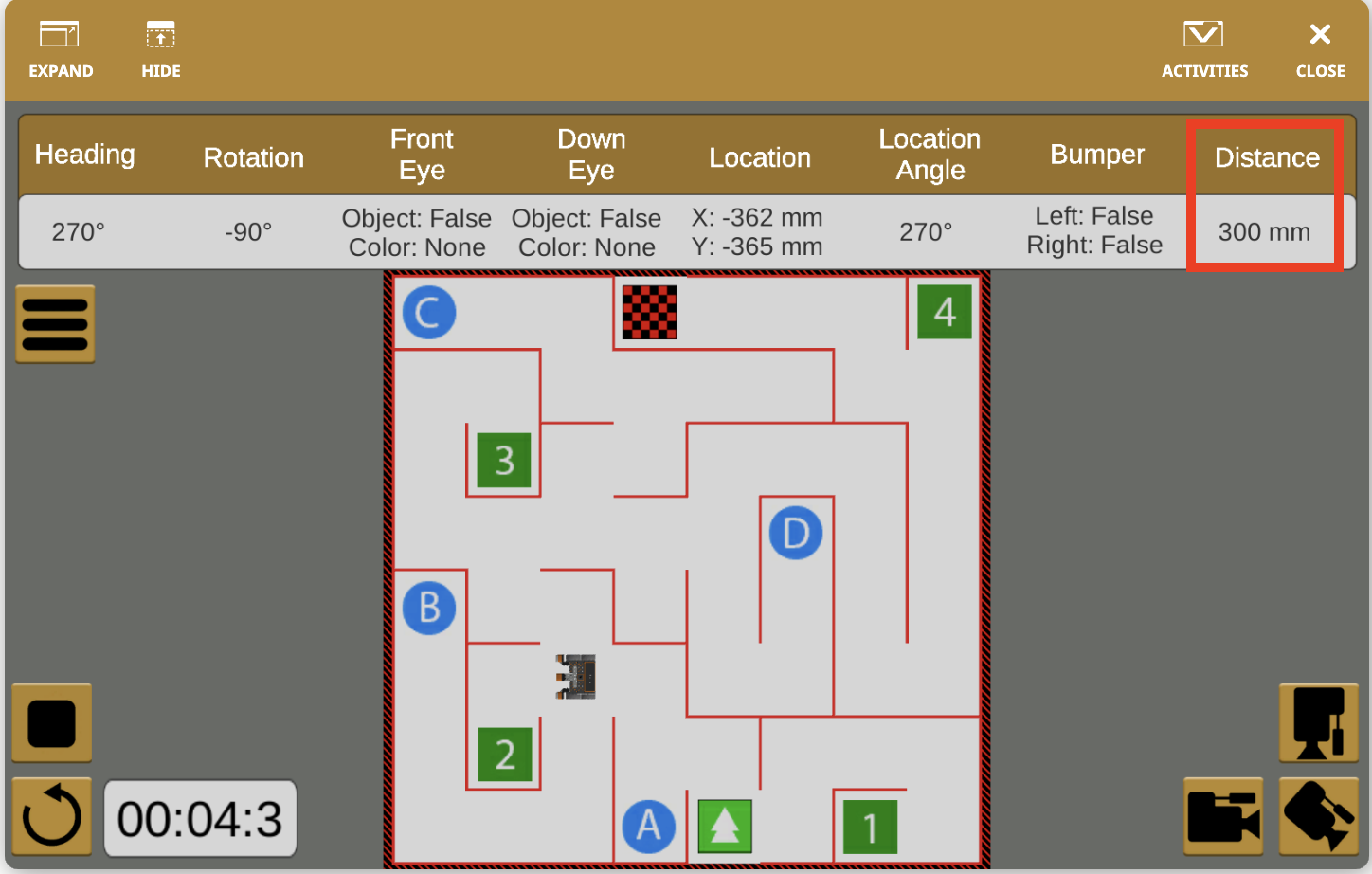
Anda dapat menggunakan data Sensor Jarak seperti yang dilaporkan di Dasbor untuk memperkirakan jarak Robot VR dari suatu objek. Hentikan proyek Anda saat Robot VR mencapai lokasi yang Anda inginkan. Setelah berhenti, nilai pada Dashboard akan menampilkan nilai sensor untuk Robot VR di mana ia saat ini diposisikan. Ini dapat digunakan untuk mengamati nilai sensor serta memvisualisasikan jarak antara Robot VR dan suatu objek pada titik waktu tertentu.
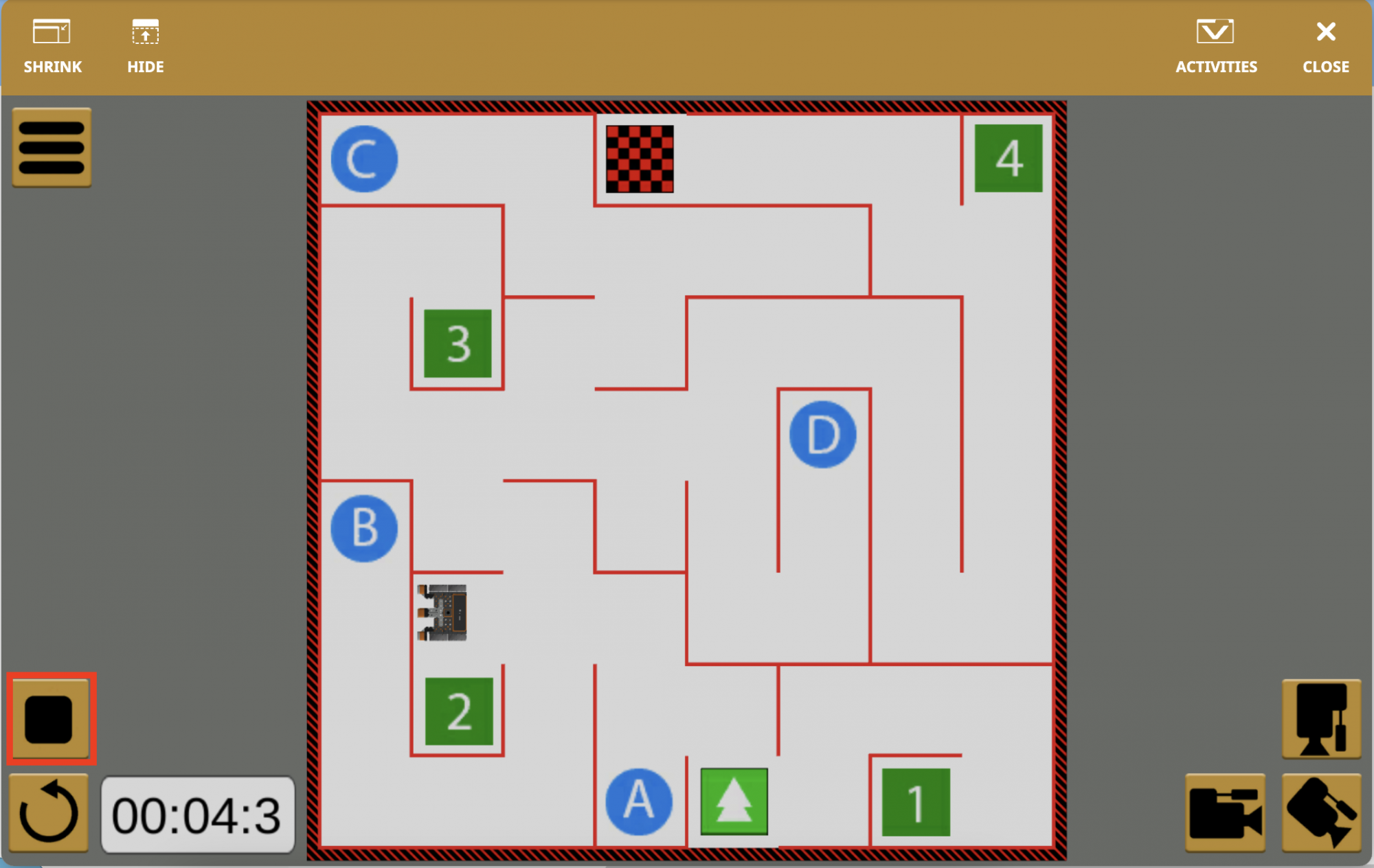
Menghentikan proyek saat Robot VR mencapai titik tertentu, memungkinkan Anda menjeda proyek untuk melihat nilai apa yang dilaporkan Sensor Jarak secara real time. Dalam kasus Wall Maze, nilai ini dapat digunakan dalam operator lebih besar dari (>) untuk membuat Robot VR berhenti pada jarak lebih jauh dari dinding.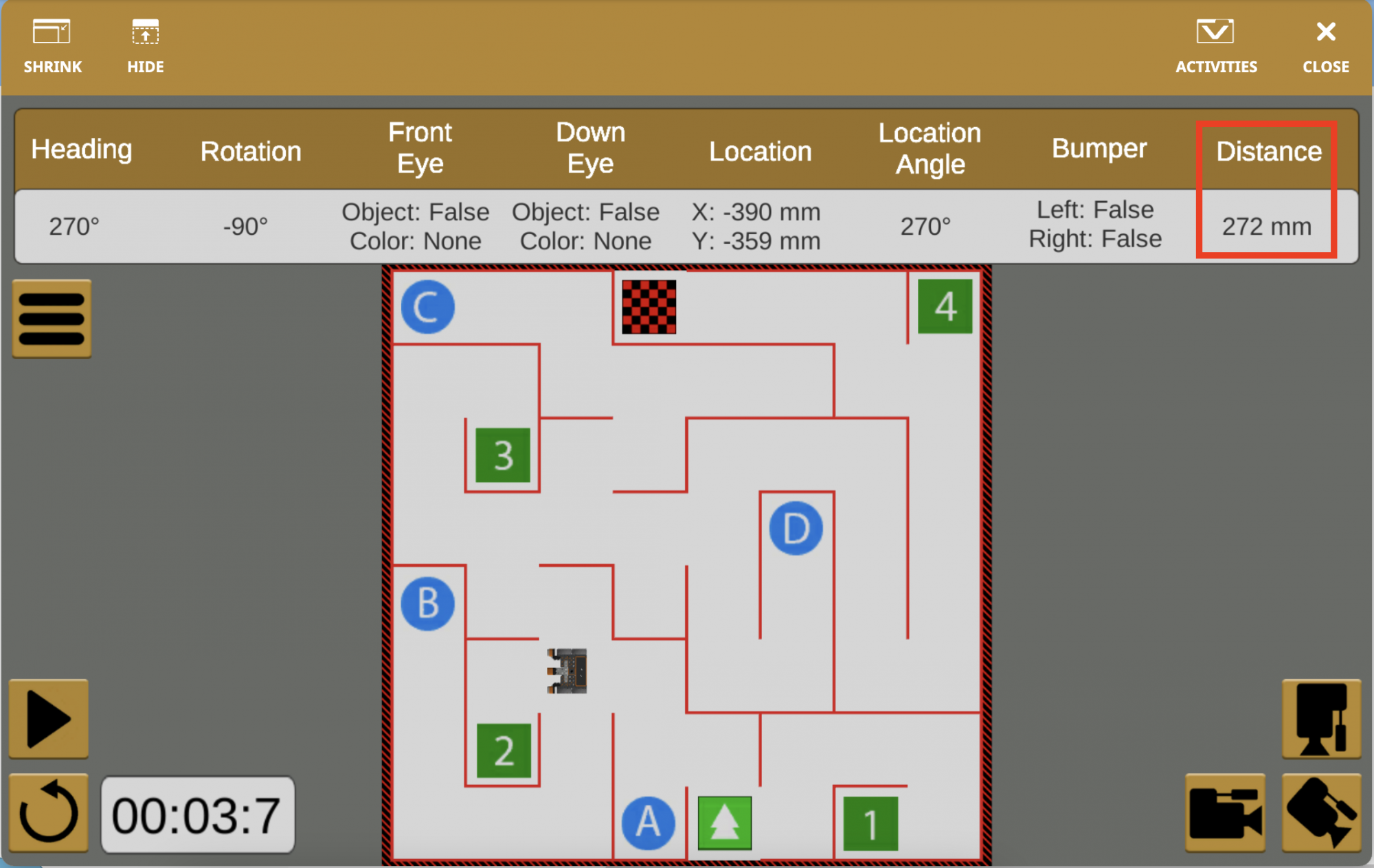
-
Sesuaikan nilai pada operator perbandingan loop sementara terakhir menjadi 300 milimeter (mm), seperti yang ditunjukkan di bawah ini. Ini akan memungkinkan Robot VR untuk melaju maju sementara jarak ke dinding lebih dari 300 milimeter. Bila kurang dari 300 milimeter, Robot VR akan berbelok ke kiri, di lokasi belokan yang diinginkan di Wall Maze.
sementara jarak_depan.dapatkan_jarak(MM) > 300: drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.belok_untuk(KIRI, 90, DERAJAT) - LuncurkanWall Maze Playgroundjika belum terbuka dan jalankan proyeknya. Perhatikan bagaimana Robot VR berbelok ke kiri di lokasi belokan yang diinginkan, sehingga siap untuk melanjutkan perjalanan melalui labirin menuju huruf 'B'.
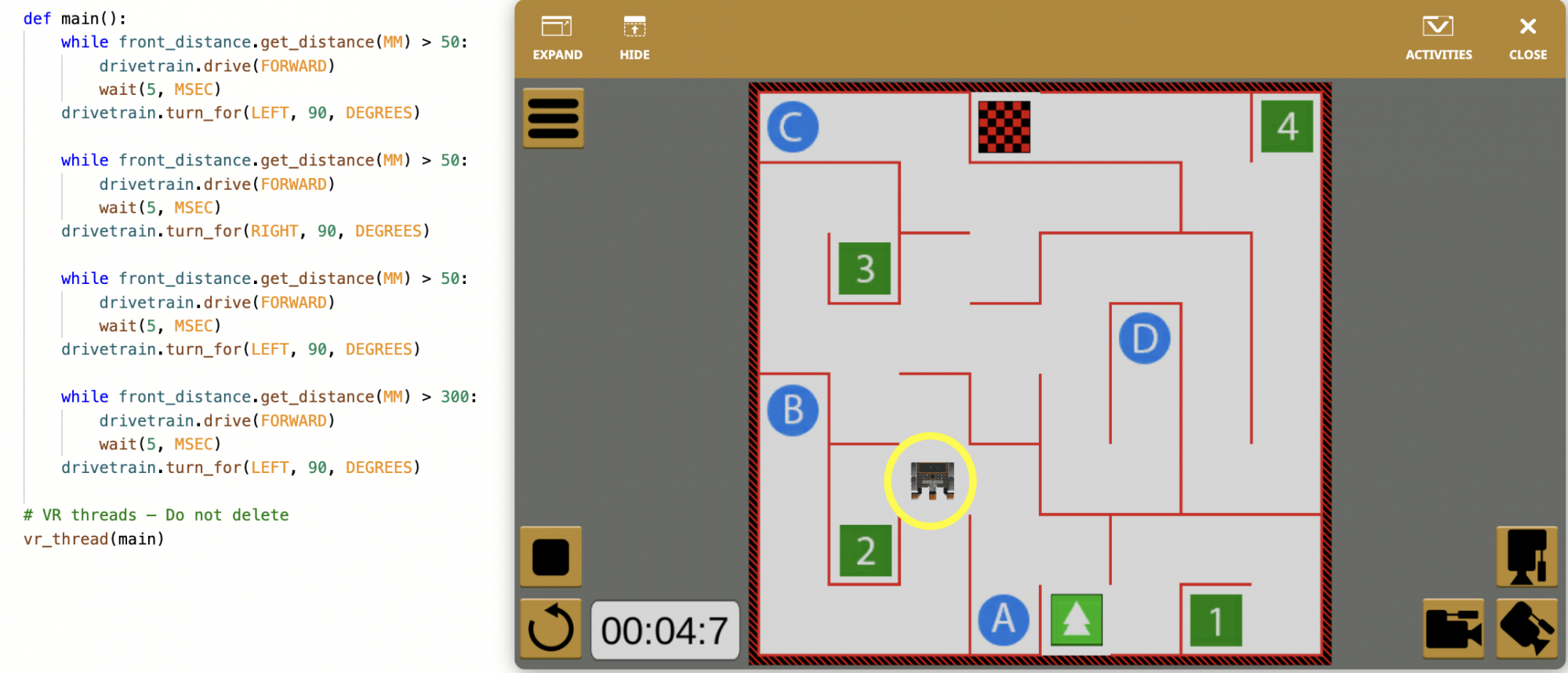
- Berikutnya, tambahkan perintah berikut ke proyek Anda, setelah perintah terakhir turn_for , sehingga Robot VR melanjutkan jalurnya ke huruf 'B'. Pastikan bahwa loop sementara diberi indentasi dengan benar.
-
sementara jarak_depan.dapatkan_jarak(MM) > 50: drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.berbelok_ke(KANAN, 90, DERAJAT) sementara jarak_depan.dapatkan_jarak(MM) > 50: drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.berbelok_ke(KANAN, 90, DERAJAT) sementara jarak_depan.dapatkan_jarak(MM) > 50: drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.berhenti() -
Luncurkan Wall Maze Playground jika belum terbuka dan jalankan proyek lagi.

- Robot VR sekarang melaju dari awal Wall Maze Playground dan berhenti di huruf 'B.'
- Perhatikan bahwa mengubah operan kanan menjadi 300 milimeter memungkinkan Robot VR berputar pada jarak yang lebih jauh dari dinding, yang diperlukan untuk berputar di lokasi yang benar.
- Nilai jarak yang dilaporkan di Dasbor dapat digunakan untuk mengamati seberapa jauh Robot VR dari dinding saat perlu berbelok untuk mencapai huruf 'B'.
Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.