
पाठ 3: अधिक दूरी पर मुड़ना
मोड़ स्थान पर नेविगेट करना
-
अपने प्रोजेक्ट में अंतिम turn_for कमांड के बाद निम्नलिखित कमांड जोड़ें। सुनिश्चित करें कि while लूप्स का इंडेंटेशन प्रोजेक्ट में दिए गए इंडेंटेशन से मेल खाता हो। आप इन्हें अपने मौजूदा प्रोजेक्ट में कॉपी और पेस्ट कर सकते हैं, या वर्कस्पेस में टाइप कर सकते हैं।
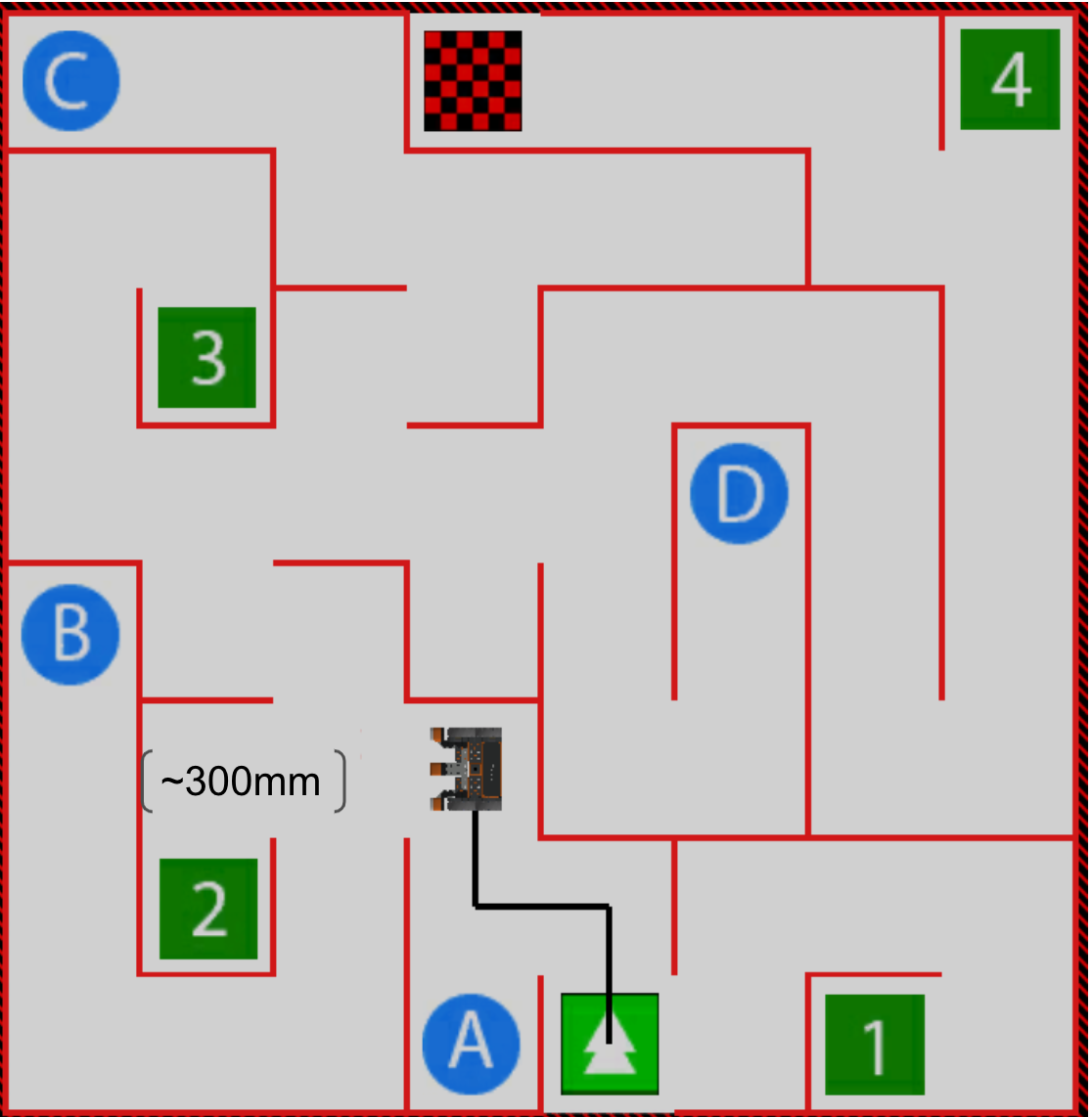
जबकि front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - हम अनुमान लगा सकते हैं कि भूलभुलैया में अगली दीवार से हमारे इच्छित मोड़ स्थान तक की दूरी लगभग 300 मिलीमीटर (मिमी) है।
आपकी जानकारी के लिए
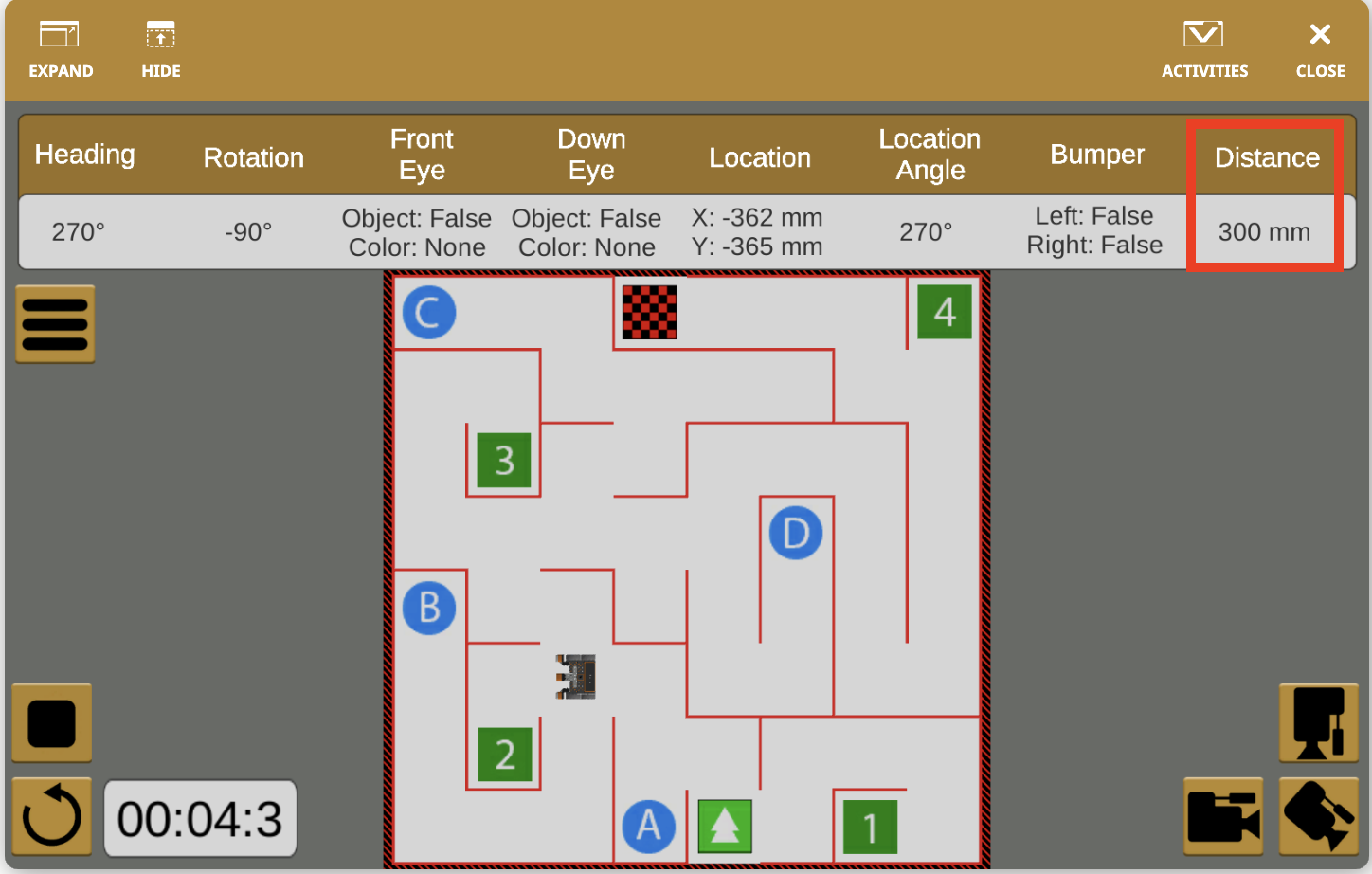
आप डैशबोर्ड में रिपोर्ट किए गए दूरी सेंसर डेटा का उपयोग करके यह अनुमान लगा सकते हैं कि VR रोबोट किसी वस्तु से कितनी दूरी पर है। जब VR रोबोट आपके इच्छित स्थान पर पहुंच जाए तो अपना प्रोजेक्ट रोक दें। एक बार रुकने के बाद, डैशबोर्ड में मान VR रोबोट के लिए सेंसर मान प्रदर्शित करेंगे जहां वह वर्तमान में स्थित है। इसका उपयोग सेंसर मानों का निरीक्षण करने के साथ-साथ किसी निश्चित समय पर वीआर रोबोट और किसी वस्तु के बीच की दूरी को देखने के लिए भी किया जा सकता है।
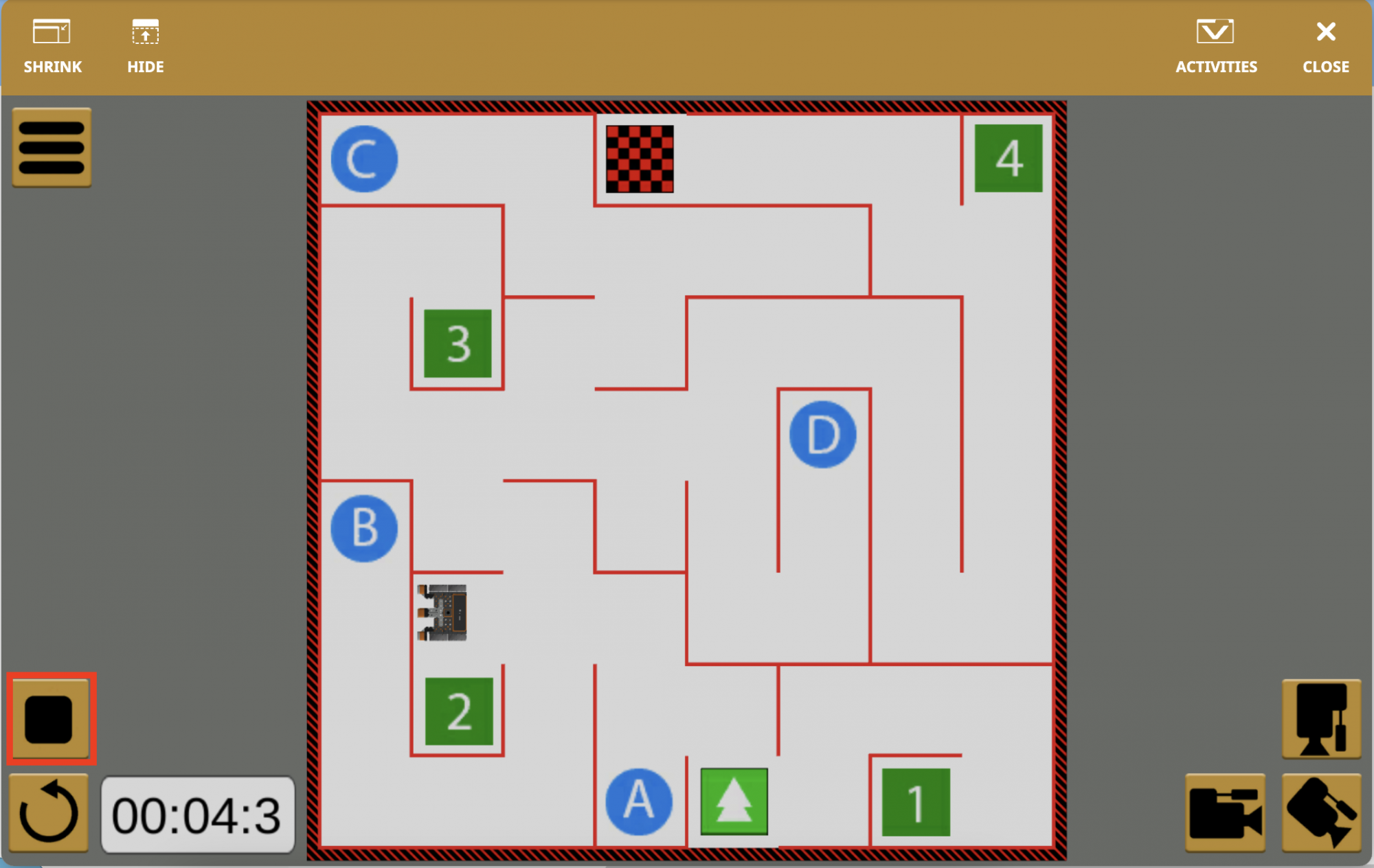
जब वीआर रोबोट किसी विशिष्ट बिंदु पर पहुंचता है तो प्रोजेक्ट को रोक देने से आप प्रोजेक्ट को रोककर देख सकते हैं कि डिस्टेंस सेंसर वास्तविक समय में क्या मान रिपोर्ट कर रहा है। दीवार भूलभुलैया के मामले में, इस मान का उपयोग (>) ऑपरेटर से अधिक में किया जा सकता है ताकि वीआर रोबोट दीवार से अधिक दूरी पर रुक सके।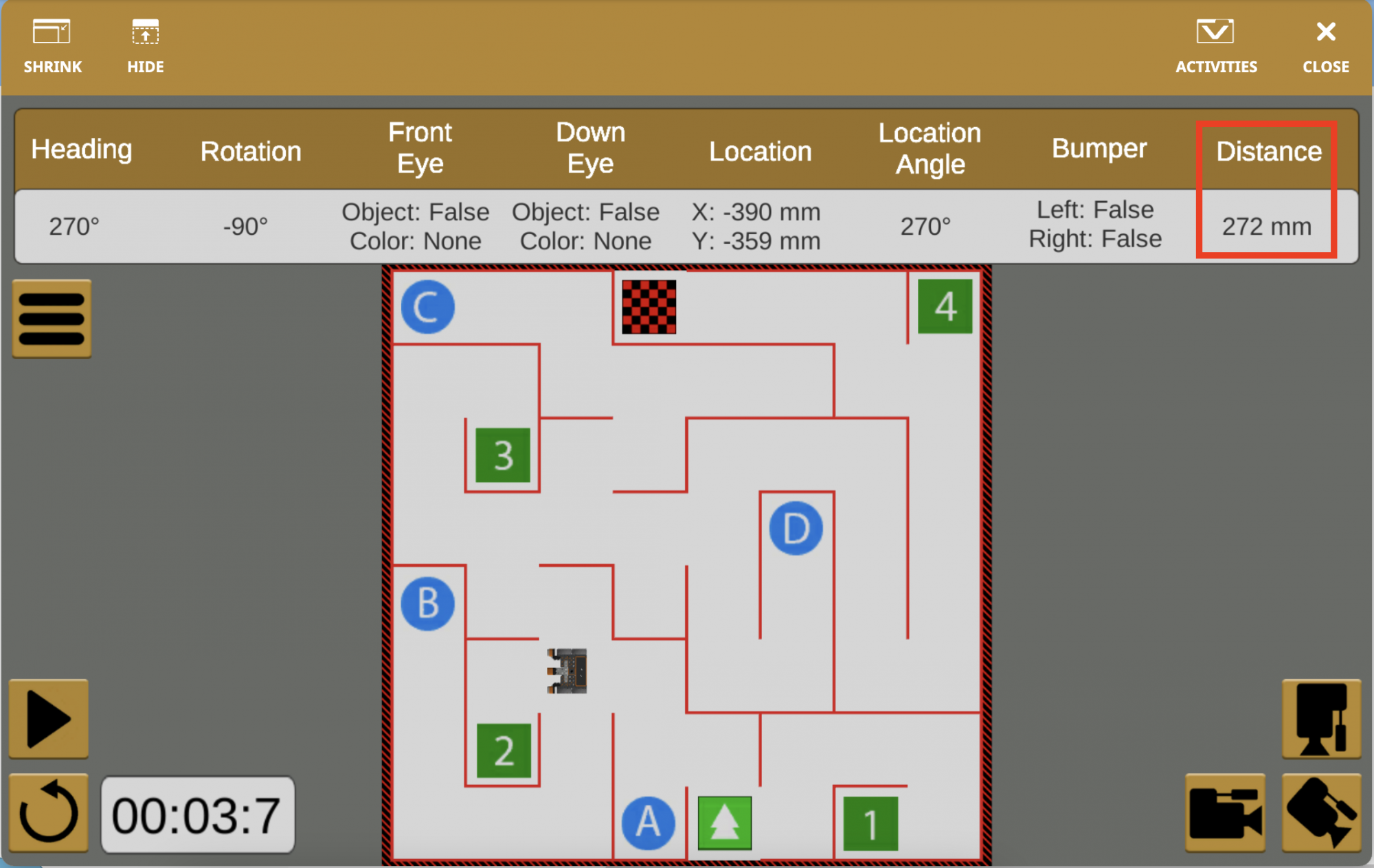
-
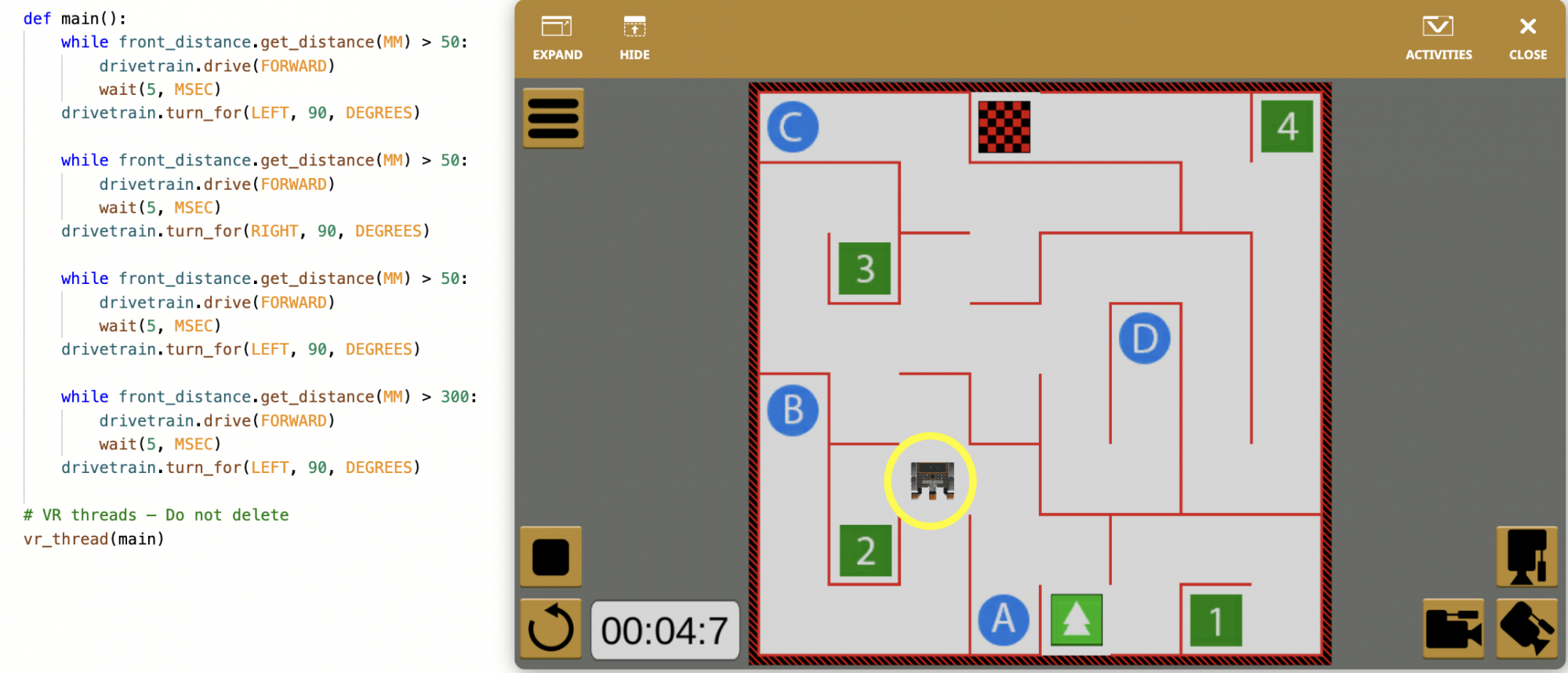
अंतिम while लूप तुलना ऑपरेटर में मान को 300 मिलीमीटर (मिमी) तक समायोजित करें, जैसा कि नीचे दिखाया गया है। इससे वीआर रोबोट दीवार से 300 मिलीमीटर से अधिक दूरी पर भी आगे बढ़ सकेगा। जब यह 300 मिलीमीटर से कम होगा, तो वीआर रोबोट दीवार भूलभुलैया में वांछित मोड़ स्थान पर बाईं ओर मुड़ जाएगा।
जबकि front_distance.get_distance(MM) > 300: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - यदिवॉल मेज़ प्लेग्राउंडपहले से खुला नहीं है तो उसे लॉन्च करें और प्रोजेक्ट चलाएं। ध्यान दें कि कैसे वीआर रोबोट वांछित मोड़ वाले स्थान पर बायीं ओर मुड़ता है, ताकि वह भूलभुलैया से होते हुए अक्षर 'बी' तक जाने के लिए तैयार हो जाए।
- इसके बाद, अंतिम turn_for कमांड के बाद, अपने प्रोजेक्ट में निम्नलिखित कमांड जोड़ें, ताकि VR रोबोट अक्षर 'B' की ओर अपने पथ पर आगे बढ़ता रहे। सुनिश्चित करें कि while लूप सही ढंग से इंडेंट किए गए हैं।
-
जबकि front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(RIGHT, 90, DEGREES) जबकि front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(RIGHT, 90, DEGREES) जबकि front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() -
यदि वॉल मेज़ प्लेग्राउंड पहले से खुला नहीं है तो उसे लॉन्च करें और प्रोजेक्ट को पुनः चलाएं।

- वीआर रोबोट अब वॉल मेज़ प्लेग्राउंड के प्रारंभ से चलता है और अक्षर 'बी' पर रुकता है।
- ध्यान दें कि दाएं ऑपरेंड को 300 मिलीमीटर में बदलने से वीआर रोबोट को दीवार से अधिक दूरी पर मुड़ने की अनुमति मिली, जो सही स्थान पर मुड़ने के लिए आवश्यक था।
- डैशबोर्ड में बताए गए दूरी मान का उपयोग यह देखने के लिए किया जा सकता है कि जब वीआर रोबोट को अक्षर 'बी' तक पहुंचने के लिए मुड़ना पड़ा तो वह दीवार से कितनी दूरी पर था।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।