
Lezione 3: Tornitura a distanza
Navigazione verso il luogo di tornitura
-
Aggiungi i seguenti comandi al tuo progetto, dopo l'ultimo comando turn_for . Assicurarsi che l'indentazione dei loop while corrisponda a quella del progetto. Puoi copiare e incollare nel o dal tuo progetto esistente o digitarli nello spazio di lavoro.
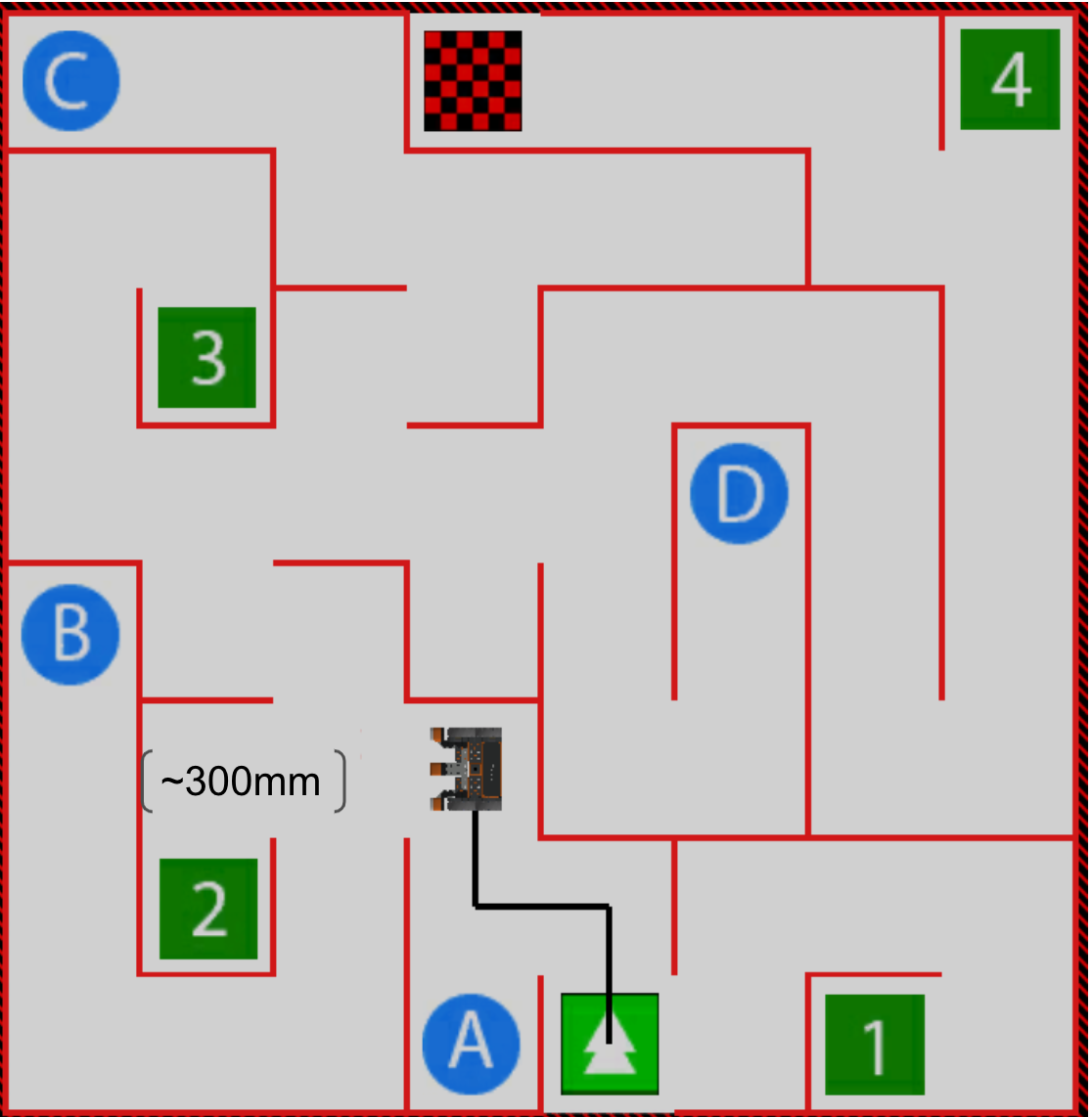
mentre front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - Possiamo stimare che la distanza dalla parete successiva alla posizione di tornitura desiderata nel labirinto sia di circa 300 millimetri (mm).
Per tua informazione
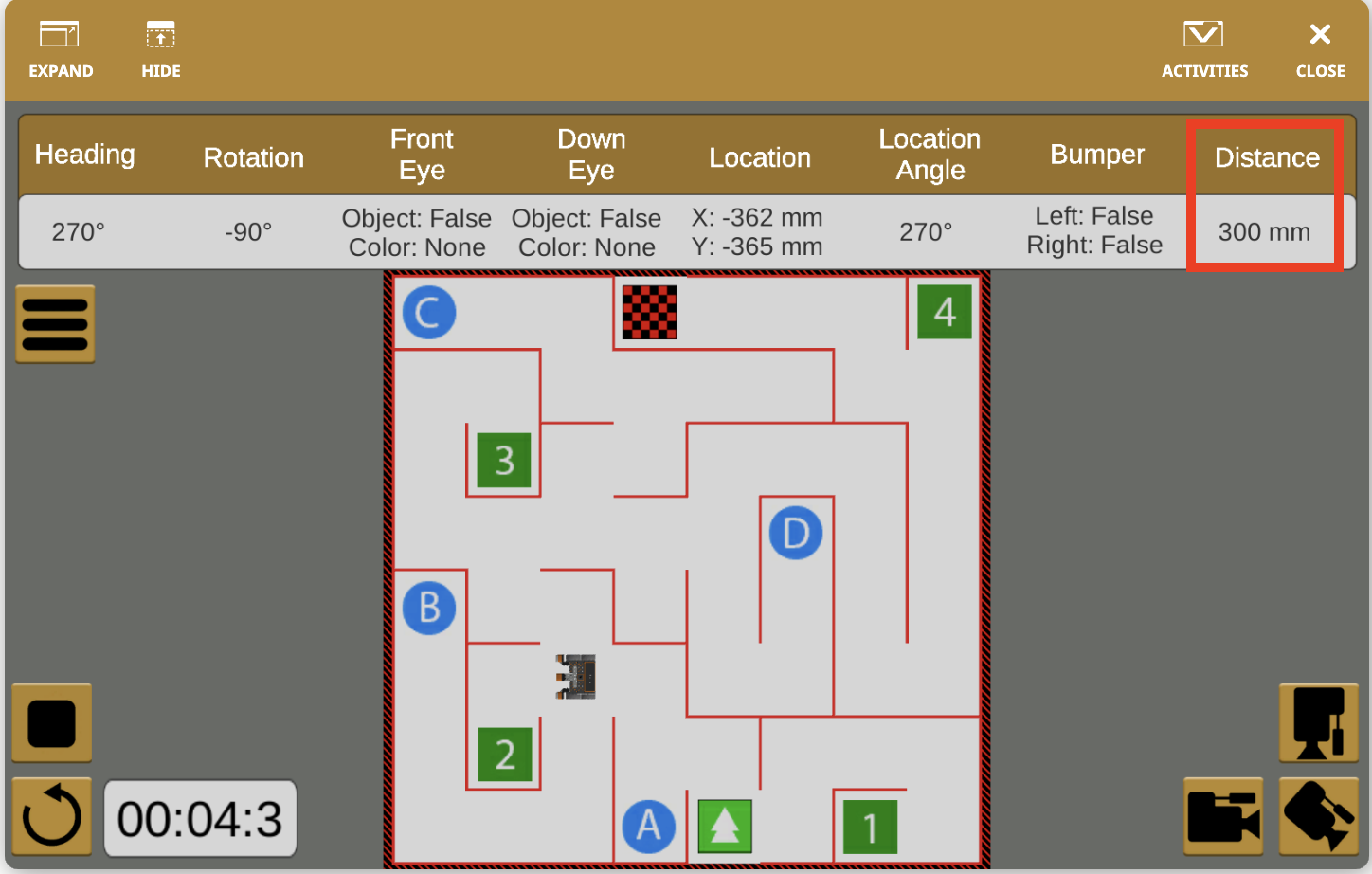
È possibile utilizzare i dati del sensore di distanza come riportato nel cruscotto per stimare la distanza del robot VR da un oggetto. Interrompi il tuo progetto quando il robot VR raggiunge la posizione desiderata. Una volta fermati, i valori nella Dashboard visualizzeranno i valori del sensore per il Robot VR in cui è attualmente posizionato. Questo può essere utilizzato per osservare i valori dei sensori e visualizzare la distanza tra il robot VR e un oggetto in un determinato momento.
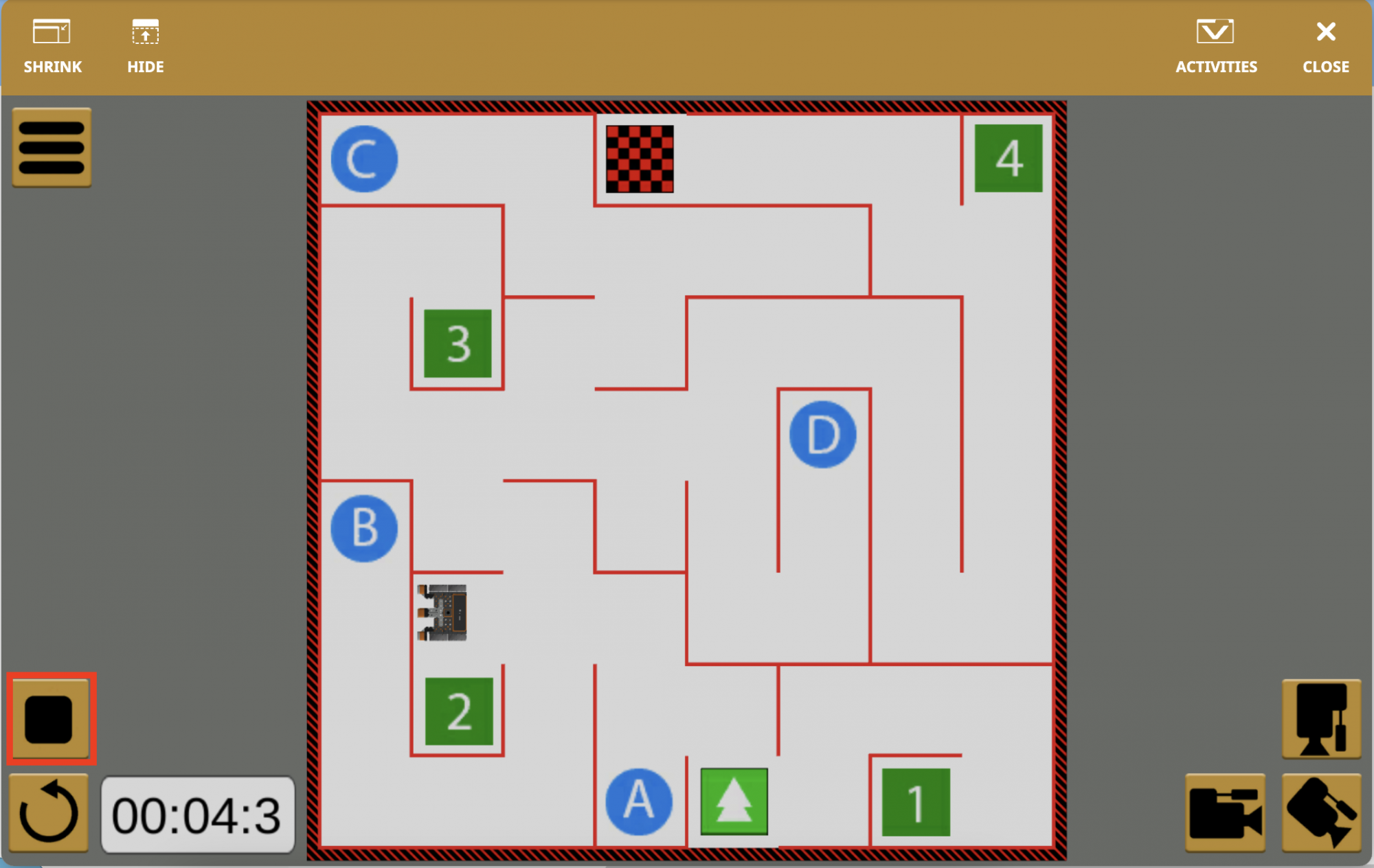
Interrompere il progetto quando il robot VR raggiunge un punto specifico, consente di mettere in pausa il progetto per vedere quale valore il sensore di distanza sta segnalando in tempo reale. Nel caso del Wall Maze, questo valore può essere utilizzato nell'operatore maggiore di (>) per fare in modo che il Robot VR si fermi ad un'ulteriore distanza dalla parete.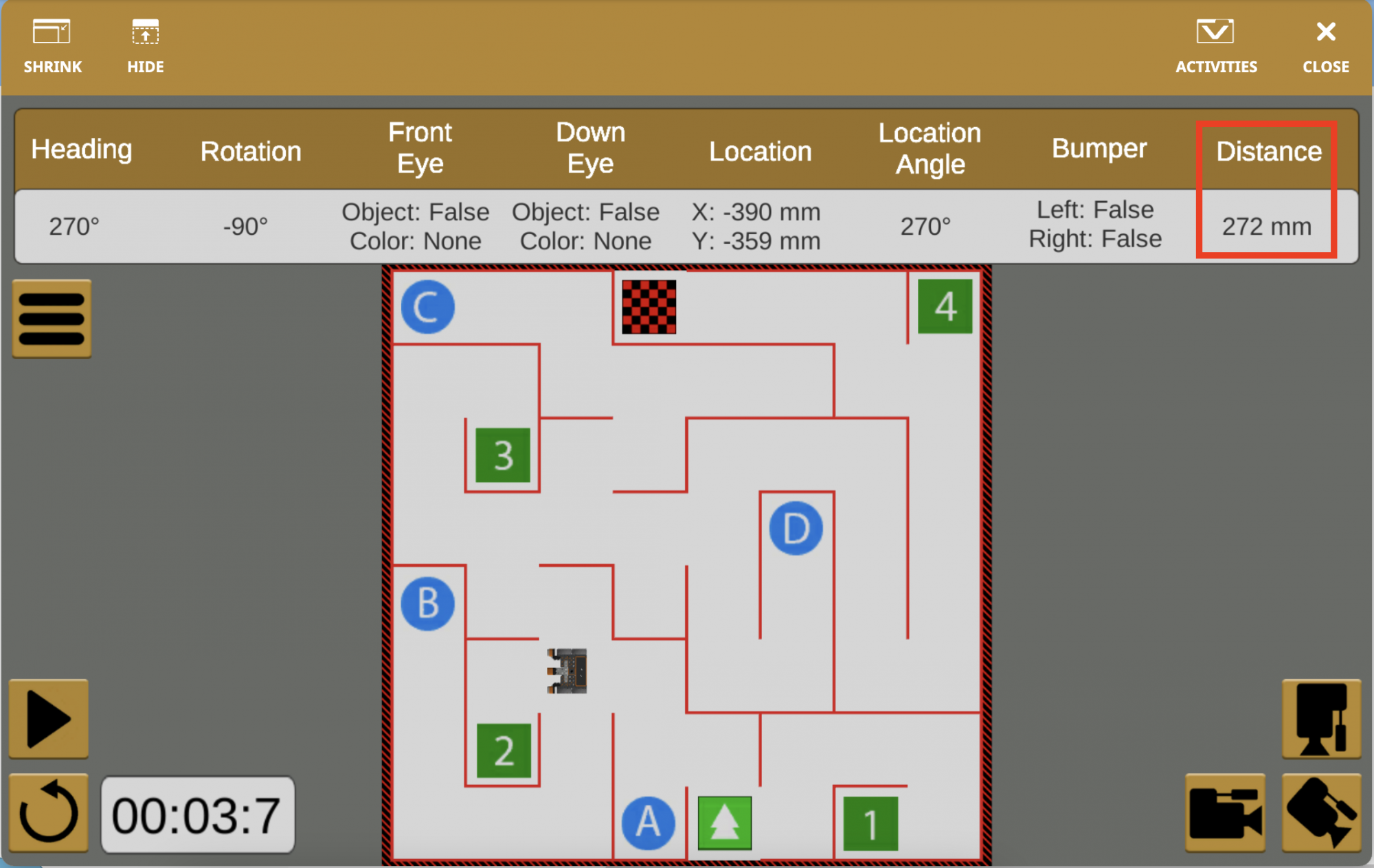
-
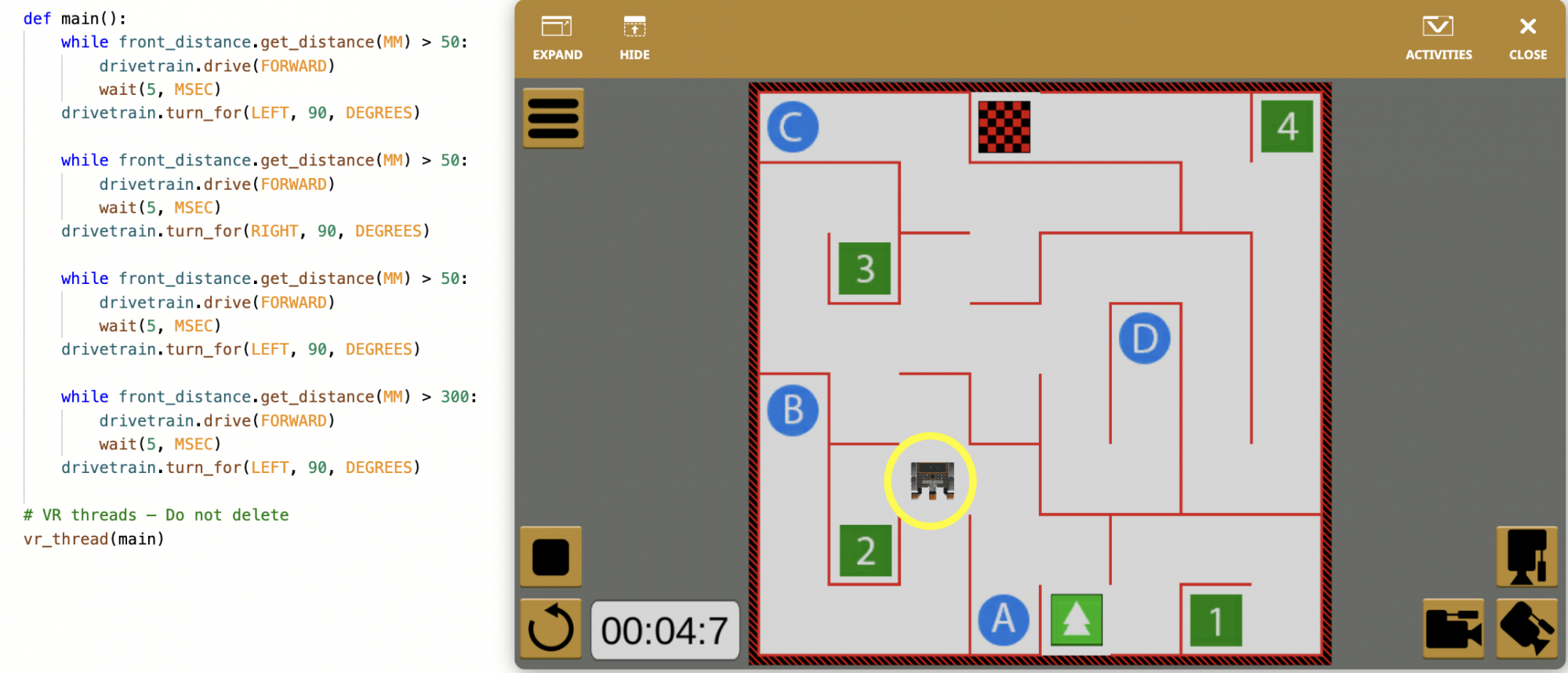
Regolare il valore nell'operatore di confronto finale while loop a 300 millimetri (mm), come mostrato di seguito. Ciò consentirà al robot VR di avanzare mentre la distanza dalla parete è superiore a 300 millimetri. Quando è inferiore a 300 millimetri, il robot VR gira a sinistra, nella posizione di svolta desiderata nel labirinto a parete.
mentre front_distance.get_distance(MM) > 300: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - Avviare il Wall Maze Playground se non è già aperto ed eseguire il progetto. Notare come il robot VR gira a sinistra nella posizione di svolta desiderata, in modo che sia pronto a continuare attraverso il labirinto fino alla lettera "B".
- Successivamente, aggiungi i seguenti comandi al tuo progetto, dopo il comando finale turn_for , in modo che il robot VR continui il suo percorso verso la lettera 'B'. Assicurarsi che i loop e siano rientrati correttamente.
-
while front_distance.get_distance(MM) > 50: drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.turn_for (RIGHT, 90, DEGREES) while front_distance.get_distance (MM) > 50: drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.turn_for (RIGHT, 90, DEGREES) while front_distance.get_distance (MM) > 50: drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.stop() -
Avviare il Wall Maze Playground se non è già aperto ed eseguire nuovamente il progetto.

- Il robot VR ora guida dall'inizio del Wall Maze Playground e si ferma sulla lettera "B".
- Si noti che cambiare l'operando destro a 300 millimetri ha permesso al robot VR di girare a una distanza maggiore dalla parete, il che era necessario per girare nella posizione corretta.
- Il valore della distanza riportato nel cruscotto può essere utilizzato per osservare la distanza del robot VR da un muro quando doveva girare per raggiungere la lettera "B".
Selezionare il pulsante Avanti per continuare con il resto della lezione.