
পাঠ ৩: আরও দূরত্বে ঘুরতে থাকা
বাঁকের স্থানে নেভিগেট করা
-
শেষ turn_for কমান্ডের পরে, আপনার প্রকল্পে নিম্নলিখিত কমান্ডগুলি যোগ করুন। নিশ্চিত করুন যে while লুপের ইন্ডেন্টেশনটি প্রকল্পের সাথে মেলে। আপনি আপনার বিদ্যমান প্রকল্পে অথবা প্রকল্প থেকে কপি এবং পেস্ট করতে পারেন, অথবা ওয়ার্কস্পেসে টাইপ করতে পারেন।
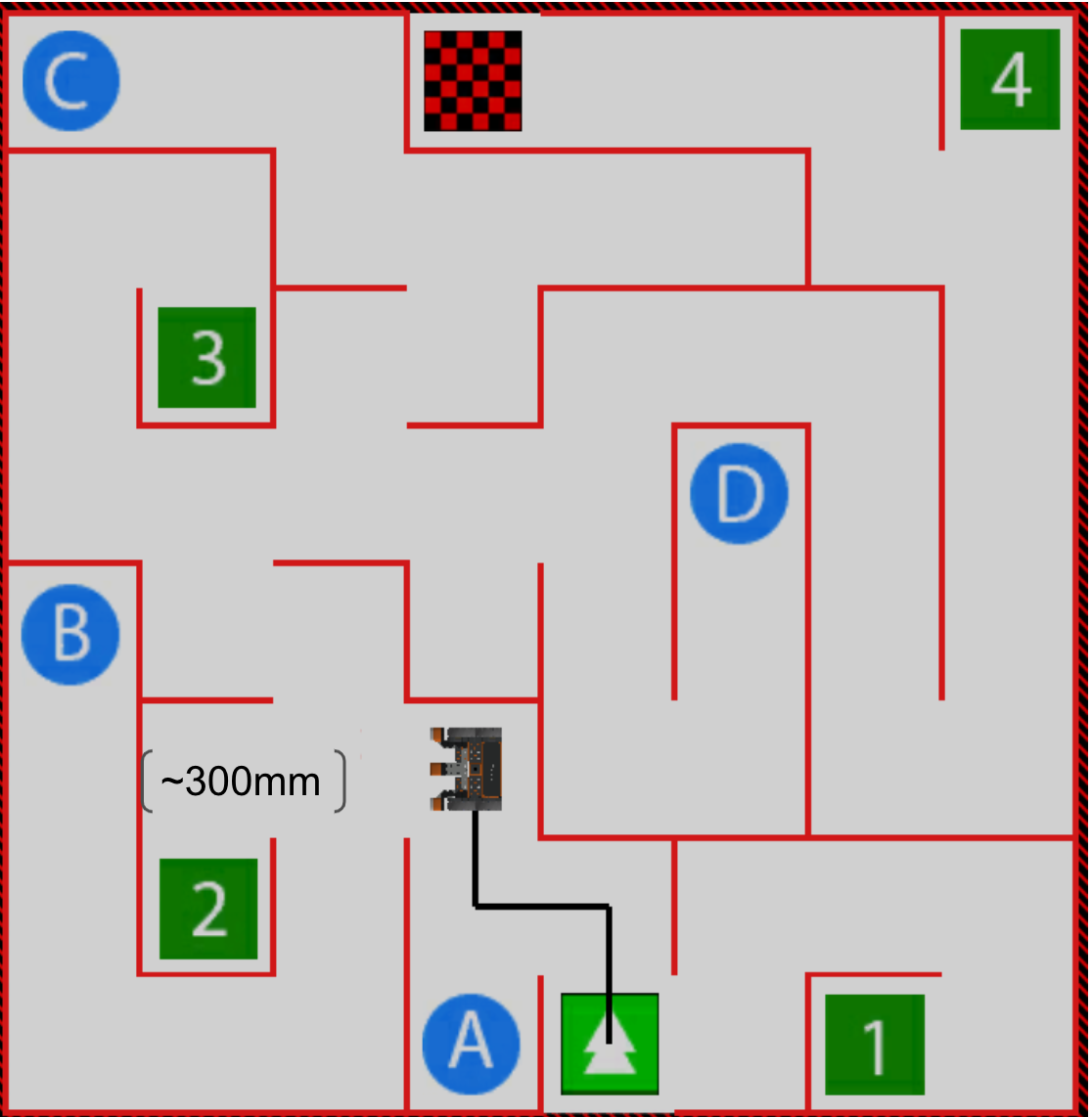
while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - আমরা অনুমান করতে পারি যে পরবর্তী প্রাচীর থেকে গোলকধাঁধায় আমাদের কাঙ্ক্ষিত বাঁকের স্থানের দূরত্ব প্রায় 300 মিলিমিটার (মিমি)।
আপনার তথ্যের জন্য
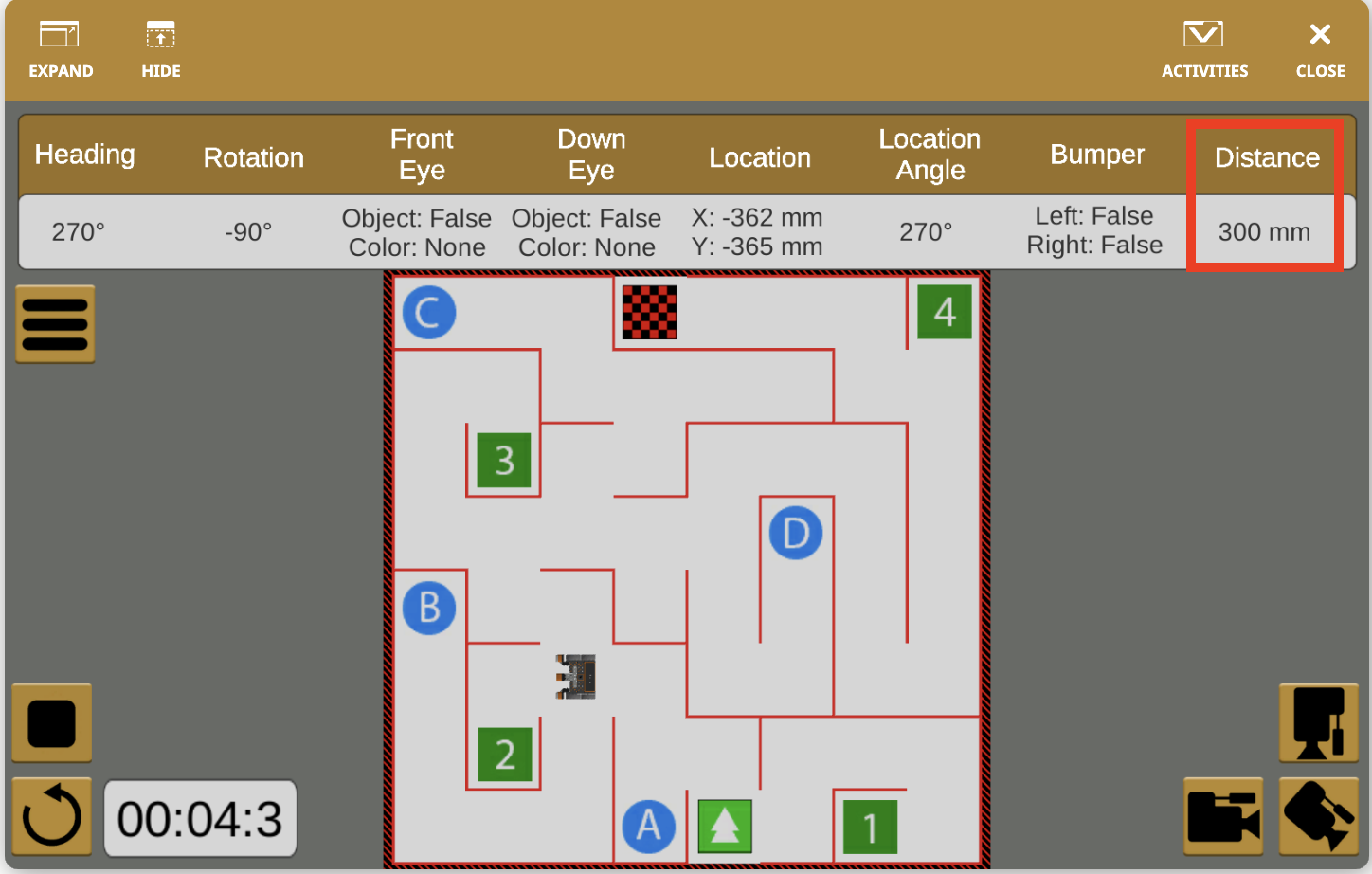
কোনো বস্তু থেকে VR রোবটের দূরত্ব অনুমান করতে আপনি ড্যাশবোর্ডে রিপোর্ট করা দূরত্ব সেন্সর ডেটা ব্যবহার করতে পারেন। VR রোবট আপনার কাঙ্খিত স্থানে পৌঁছালে আপনার প্রজেক্ট বন্ধ করুন। একবার বন্ধ হয়ে গেলে, ড্যাশবোর্ডের মানগুলি VR রোবটের সেন্সর মানগুলি প্রদর্শন করবে যেখানে এটি বর্তমানে অবস্থিত। এটি সেন্সর মান পর্যবেক্ষণ করতে এবং একটি নির্দিষ্ট সময়ে ভিআর রোবট এবং একটি বস্তুর মধ্যে দূরত্ব কল্পনা করতে ব্যবহার করা যেতে পারে।
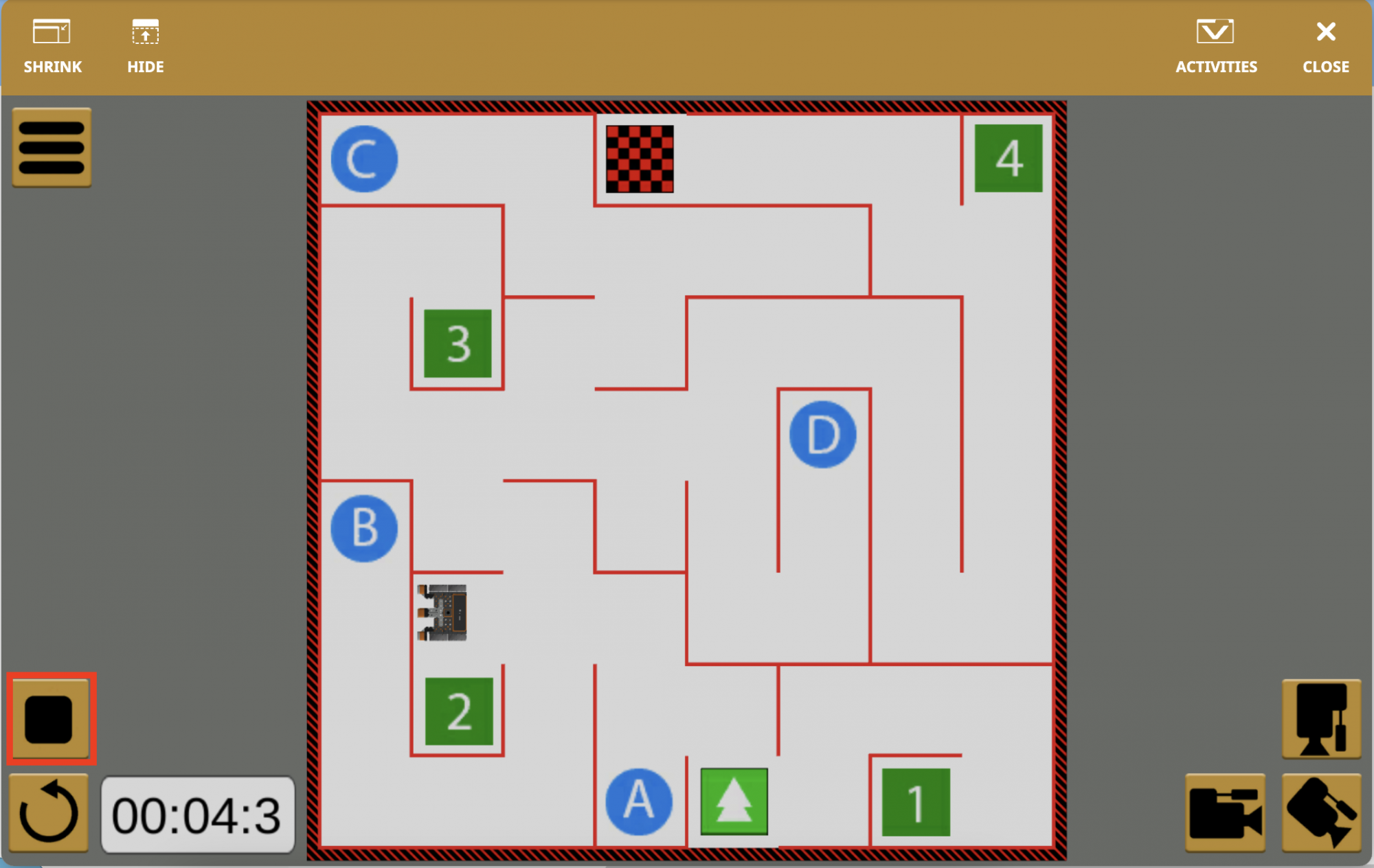
ভিআর রোবট যখন একটি নির্দিষ্ট বিন্দুতে পৌঁছায় তখন প্রকল্পটি বন্ধ করে দিলে, আপনি রিয়েল টাইমে দূরত্ব সেন্সরটি কোন মান রিপোর্ট করছে তা দেখার জন্য প্রকল্পটি থামাতে সক্ষম হবেন। ওয়াল ধাঁধাঁর ক্ষেত্রে, এই মানটি (>) এর চেয়ে বেশি অপারেটরে ব্যবহার করা যেতে পারে যাতে VR রোবটকে প্রাচীর থেকে আরও দূরত্বে থামানো যায়।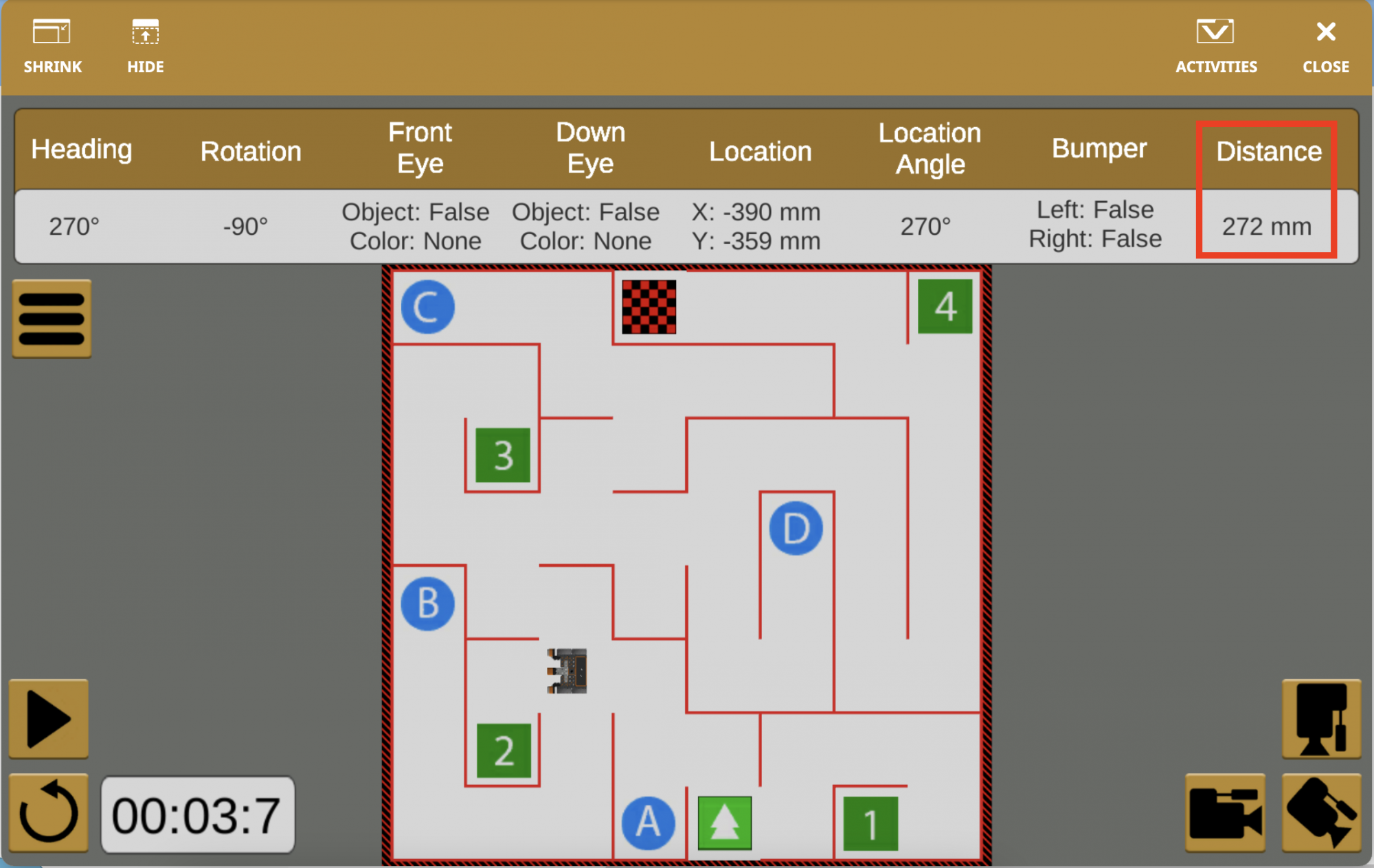
-
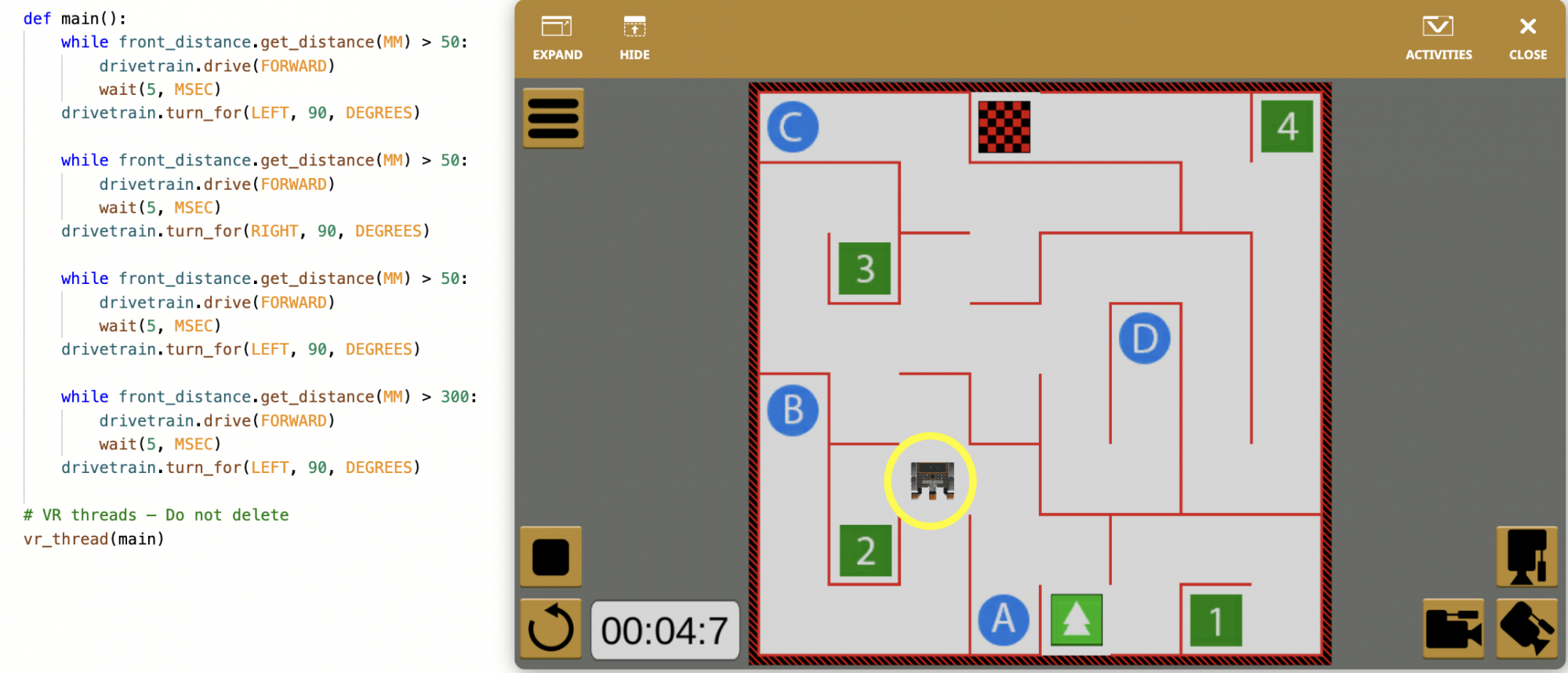
নীচে দেখানো হিসাবে, চূড়ান্ত while লুপ তুলনা অপারেটরের মান 300 মিলিমিটার (মিমি) এ সামঞ্জস্য করুন। এর ফলে ভিআর রোবটটি দেয়ালের দূরত্ব ৩০০ মিলিমিটারের বেশি থাকা সত্ত্বেও সামনের দিকে এগিয়ে যেতে পারবে। যখন এটি ৩০০ মিলিমিটারের কম হবে, তখন VR রোবটটি ওয়াল মেজে কাঙ্ক্ষিত বাঁকের স্থানে বাম দিকে ঘুরবে।
while front_distance.get_distance(MM) > 300: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - যদিWall Maze Playgroundখোলা না থাকে, তাহলে সেটি চালু করুন এবং প্রকল্পটি চালান। লক্ষ্য করুন কিভাবে VR রোবটটি পছন্দসই মোড়ের অবস্থানে বাম দিকে ঘুরছে, যাতে এটি গোলকধাঁধা দিয়ে 'B' অক্ষরে চালিয়ে যেতে প্রস্তুত হয়।
- এরপর, আপনার প্রকল্পে নিম্নলিখিত কমান্ডগুলি যোগ করুন, চূড়ান্ত turn_for কমান্ডের পরে, যাতে VR রোবট 'B' অক্ষরের দিকে তার পথে চলতে থাকে। নিশ্চিত করুন যে while লুপগুলি সঠিকভাবে ইন্ডেন্ট করা আছে।
-
while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(ডান, 90, DEGREES) while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(ডান, 90, DEGREES) while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() -
ওয়াল মেজ প্লেগ্রাউন্ড চালু করুন যদি এটি ইতিমধ্যে খোলা না থাকে এবং আবার প্রকল্পটি চালান।

- VR রোবট এখন Wall Maze Playground এর শুরু থেকে ড্রাইভ করে এবং 'B' অক্ষরে থামে।
- লক্ষ্য করুন যে ডান অপারেন্ডটি 300 মিলিমিটারে পরিবর্তন করার ফলে VR রোবটটি দেয়াল থেকে আরও দূরে ঘুরতে সক্ষম হয়েছিল, যা সঠিক স্থানে ঘুরতে প্রয়োজনীয় ছিল।
- ড্যাশবোর্ডে উল্লেখিত দূরত্বের মান ব্যবহার করে দেখা যাবে যে 'B' অক্ষরে পৌঁছানোর জন্য যখন ঘুরতে হয় তখন VR রোবটটি দেয়াল থেকে কত দূরে ছিল।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।