
Lección 3: Girar a una distancia adicional
Navegación hasta la ubicación de giro
-
Agregue los siguientes comandos a su proyecto, después del último comando turn_for . Asegúrese de que la sangría de los bucles mientras que coincida con los del proyecto. Puede copiar y pegar en o desde su proyecto existente, o escribirlos en el Espacio de trabajo.
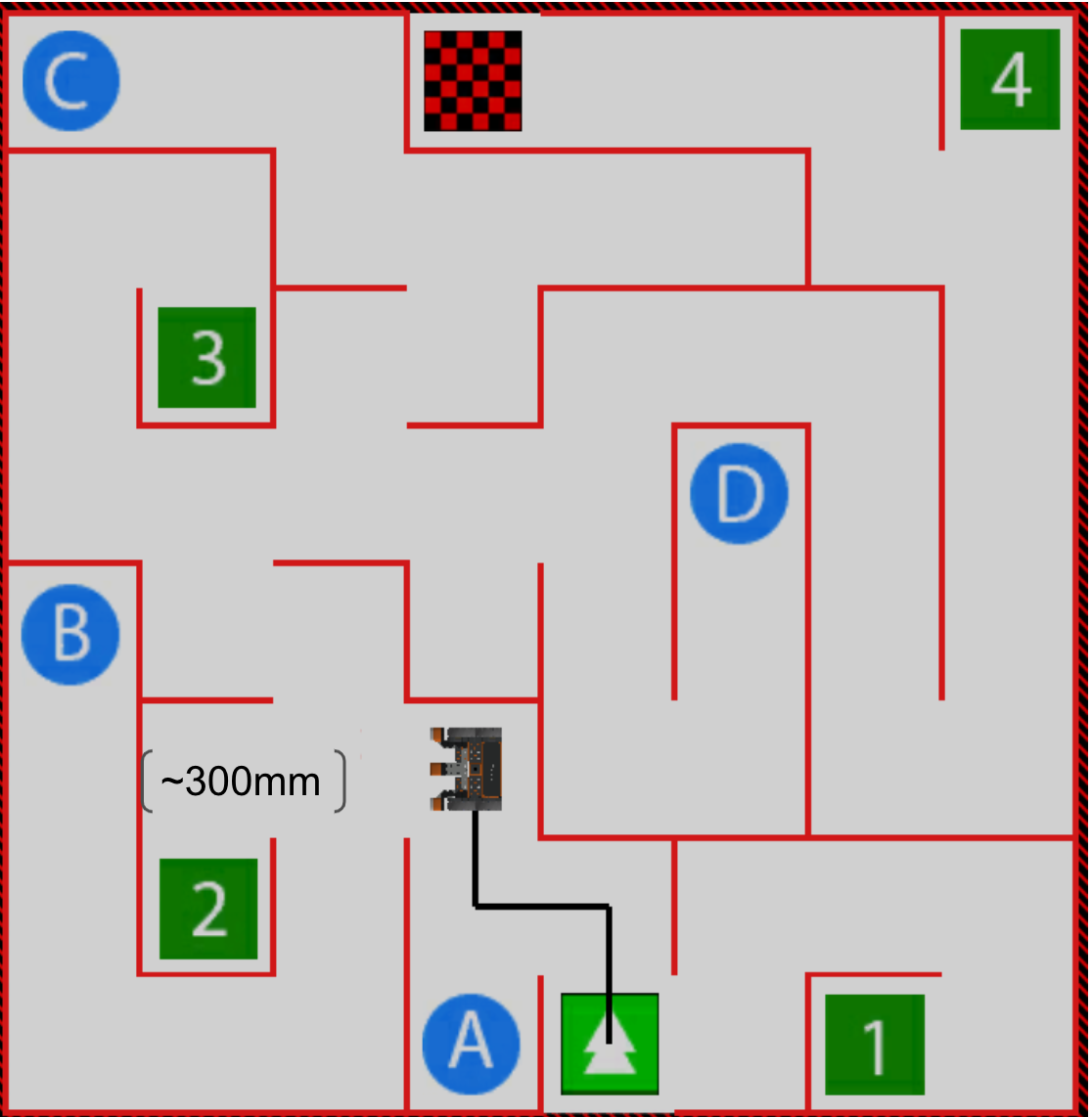
while front_distance.get_distance(MM) > 50: drivetrain.drive(ADELANTE) espere(5, MSEC) drivetrain.turn_for(IZQUIERDA, 90, GRADOS) - Podemos estimar que la distancia desde la siguiente pared hasta nuestra ubicación de giro deseada en el laberinto es de aproximadamente 300 milímetros (mm).
Para su información
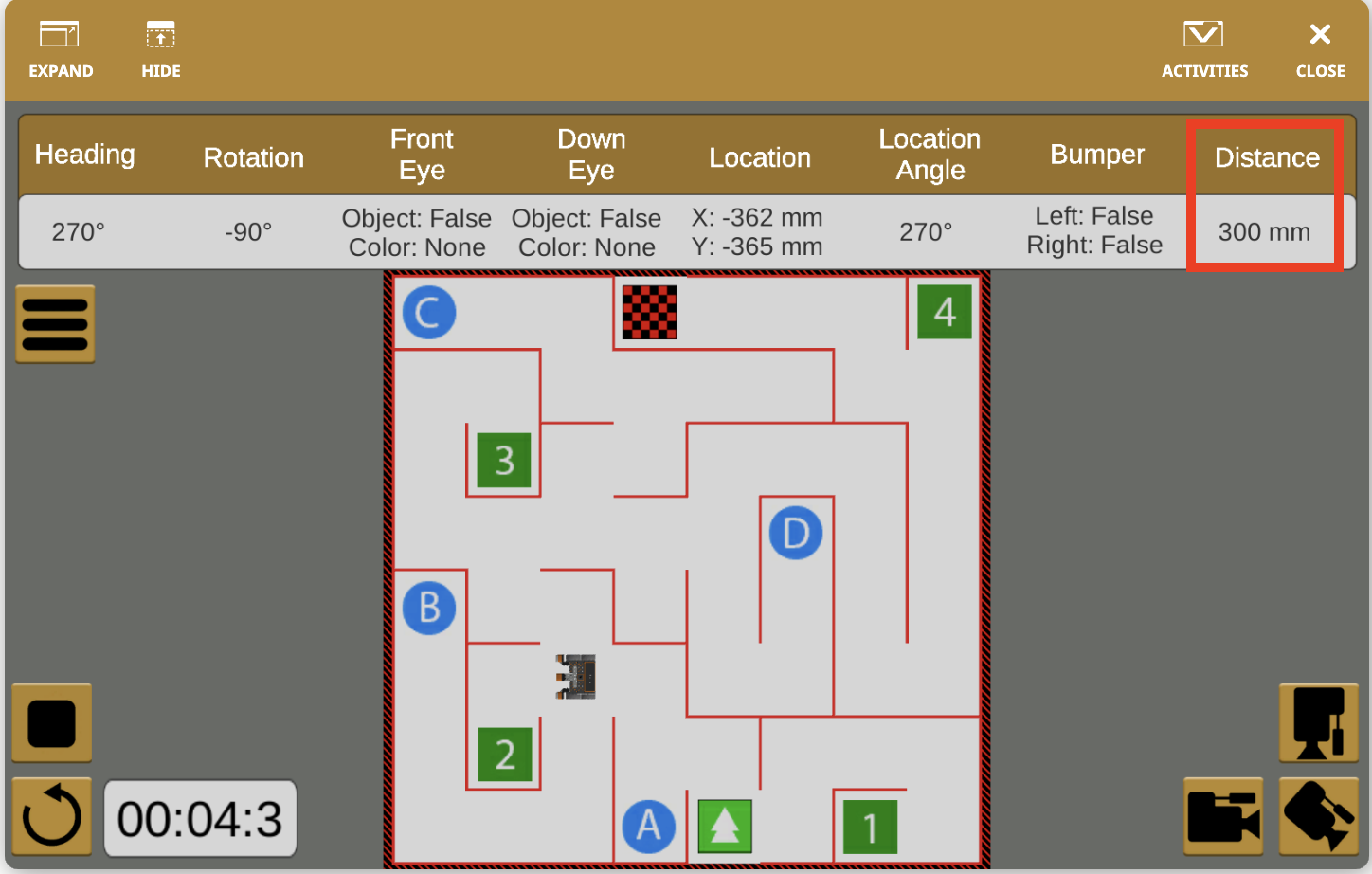
Puede utilizar los datos del sensor de distancia como se informa en el panel de control para estimar la distancia a la que se encuentra el robot de realidad virtual de un objeto. Detenga su proyecto cuando el robot VR llegue a la ubicación deseada. Una vez detenido, los valores en el Panel de control mostrarán los valores del sensor para el Robot VR donde se encuentra actualmente. Esto se puede utilizar para observar los valores del sensor, así como para visualizar la distancia entre el robot VR y un objeto en un momento determinado.
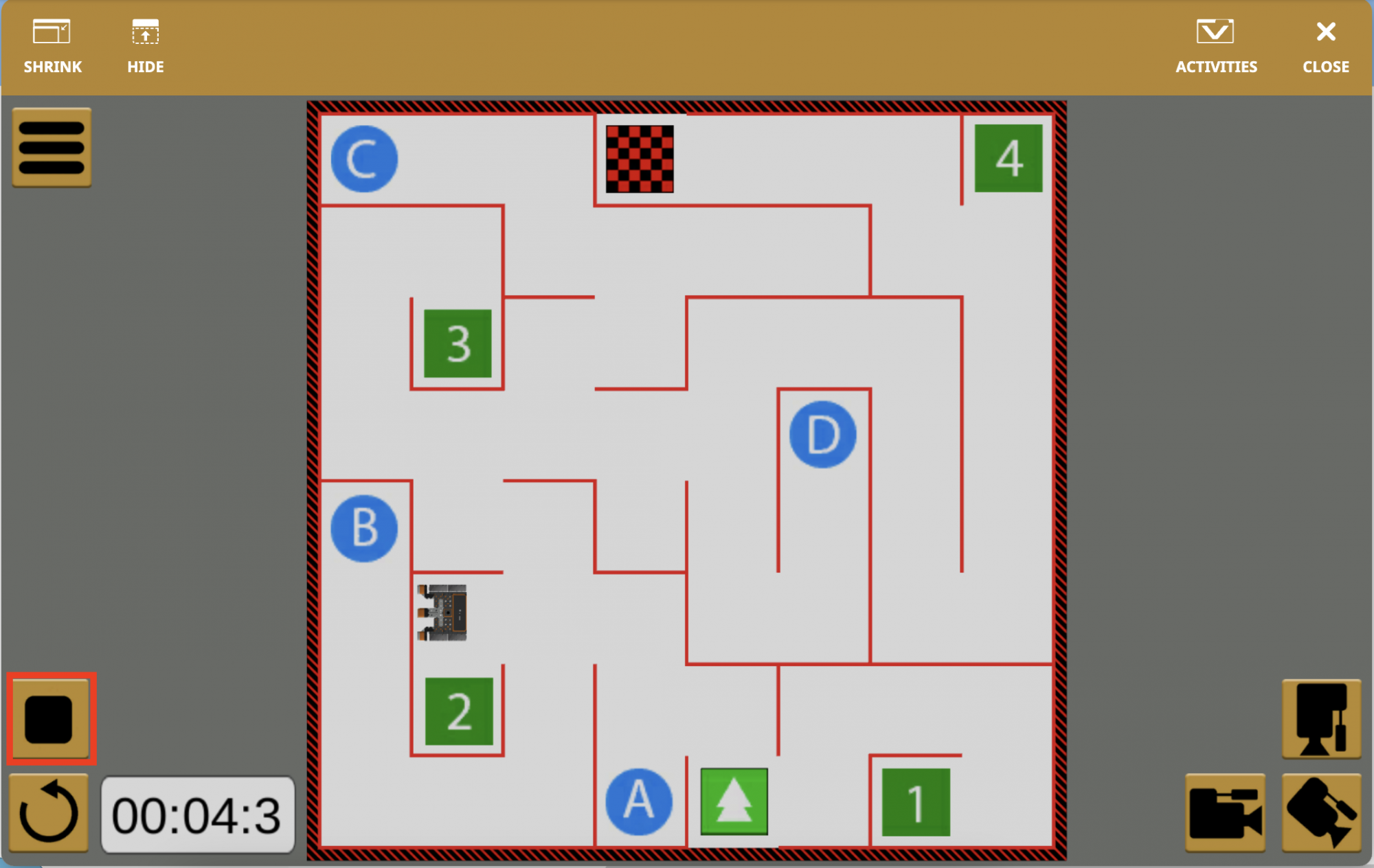
Detener el proyecto cuando el robot VR alcanza un punto específico, le permite pausar el proyecto para ver qué valor está reportando el sensor de distancia en tiempo real. En el caso del laberinto de pared, este valor se puede utilizar en el operador mayor que (>) para hacer que el robot VR se detenga a una distancia adicional de la pared.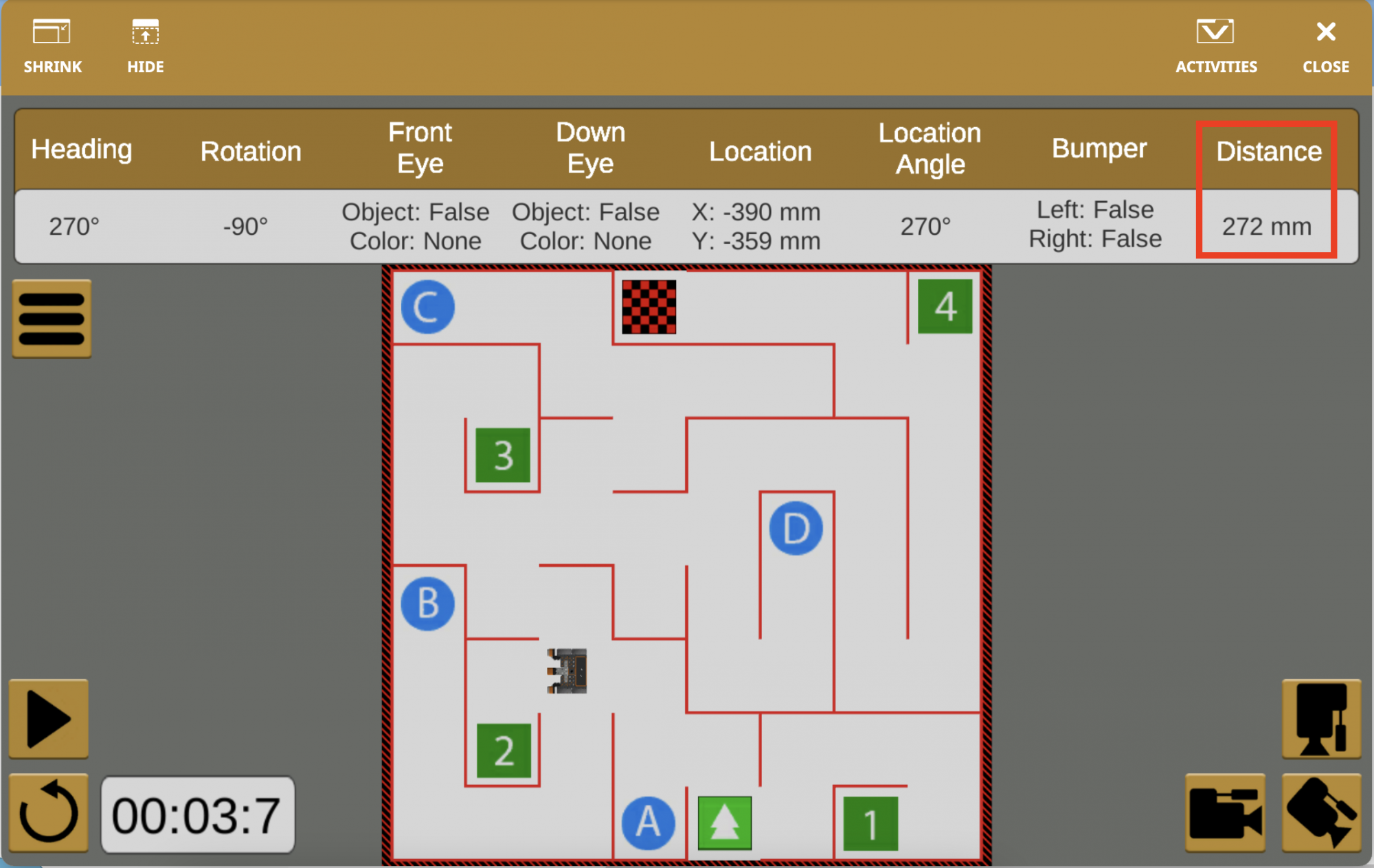
-
Ajuste el valor del operador de comparación de bucle final mientras a 300 milímetros (mm), como se muestra a continuación. Esto permitirá que el robot VR avance mientras la distancia a la pared sea superior a 300 milímetros. Cuando sea inferior a 300 milímetros, el robot VR girará a la izquierda, en la ubicación de giro deseada en el laberinto de pared.
while front_distance.get_distance(MM) > 300: drivetrain.drive(ADELANTE) espere(5, MSEC) drivetrain.turn_for(IZQUIERDA, 90, GRADOS) - Inicie el Wall Maze Playground si aún no está abierto y ejecute el proyecto. Observe cómo el robot VR gira a la izquierda en la ubicación de giro deseada, de modo que esté listo para continuar a través del laberinto hasta la letra "B".
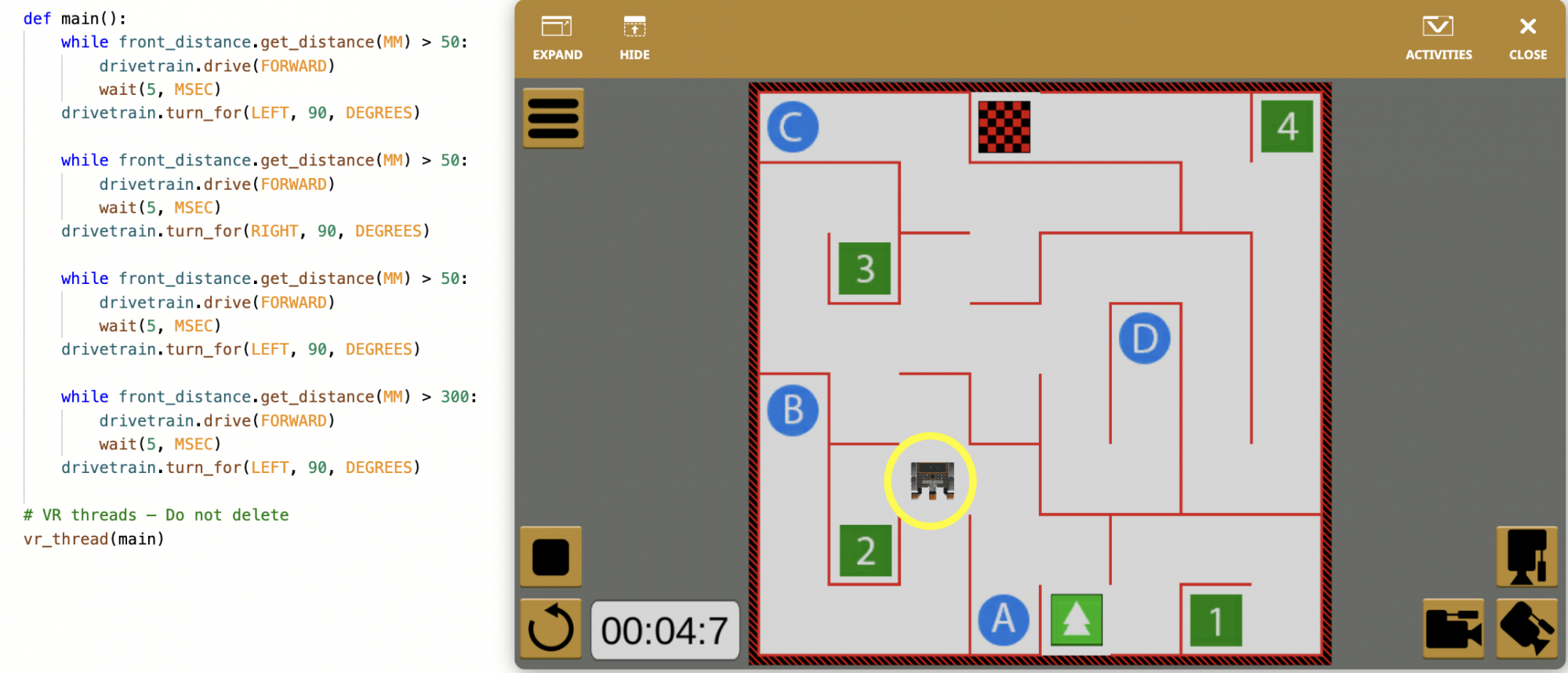
- A continuación, agregue los siguientes comandos a su proyecto, después del comando final turn_for , para que el robot VR continúe su camino hacia la letra 'B'. Asegúrese de que los bucles y estén sangrados correctamente.
-
while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for (RIGHT, 90, DEGREES) while front_distance.get_distance (MM) > 50: drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.turn_for (RIGHT, 90, DEGREES) while front_distance.get_distance (MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() -
Inicie el Wall Maze Playground si aún no está abierto y vuelva a ejecutar el proyecto.

- El robot de realidad virtual ahora conduce desde el inicio del patio de recreo del laberinto de paredes y se detiene en la letra "B".
- Tenga en cuenta que cambiar el operando derecho a 300 milímetros permitió que el robot VR girara a una distancia más alejada de la pared, lo que era necesario para girar en la ubicación correcta.
- El valor de distancia informado en el panel de control se puede utilizar para observar qué tan lejos estaba el robot de realidad virtual de una pared cuando necesitaba girar para llegar a la letra "B".
Seleccione el botón Siguiente para continuar con el resto de esta lección.