
الدرس 3: انتقل إلى العنوان
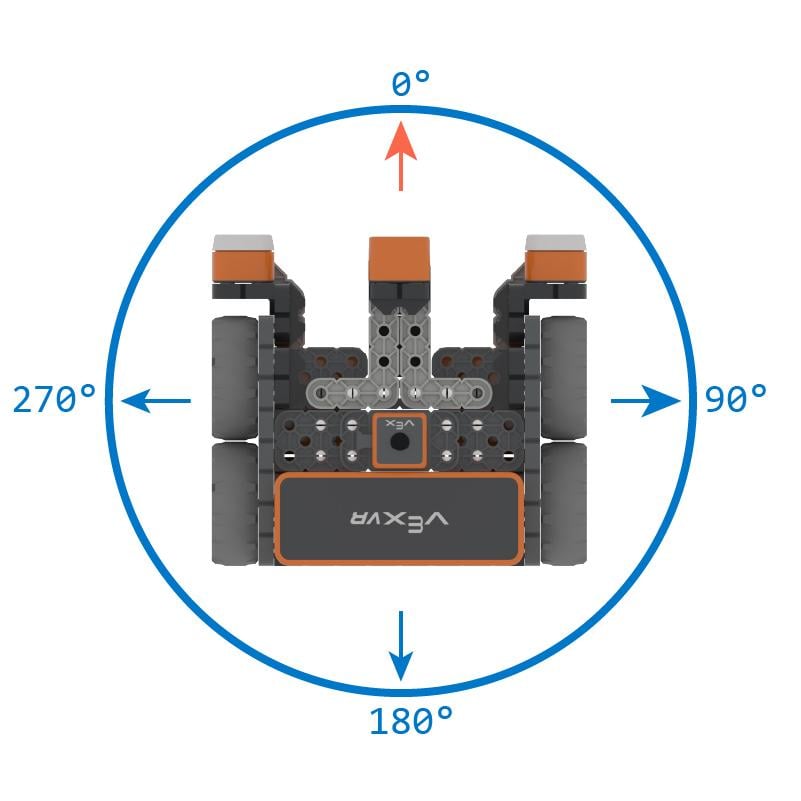
يمكن أيضًا استخدام الأمر turn_to_heading لتدوير روبوت الواقع الافتراضي. يحول هذا الأمر روبوت الواقع الافتراضي إلى اتجاه معين في اتجاه عقارب الساعة بين 0 و 359.99 درجة. عندما يصطدم روبوت الواقع الافتراضي بالقلعة، فقد ينحرف عن مساره. يضمن الأمر turn_to_heading أن روبوت الواقع الافتراضي سوف يستدير لمواجهة القلعة التالية بغض النظر عما حدث سابقًا.
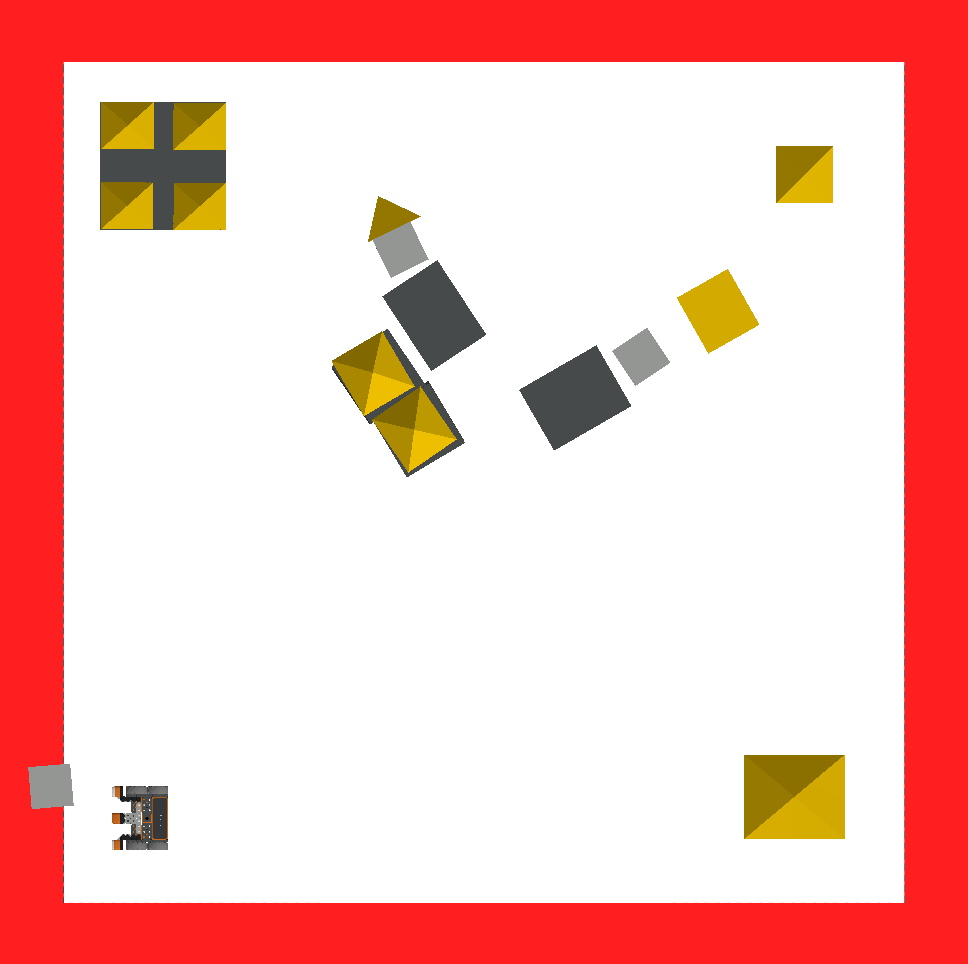
في هذا المثال، سيتحرك روبوت الواقع الافتراضي لإسقاط المبنى المركزي، ثم يستدير ويسقط المبنى الموجود في الزاوية اليسرى السفلية في Castle Crasher Playground.

-
قم بإزالة الأمرين السفليين من المشروع. يجب أن يبدو مشروعك الآن كما يلي:
# Add project code in "main" def main (): drivetrain.set_drive_velocity (100, PERCENT) drivetrain.set_turn_velocity (100, PERCENT) drivetrain.drive_for (FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) -
اسحب أو اكتب الأمر turn_to_heading بعد الأمر drive_ for. اضبط معلمات أمر turn_to_heading على 270 درجة. يجب أن يبدو مشروعك الآن كما يلي:
# Add project code in "main" def main (): drivetrain.set_drive_velocity (100, PERCENT) drivetrain.set_turn_velocity (100, PERCENT) drivetrain.drive_for (FORWARD, 800, MM) drivetrain.drive_for (REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) -
اسحب أو اكتب drive_for الأمر وأرفقه أسفل الأمر turn_to_ heading. اضبط معلمات DRIVE_FOR COMMAND للقيادة للأمام 700 ملليمتر (مم). يجب أن يبدو مشروعك الآن كما يلي:
# Add project code in "main" def main (): drivetrain.set_drive_velocity ( 100, PERCENT) drivetrain.set_turn_velocity (100, PERCENT) drivetrain.drive_for (FORWARD, 800, MM) drivetrain.drive_for (REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - قم بتحديد زر "فتح الملعب" لتشغيل Castle Crasher Playground إذا لم
يكن مفتوحًا بالفعل.

- حدد زر "ابدأ" لاختبار المشروع.

-
شاهد روبوت الواقع الافتراضي يتحرك للأمام ويصطدم بالمبنى المركزي قبل العودة إلى البداية. ثم يتحول روبوت الواقع الافتراضي إلى اتجاه 270 درجة ويتحرك للأمام ليصطدم بالمبنى في الزاوية اليسرى السفلية من Castle Crasher Playground.
تحدي صغير
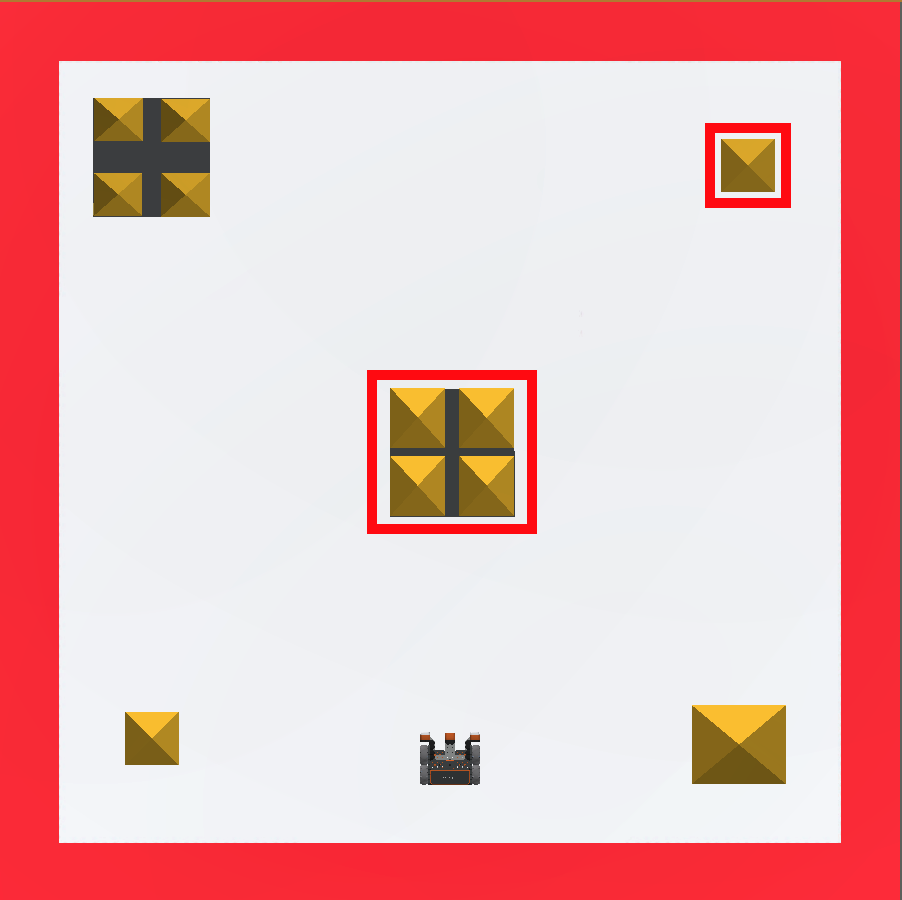
بالنسبة لهذا التحدي الصغير، يجب أن يصطدم روبوت الواقع الافتراضي بالمبنى الأوسط والمبنى الموجود في أعلى يمين قلعة Crasher Playground. سيتم إعطاؤك مشروعًا، ولكن هناك خطأ. قم بتعديل المشروع لحل التحدي المصغر!
اتبع هذه الخطوات لإكمال التحدي المصغر:
-
يوضح مقطع الفيديو أدناه كيف يجب أن يتحرك روبوت الواقع الافتراضي للإطاحة بمجموعتي الكتل. يجب أن يقود الروبوت مباشرة إلى الأمام عبر المجموعة الوسطى من الكتل لإسقاطها، ثم يستدير يمينًا ويقود إلى الأمام في المجموعة اليمنى العليا من الكتل لإسقاطها أيضًا.
ملف فيديو -
أنشئ هذا المشروع عن طريق إضافة أو إزالة الأوامر اللازمة إلى مشروع Unit2Lesson3.
# Add project code in "main" def main (): drivetrain.set_drive_velocity ( 100, PERCENT) drivetrain.set_turn_velocity (100, PERCENT) drivetrain.drive_for (FORWARD, 1550, MM) drivetrain.turn_for (RIGHT, 180, DEGREES) drivetrain.drive_for (FORWARD, 700, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) - ابدأ المشروع لمعرفة مكان الخطأ في التعليمة البرمجية.
- عدِّل الرمز وحاول مرة أخرى. استمر في هذه العملية حتى يكتمل التحدي المصغر.
- بمجرد اصطدام روبوت الواقع الافتراضي بنجاح بالمبنى الأوسط والمبنى الموجود في الجزء العلوي الأيمن من Castle Crasher Playground، احفظ المشروع.
- احفظ المشروع قبل المتابعة.
تهانينا! لقد حللت التحدي الصغير!