
3과: 헤딩으로 전환
turn_to_heading명령은 VR 로봇을 돌리는 데에도 사용할 수 있습니다. 이 명령은 VR 로봇을 0~359.99도 사이의 시계 방향으로 돌립니다. VR 로봇이 성과 충돌하면 진로를 잃을 수 있습니다. turn_to_heading명령은 이전에 무슨 일이 있었든 VR 로봇이 다음 성을 향해 돌아서도록 보장합니다.
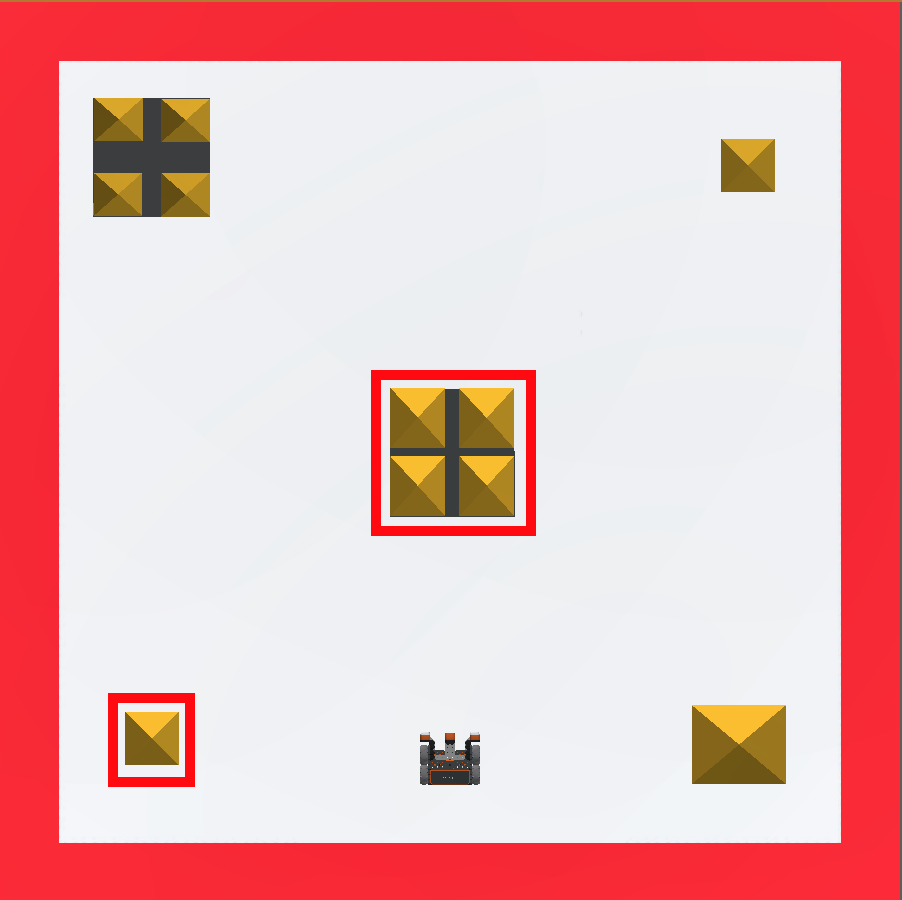
이 예시에서는 VR 로봇이 중앙 건물을 쓰러뜨리고, 돌아서 Castle Crasher Playground의 왼쪽 하단 모서리에 있는 건물을 쓰러뜨립니다.
-
프로젝트에서 아래쪽 두 명령을 제거합니다. 이제 프로젝트는 다음과 같이 보일 것입니다.
# "main"에 프로젝트 코드 추가 def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) -
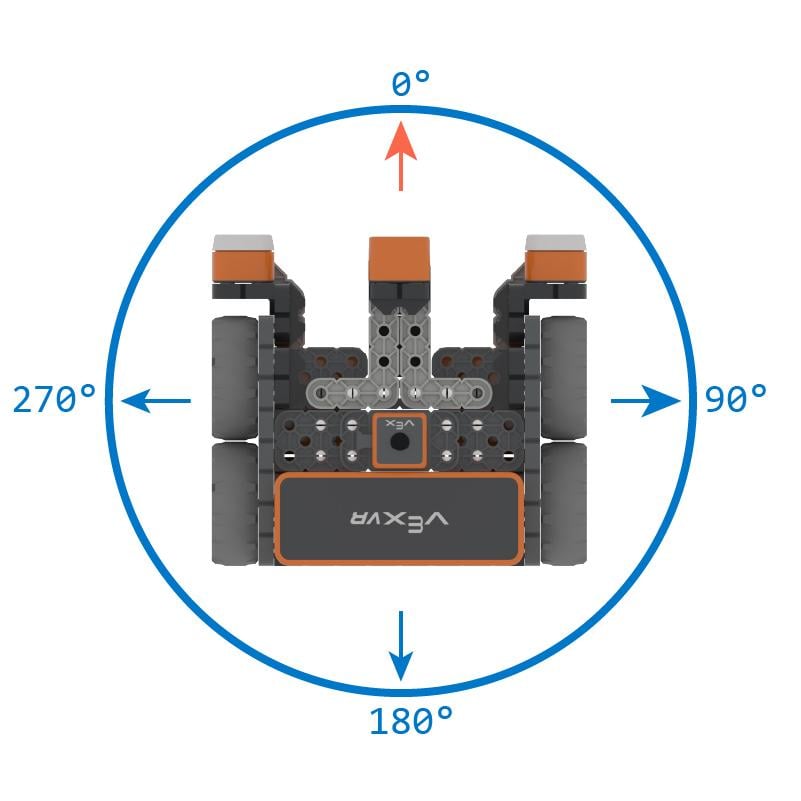
drive_for명령 뒤에 turn_to_heading명령을 드래그하거나 입력하세요. turn_to_heading명령의 매개변수를 270도로 설정합니다. 이제 프로젝트는 다음과 같이 보일 것입니다.
# "main"에 프로젝트 코드 추가 def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) -
drive_for 명령을 드래그하거나 입력한 다음 turn_to_heading명령 아래에 첨부합니다. drive_for명령의 매개변수를 700밀리미터(mm) 전진으로 설정합니다. 이제 프로젝트는 다음과 같이 보일 것입니다.
# "main"에 프로젝트 코드 추가 def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - 아직 열려 있지 않으면 Castle Crasher Playground 을 시작하려면 "Playground 열기" 버튼을 선택하세요.

- 프로젝트를 테스트하려면 "시작" 버튼을 선택하세요.

-
VR 로봇이 앞으로 나아가 중앙 건물과 충돌한 후 다시 시작 지점으로 돌아가는 모습을 지켜보세요. VR 로봇은 270도 각도로 회전한 후 앞으로 이동하여 Castle Crasher Playground의 왼쪽 하단 모서리에 있는 건물과 충돌합니다.
미니 챌린지
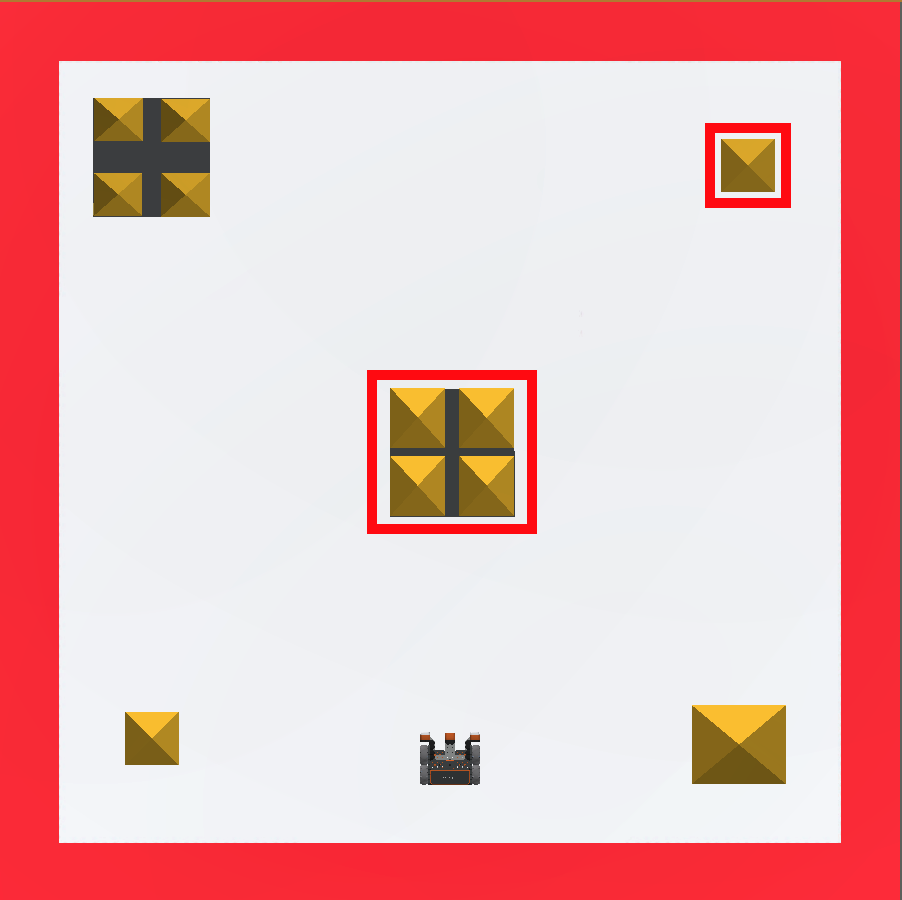
이 미니 챌린지에서는 VR 로봇이 Castle Crasher Playground의 가운데 건물과 오른쪽 상단 건물과 충돌해야 합니다. 프로젝트가 주어지지만 오류가 있습니다. 프로젝트를 편집하여 미니 챌린지를 해결하세요!
미니 챌린지를 완료하려면 다음 단계를 따르세요.
-
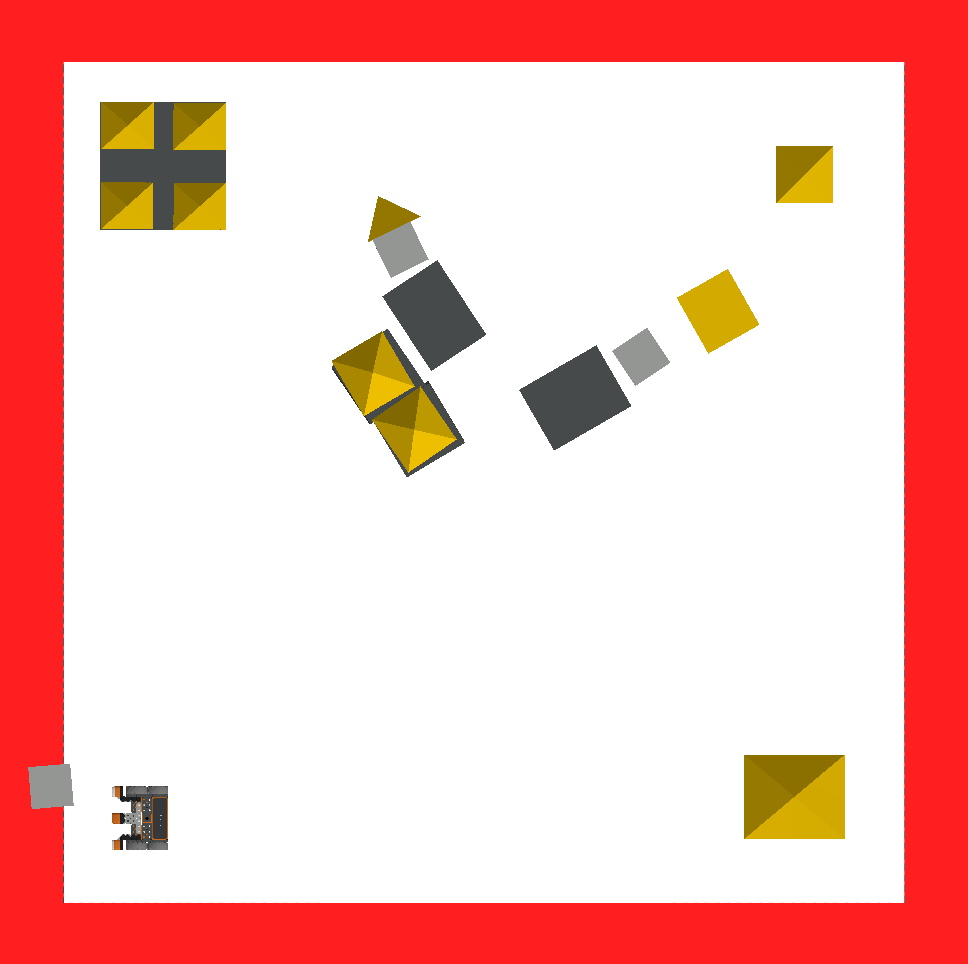
아래 비디오 클립은 VR 로봇이 두 세트의 블록을 무너뜨리기 위해 어떻게 움직여야 하는지 보여줍니다. 로봇은 가운데 블록을 통과해 직진해서 블록을 쓰러뜨린 다음, 오른쪽으로 돌아서 오른쪽 위쪽 블록으로 전진해서 역시 블록을 쓰러뜨려야 합니다.
비디오 파일 -
Unit2Lesson3 프로젝트에 필요한 명령을 추가하거나 제거하여 이 프로젝트를 만드세요.
# "main"에 프로젝트 코드 추가 def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 1550, MM) drivetrain.turn_for(RIGHT, 180, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) - 프로젝트를 시작하여 코드에서 오류가 있는 위치를 확인하세요.
- 코드를 편집하고 다시 시도하세요. 미니 챌린지가 완료될 때까지 이 과정을 계속하세요.
- VR 로봇이 Castle Crasher Playground의 중앙 건물과 오른쪽 상단 건물과 성공적으로 충돌하면 프로젝트를 저장합니다.
- 계속하기 전에 프로젝트를 저장하세요.
축하해요! 미니 챌린지를 해결했습니다!