
പാഠം 3: തലക്കെട്ടിലേക്ക് തിരിയുക
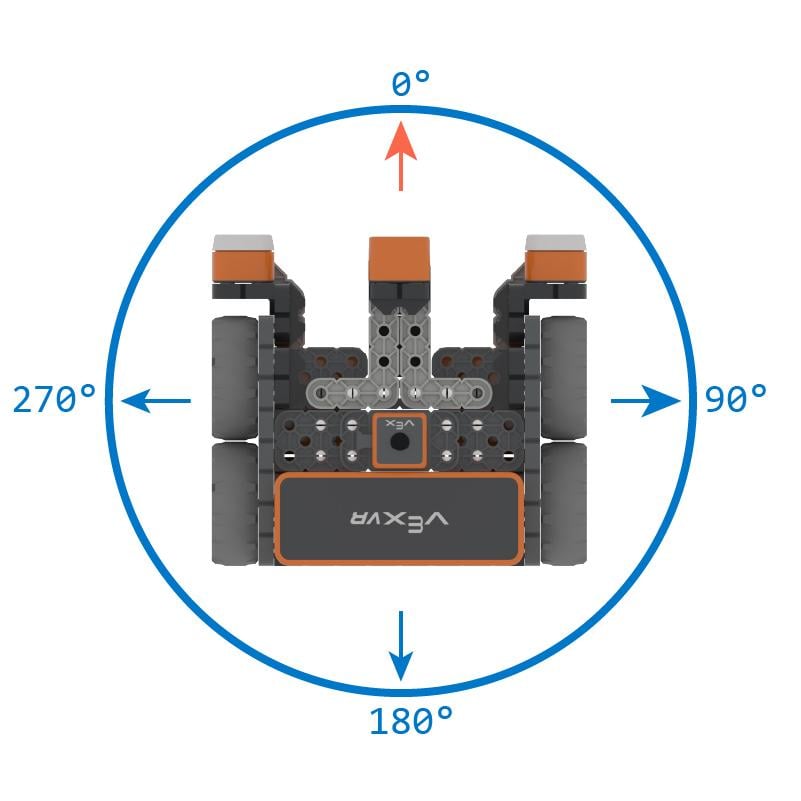
VR റോബോട്ടിനെ തിരിക്കാൻ turn_to_headingകമാൻഡും ഉപയോഗിക്കാം. ഈ കമാൻഡ് VR റോബോട്ടിനെ 0 നും 359.99 ഡിഗ്രിക്കും ഇടയിൽ ഘടികാരദിശയിൽ തിരിക്കുന്നു. ഒരു VR റോബോട്ട് ഒരു കോട്ടയുമായി കൂട്ടിയിടിക്കുമ്പോൾ, അത് ദിശ തെറ്റി വീണേക്കാം. turn_to_headingകമാൻഡ്, മുമ്പ് എന്ത് സംഭവിച്ചാലും VR റോബോട്ട് അടുത്ത കോട്ടയെ അഭിമുഖീകരിക്കുമെന്ന് ഉറപ്പാക്കുന്നു.
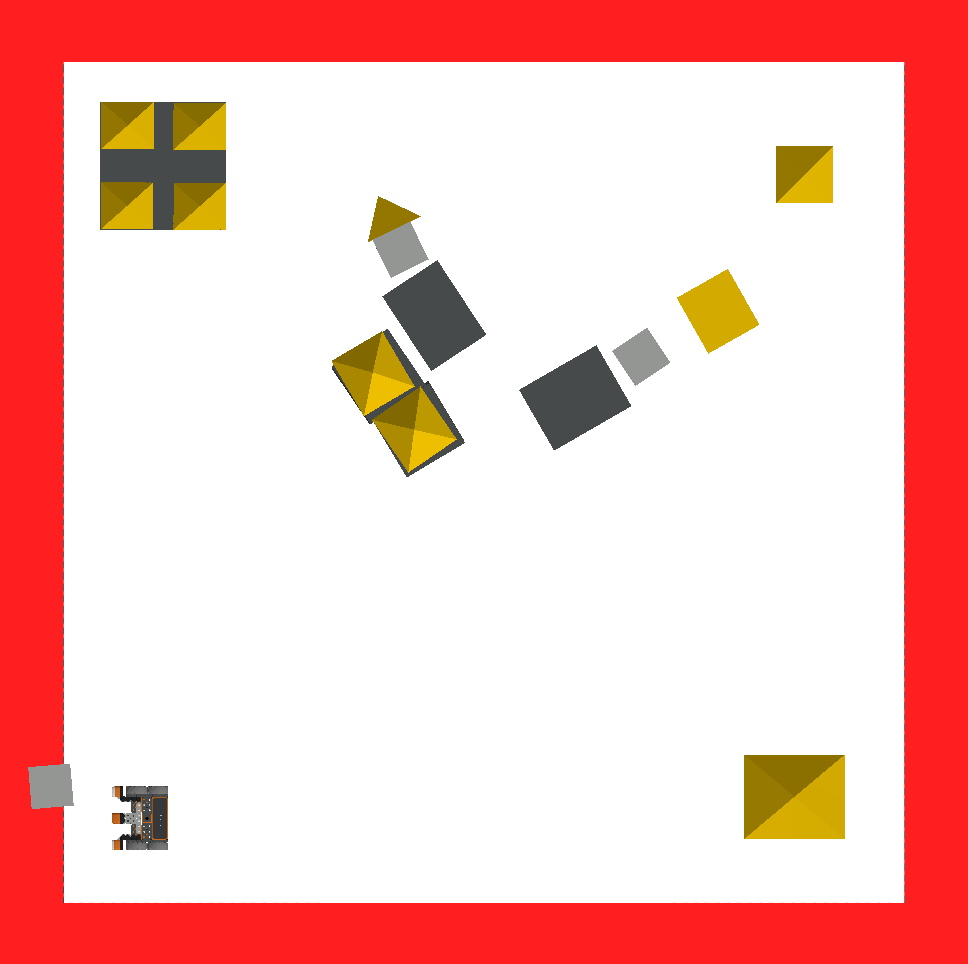
ഈ ഉദാഹരണത്തിൽ, കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട്ൽ, മധ്യഭാഗത്തെ കെട്ടിടത്തെ മറിഞ്ഞ് താഴെ ഇടത് മൂലയിലുള്ള കെട്ടിടത്തെ മറിഞ്ഞ്
-
പ്രോജക്റ്റിൽ നിന്ന് താഴെയുള്ള രണ്ട് കമാൻഡുകൾ നീക്കം ചെയ്യുക. നിങ്ങളുടെ പ്രോജക്റ്റ് ഇപ്പോൾ ഇതുപോലെ ആയിരിക്കണം:
# "main"-ൽ പ്രോജക്റ്റ് കോഡ് ചേർക്കുക def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) -
drive_forകമാൻഡിന് ശേഷം turn_to_headingകമാൻഡ് ഡ്രാഗ് ചെയ്യുക അല്ലെങ്കിൽ ടൈപ്പ് ചെയ്യുക. turn_to_headingകമാൻഡിന്റെ പാരാമീറ്ററുകൾ 270 ഡിഗ്രിയിലേക്ക് സജ്ജമാക്കുക. നിങ്ങളുടെ പ്രോജക്റ്റ് ഇപ്പോൾ ഇതുപോലെ ആയിരിക്കണം:
# "main" എന്നതിൽ പ്രോജക്റ്റ് കോഡ് ചേർക്കുക def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) -
drive_for കമാൻഡ് ഡ്രാഗ് ചെയ്യുകയോ ടൈപ്പ് ചെയ്യുകയോ ചെയ്ത് turn_to_headingകമാൻഡിന് താഴെയായി അറ്റാച്ചുചെയ്യുക. 700 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) മുന്നോട്ട് ഡ്രൈവ് ചെയ്യുന്നതിന് drive_forകമാൻഡിന്റെ പാരാമീറ്ററുകൾ സജ്ജമാക്കുക. നിങ്ങളുടെ പ്രോജക്റ്റ് ഇപ്പോൾ ഇതുപോലെ ആയിരിക്കണം:
# "main" എന്നതിൽ പ്രോജക്റ്റ് കോഡ് ചേർക്കുക def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട് ഇതിനകം തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിക്കുന്നതിന് "ഓപ്പൺ പ്ലേഗ്രൗണ്ട്" ബട്ടൺ തിരഞ്ഞെടുക്കുക.

- പ്രോജക്റ്റ് പരീക്ഷിക്കാൻ "ആരംഭിക്കുക" ബട്ടൺ തിരഞ്ഞെടുക്കുക.

-
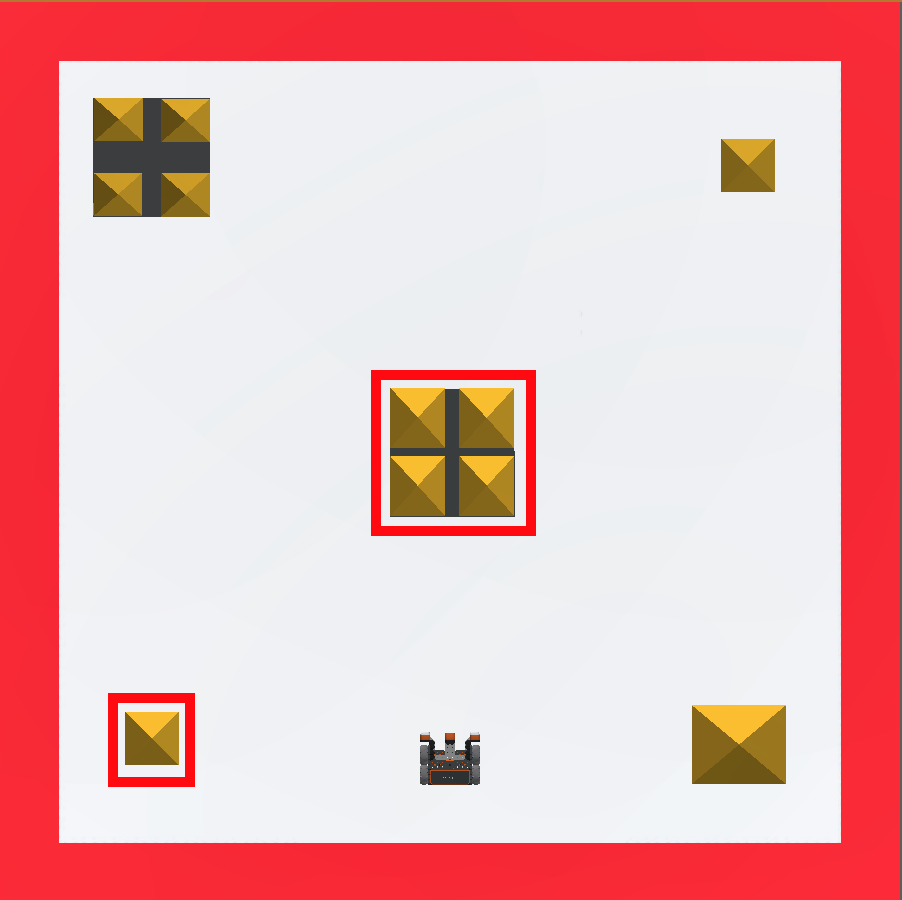
VR റോബോട്ട് മുന്നോട്ട് നീങ്ങുന്നതും സെന്റർ കെട്ടിടത്തിൽ ഇടിക്കുന്നതും തിരികെ തുടക്കത്തിലേക്ക് മടങ്ങുന്നതും കാണുക. തുടർന്ന് VR റോബോട്ട് 270 ഡിഗ്രി തലക്കെട്ടിലേക്ക് തിരിഞ്ഞ് മുന്നോട്ട് ഓടിച്ച് കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട്ന്റെ താഴെ ഇടത് മൂലയിലുള്ള കെട്ടിടത്തിൽ ഇടിക്കും.
മിനി ചലഞ്ച്
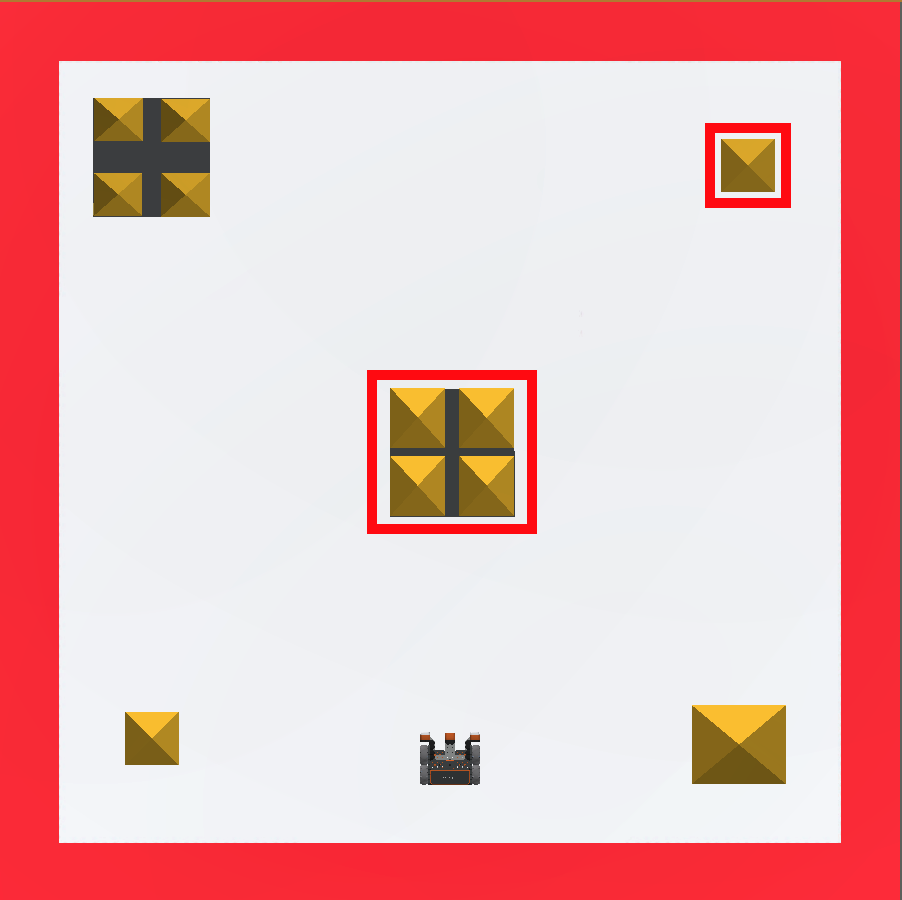
ഈ മിനി ചലഞ്ചിനായി, VR റോബോട്ട് മധ്യഭാഗത്തെ കെട്ടിടത്തിലും Castle Crasher Playgroundന്റെ മുകളിൽ വലതുവശത്തുള്ള കെട്ടിടത്തിലും കൂട്ടിയിടിക്കണം. നിങ്ങൾക്ക് ഒരു പ്രോജക്റ്റ് നൽകും, പക്ഷേ ഒരു പിശകുണ്ട്. മിനി ചലഞ്ച് പരിഹരിക്കാൻ പ്രോജക്റ്റ് എഡിറ്റ് ചെയ്യുക!
മിനി ചലഞ്ച് പൂർത്തിയാക്കാൻ ഈ ഘട്ടങ്ങൾ പാലിക്കുക:
-
താഴെയുള്ള വീഡിയോ ക്ലിപ്പ്, രണ്ട് സെറ്റ് ബ്ലോക്കുകളും മറിച്ചിടാൻ VR റോബോട്ട് എങ്ങനെ നീങ്ങണമെന്ന് കാണിക്കുന്നു. മധ്യത്തിലുള്ള ബ്ലോക്കുകളിലൂടെ റോബോട്ട് നേരെ മുന്നോട്ട് ഓടിച്ച് അവയെ മറിച്ചിടണം, തുടർന്ന് വലത്തേക്ക് തിരിഞ്ഞ് മുകളിൽ വലതുവശത്തുള്ള ബ്ലോക്കുകളിലേക്ക് മുന്നോട്ട് ഓടിച്ച് അവയെ മറിച്ചിടണം.
വീഡിയോ ഫയൽ -
Unit2Lesson3 പ്രോജക്റ്റിലേക്ക് ആവശ്യമായ കമാൻഡുകൾ ചേർത്തോ നീക്കം ചെയ്തോ ഈ പ്രോജക്റ്റ് സൃഷ്ടിക്കുക.
# "main" എന്നതിൽ പ്രോജക്റ്റ് കോഡ് ചേർക്കുക def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 1550, MM) drivetrain.turn_for(RIGHT, 180, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) - കോഡിൽ എവിടെയാണ് പിശക് ഉള്ളതെന്ന് കാണാൻ പ്രോജക്റ്റ് ആരംഭിക്കുക.
- കോഡ് എഡിറ്റ് ചെയ്ത് വീണ്ടും ശ്രമിക്കുക. മിനി ചലഞ്ച് പൂർത്തിയാകുന്നതുവരെ ഈ പ്രക്രിയ തുടരുക.
- VR റോബോട്ട് മധ്യഭാഗത്തെ കെട്ടിടത്തിലും Castle Crasher Playgroundന്റെ മുകളിൽ വലതുവശത്തുള്ള കെട്ടിടത്തിലും വിജയകരമായി കൂട്ടിയിടിച്ചുകഴിഞ്ഞാൽ, പ്രോജക്റ്റ് സംരക്ഷിക്കുക.
- മുന്നോട്ട് പോകുന്നതിനു മുമ്പ് പ്രോജക്റ്റ് സംരക്ഷിക്കുക.
അഭിനന്ദനങ്ങൾ! നിങ്ങൾ മിനി ചലഞ്ച് പരിഹരിച്ചു!
ചോദ്യങ്ങൾ
പാഠ ക്വിസ് ആക്സസ് ചെയ്യുന്നതിന് താഴെയുള്ള ലിങ്ക് തിരഞ്ഞെടുക്കുക.