
Leçon 3 : Se tourner vers le cap
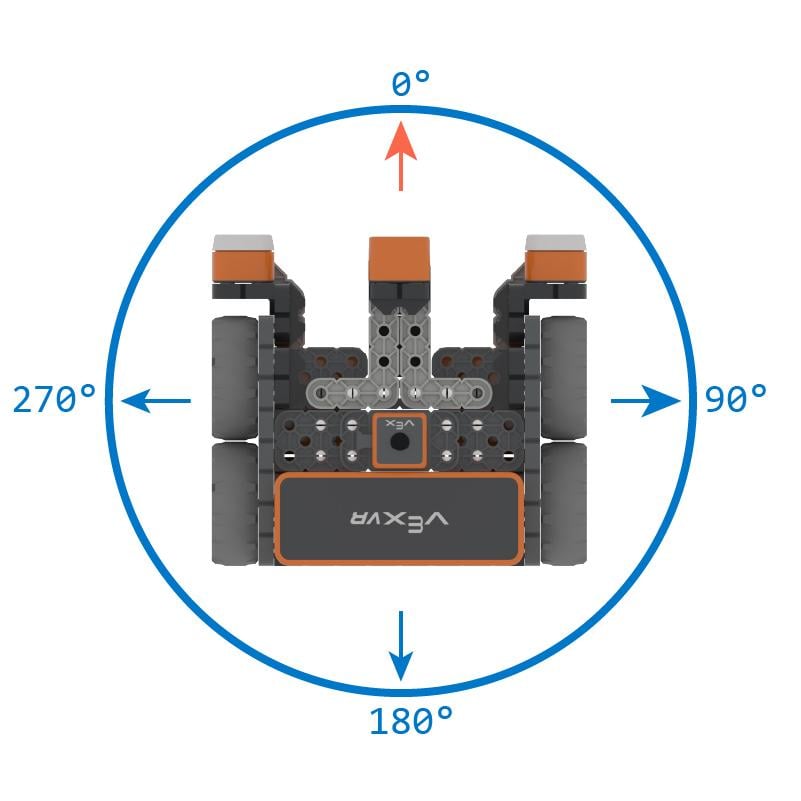
La commande turn_to_heading peut également être utilisée pour faire tourner le robot VR. Cette commande fait passer le robot VR à un cap donné dans le sens des aiguilles d'une montre entre 0 et 359,99 degrés. Lorsqu'un robot VR entre en collision avec un château, il peut dévier de sa trajectoire. La commande turn_to_heading garantit que le robot VR se tournera pour faire face au prochain château, peu importe ce qui s'est passé auparavant.
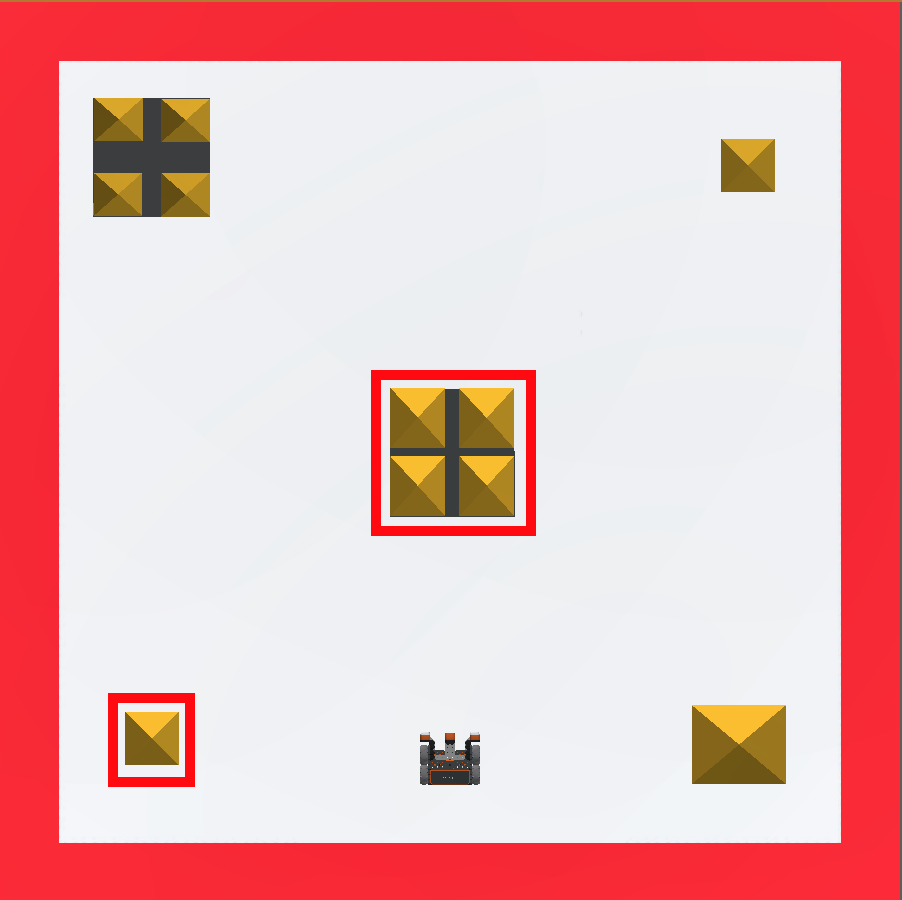
Cet exemple fera bouger le robot VR pour renverser le bâtiment central, puis se retourner et renverser le bâtiment dans le coin inférieur gauche sur le Castle Crasher Playground.
-
Supprimez les deux commandes du bas du projet. Votre projet devrait maintenant ressembler à ceci :
# Add project code in "main" def main() : drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) -
Faites glisser ou tapez la commande turn_to_heading après la commande drive_ for. Définissez les paramètres de la commande turn_to_heading sur 270 degrés. Votre projet devrait maintenant ressembler à ceci :
# Add project code in "main" def main() : drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) -
Faites glisser ou tapez la commande drive_for et attachez-la sous la commande turn_to_heading . Définissez les paramètres de la commande drive_for pour avancer de 700 millimètres (mm). Votre projet devrait maintenant ressembler à ceci :
# Add project code in "main" def main() : drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - Sélectionnez le bouton « Open Playground » pour lancer le Castle Crasher Playground s'il n'est pas déjà ouvert.

- Sélectionnez le bouton « Démarrer » pour tester le projet.

-
Regardez le robot VR avancer et entrer en collision avec le bâtiment central avant de revenir au départ. Le robot VR se tournera ensuite vers un cap de 270 degrés et avancera pour entrer en collision avec le bâtiment dans le coin inférieur gauche du Castle Crasher Playground.
Mini Défi
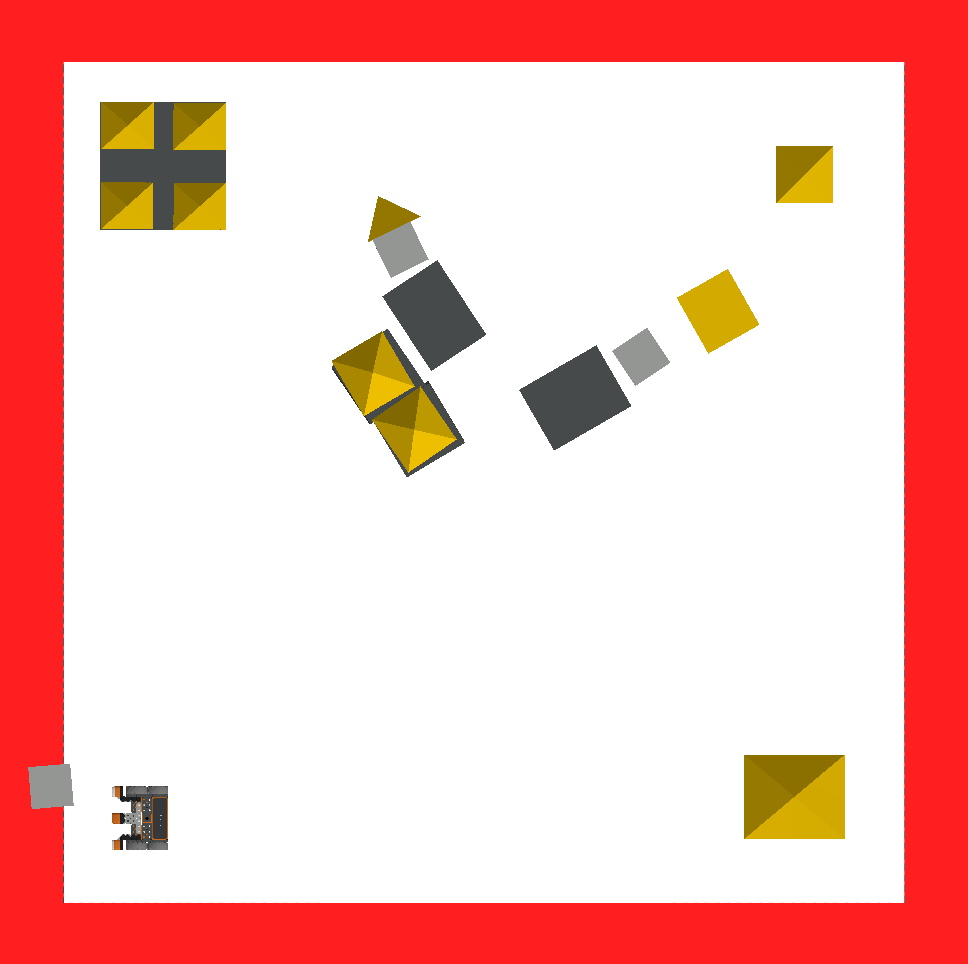
Pour ce mini défi, le robot VR doit entrer en collision avec le bâtiment du milieu et le bâtiment en haut à droite du Castle Crasher Playground. Vous recevrez un projet, mais il y a une erreur. Modifiez le projet pour résoudre le mini défi !

Suivez ces étapes pour terminer le mini défi :
-
Le clip vidéo ci-dessous montre comment le robot VR doit se déplacer pour renverser les deux ensembles de blocs. Le robot doit avancer tout droit à travers l'ensemble de blocs du milieu pour les renverser, puis tourner à droite et avancer dans l'ensemble de blocs en haut à droite pour les renverser également.
Fichier vidéo -
Créez ce projet en ajoutant ou en supprimant les commandes nécessaires au projet Unit2Lesson3.
# Add project code in "main" def main() : drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 1550, MM) drivetrain.turn_for(RIGHT, 180, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) - Démarrez le projet pour voir où se trouve l'erreur dans le code.
- Modifiez le code et réessayez. Continuez ce processus jusqu'à ce que le mini défi soit terminé.
- Une fois que le robot VR entre en collision avec succès avec le bâtiment du milieu et le bâtiment en haut à droite du Castle Crasher Playground, enregistrez le projet.
- Enregistrez le projet avant de continuer.
Félicitations ! Vous avez résolu le mini défi !
Questions
Veuillez sélectionner un lien ci-dessous pour accéder au questionnaire de la leçon.
Google Doc / .docx / .pdf