
Lezione 3: Passare all'intestazione
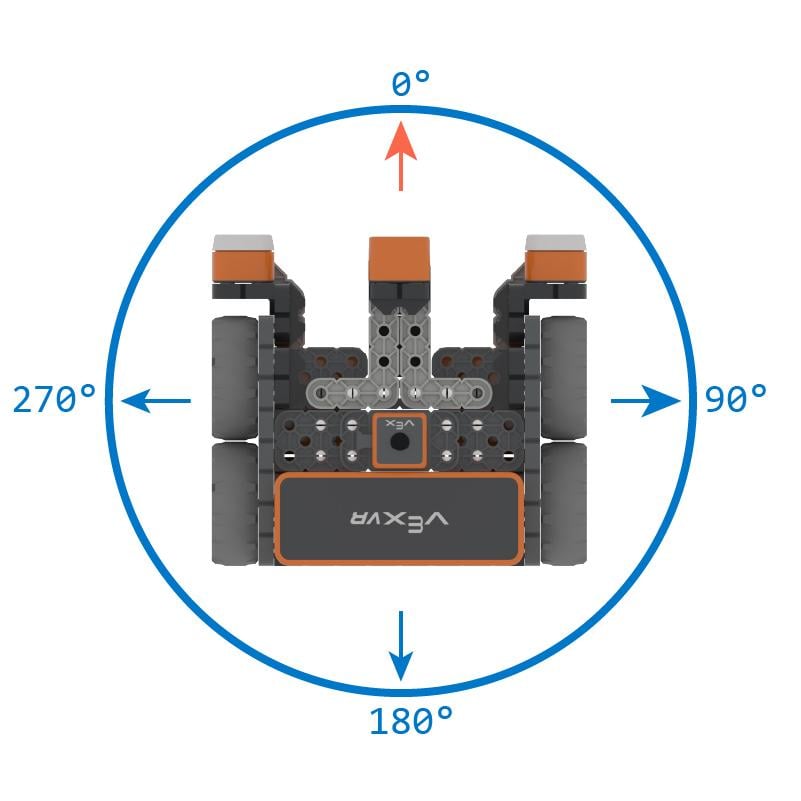
Il comando turn_to_heading può essere utilizzato anche per girare il robot VR. Questo comando trasforma il robot VR in una determinata direzione oraria compresa tra 0 e 359,99 gradi. Quando un robot VR si scontra con un castello, potrebbe andare fuori rotta. Il comando turn_to_heading assicura che il robot VR si girerà verso il castello successivo, indipendentemente da quanto accaduto in precedenza.
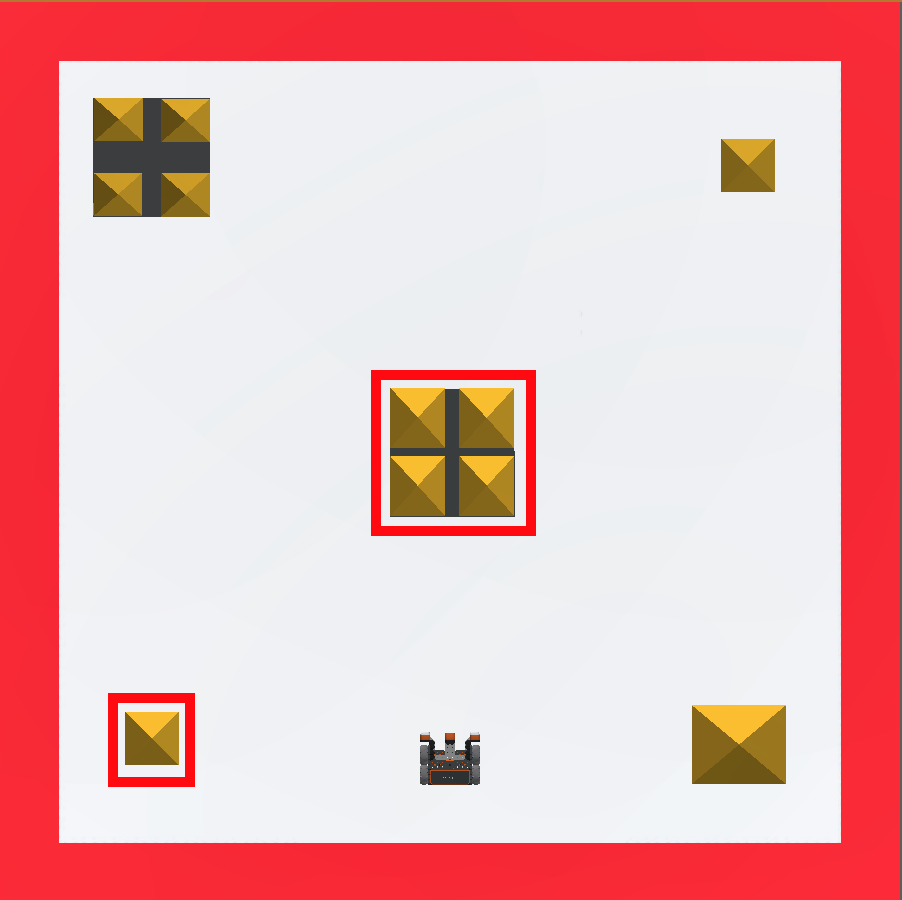
In questo esempio il robot VR si muoverà per abbattere l'edificio centrale, poi si girerà e abbatterà l'edificio nell'angolo in basso a sinistra del parco giochi di Castle Crasher
-
Rimuovere i due comandi inferiori dal progetto. Il tuo progetto dovrebbe assomigliare a questo:
# Add project code in "main" def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) -
Trascinare o digitare il comando turn_to_heading dopo il comando drive_ for. Impostare i parametri del comando turn_to_heading a 270 gradi. Il tuo progetto dovrebbe assomigliare a questo:
# Add project code in "main" def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) -
Trascina o digita il comando drive_for e allegalo sotto il comando turn_to_heading . Impostare i parametri del comando drive_for per avanzare di 700 millimetri (mm). Il tuo progetto dovrebbe assomigliare a questo:
# Add project code in "main" def main(): drivetrain.set_drive_velocity (100, PERCENT) drivetrain.set_turn_velocity (100, PERCENT) drivetrain.drive_for (FORWARD, 800, MM) drivetrain.drive_for (REVERSE, 800, MM) drivetrain.turn_to_heading (270, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - Selezionare il pulsante "Apri Playground" per avviare Castle Crasher Playground se non è già aperto.

- Selezionare il pulsante "Start" per testare il progetto.

-
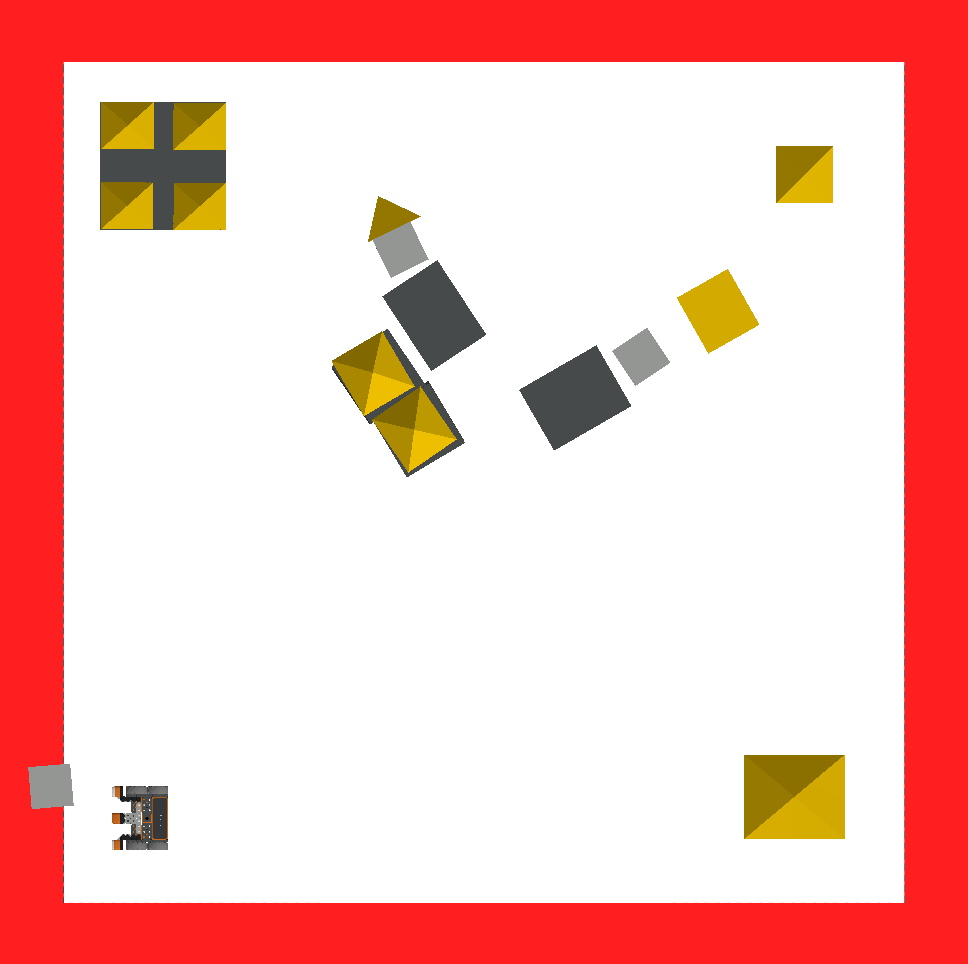
Guarda il robot VR muoversi in avanti e scontrarsi con l'edificio centrale prima di tornare alla partenza. Il robot VR ruoterà quindi di 270 gradi e avanzerà per scontrarsi con l'edificio nell'angolo in basso a sinistra del parco giochi Castle Crasher .
Mini sfida
Per questa mini sfida, il robot VR deve scontrarsi con l'edificio centrale e con quello in alto a destra del parco giochi Castle Crasher . Ti verrà dato un progetto, ma c'è un errore. Modifica il progetto per risolvere la mini sfida!

Segui questi passaggi per completare la mini sfida:
-
Il video clip qui sotto mostra come il robot VR dovrebbe muoversi per rovesciare entrambi i set di blocchi. Il robot dovrebbe guidare dritto attraverso il gruppo centrale di blocchi per farli cadere, quindi girare a destra e guidare in avanti nel gruppo di blocchi in alto a destra per far cadere anche loro.
File video -
Creare questo progetto aggiungendo o rimuovendo i comandi necessari al progetto Unit2Lesson3.
# Add project code in "main" def main(): drivetrain.set_drive_velocity (100, PERCENT) drivetrain.set_turn_velocity (100, PERCENT) drivetrain.drive_for (FORWARD, 1550, MM) drivetrain.turn_for (RIGHT, 180, DEGREES) drivetrain.drive_for (FORWARD, 700, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) - Avvia il progetto per vedere dove si trova l'errore nel codice.
- Modifica il codice e riprova. Continua questo processo fino al completamento della mini sfida.
- Una vez que el robot VR colisione con éxito con el edificio del medio y el edificio en la parte superior derecha del patio de juegos Castle Crasher, guarde el proyecto.
- Salvare il progetto prima di procedere.
Congratulazioni! Hai risolto la mini sfida!