
Lição 3: Voltar para Cabeçalho
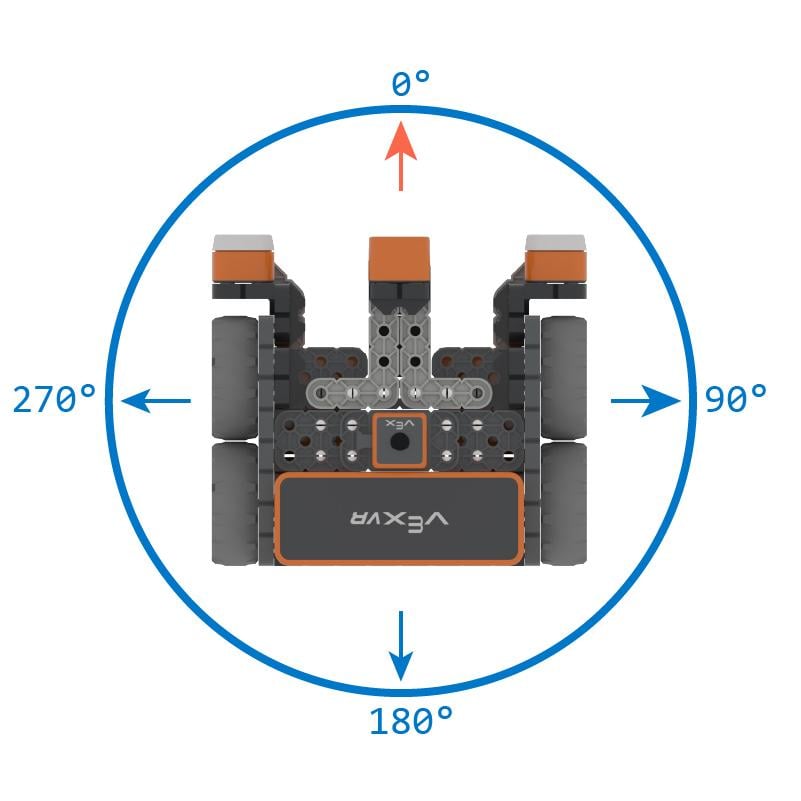
O comando turn_to_heading também pode ser utilizado para virar o robô VR. Este comando gira o Robô VR para um determinado rumo no sentido horário entre 0 e 359,99 graus. Quando um Robô de RV colide com um castelo, ele pode ser desviado do curso. O comando turn_to_heading garante que o robô VR se irá virar para o próximo castelo, independentemente do que tenha acontecido anteriormente.
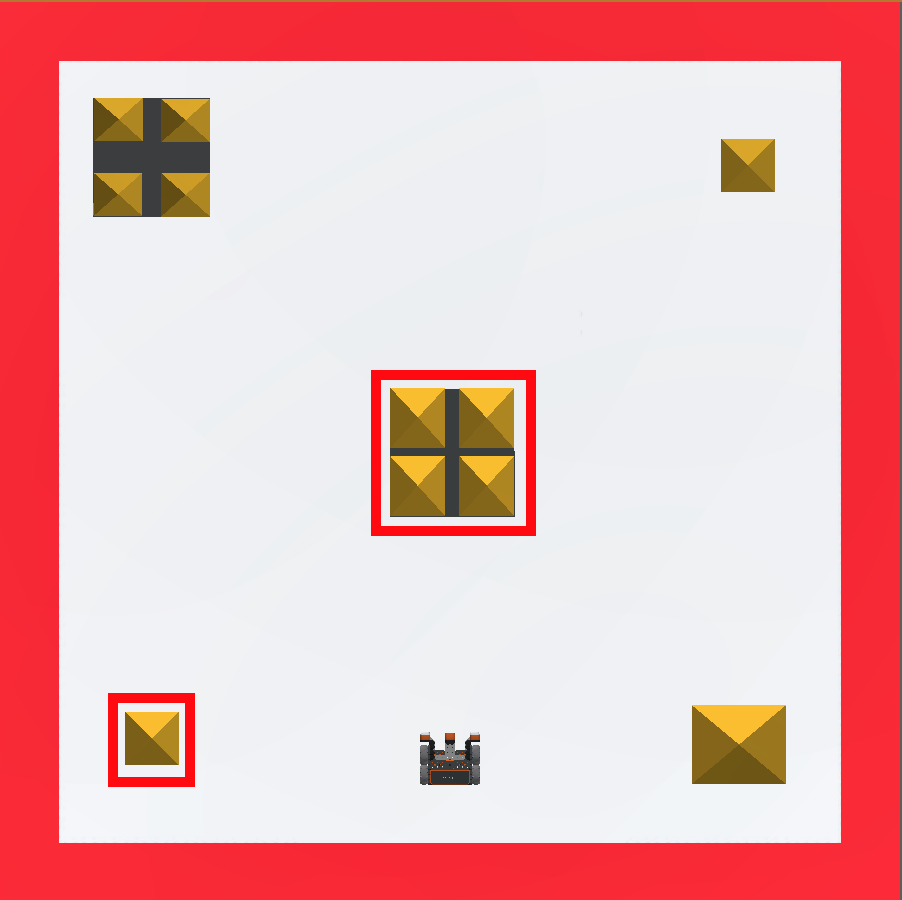
Este exemplo fará com que o Robô de RV se mova para derrubar o prédio central, depois vire e derrube o prédio no canto inferior esquerdo do Castle Crasher Playground.
-
Remova os dois comandos inferiores do projeto. O seu projeto deve agora ter este aspeto:
# Adicione o código do projeto em "main" def main() :drivetrain.set_drive_velocity (100, PERCENT )drivetrain.set_turn_velocity (100, PERCENT )drivetrain.drive_for (FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) -
Arraste ou digite o comando turn_to_heading após o comando drive_ for. Defina os parâmetros do comando turn_to_heading para 270 graus. O seu projeto deve agora ter este aspeto:
# Adicione o código do projeto em "main" def main() :drivetrain.set_drive_velocity (100, PERCENT )drivetrain.set_turn_velocity (100, PERCENT )drivetrain.drive_for (FORWARD, 800, MM )drivetrain.drive_for (REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) -
Arraste ou digite o comando drive_for e anexe-o abaixo do comando turn_to_heading . Defina os parâmetros do comando drive_for para avançar 700 milímetros (mm). O seu projeto deve agora ter este aspeto:
# Adicione o código do projeto em "main" def main( ): drivetrain.set_drive_velocity (100, PERCENT ) drivetrain.set_turn_velocity (100, PERCENT ) drivetrain.drive_for (FORWARD, 800, MM ) drivetrain.drive_for (REVERSE, 800, MM ) drivetrain.turn_to_heading (270, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - Selecione o botão "Abrir Playground" para iniciar o Castle Crasher Playground, se ainda não estiver aberto.

- Seleccione o botão "Iniciar" para testar o projecto.

-
Observe o robô VR avançar e colidir com o edifício central antes de voltar ao início. O VR Robot irá então virar para um rumo de 270 graus e avançar para colidir com o edifício no canto inferior esquerdo do Castle Crasher Playground.

Mini Desafio
Para este mini desafio, o robô VR deve colidir com o edifício do meio e com o edifício no canto superior direito do Castle Crasher Playground. Receberá um projeto, mas há um erro. Edite o projeto para resolver o mini desafio!

Siga estas etapas para concluir o mini desafio:
-
O videoclipe abaixo mostra como o robô VR deve se mover para derrubar ambos os conjuntos de blocos. O robô deve seguir em frente através do conjunto intermediário de blocos para derrubá-los, depois virar à direita e avançar para o conjunto superior direito de blocos para derrubá-los também.
Ficheiro de vídeo -
Crie este projeto adicionando ou removendo os comandos necessários ao projeto Unit2Lesson3.
# Adicione o código do projeto em "main" def main() : drivetrain.set_drive_velocity (100, POR CENTO) drivetrain.set_turn_velocity (100, POR CENTO) drivetrain.drive_for (FORWARD, 1550, MM) drivetrain.turn_for (RIGHT, 180, DEGREES ) drivetrain.drive_for (FORWARD, 700, MM ) drivetrain.turn_for (RIGHT, 90, DEGREES) - Inicie o projeto para ver onde está o erro no código.
- Edite o código e tente novamente. Continue este processo até que o mini desafio seja concluído.
- Assim que o robô VR colidir com sucesso com o edifício do meio e o edifício no canto superior direito do Castle Crasher Playground, guarda o projeto.
- Salve o projeto antes de prosseguir.
Parabéns! Você resolveu o mini desafio!
Perguntas
Selecione uma ligação abaixo para aceder ao questionário da aula.
Google Doc / .docx / .pdf