
পাঠ ৩: শিরোনামে ফিরে যান
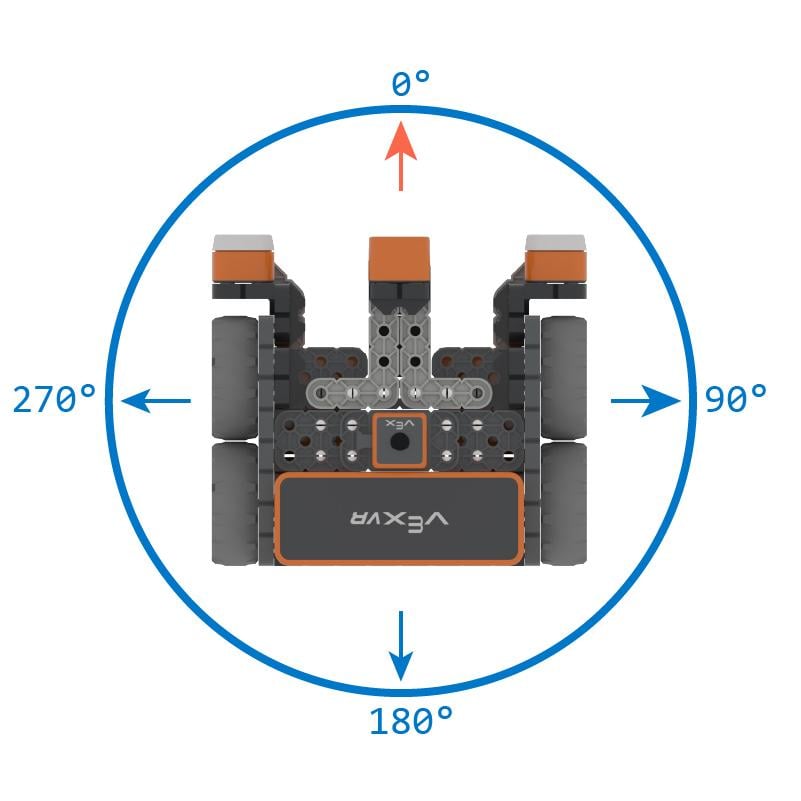
turn_to_headingকমান্ডটি VR রোবটটি ঘুরানোর জন্যও ব্যবহার করা যেতে পারে। এই কমান্ডটি VR রোবটকে 0 থেকে 359.99 ডিগ্রির মধ্যে একটি নির্দিষ্ট ঘড়ির কাঁটার দিকে ঘুরিয়ে দেয়। যখন একটি ভিআর রোবট একটি দুর্গের সাথে সংঘর্ষে লিপ্ত হয়, তখন এটি পথ থেকে বিচ্যুত হতে পারে। turn_to_headingকমান্ড নিশ্চিত করে যে VR রোবটটি পূর্বে যা-ই ঘটুক না কেন, পরবর্তী দুর্গের দিকে মুখ করে থাকবে।
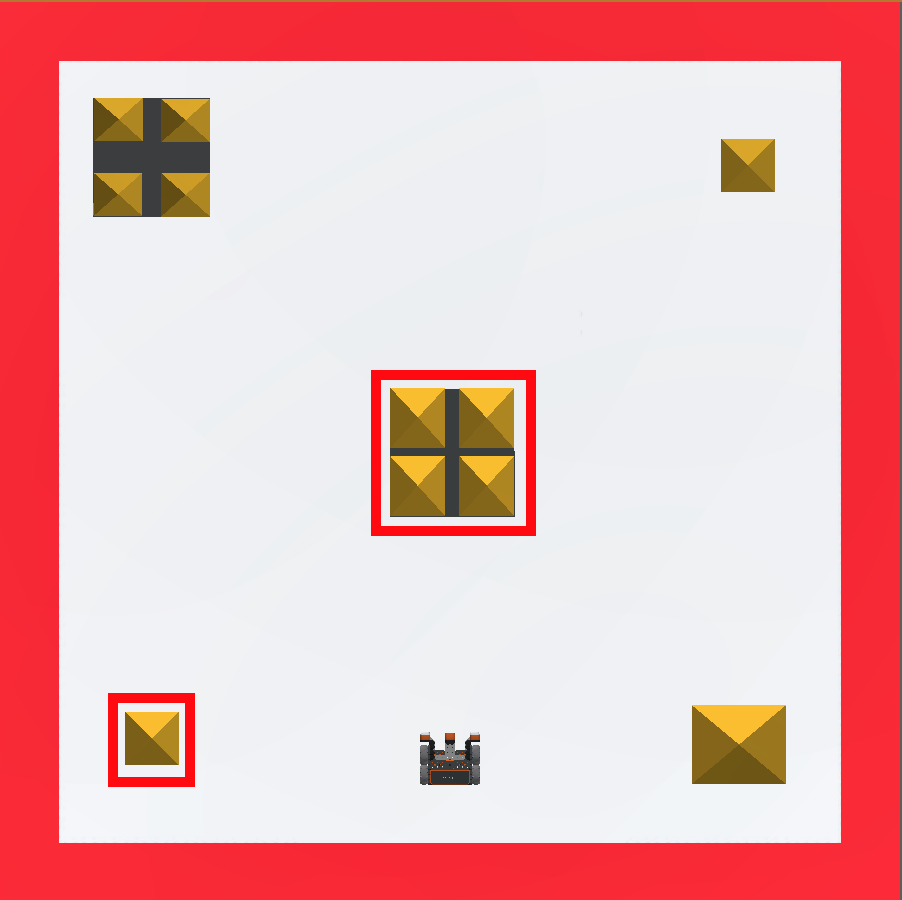
এই উদাহরণে VR রোবটটি কেন্দ্রের বিল্ডিং-এর উপর নক করতে হবে, তারপর Castle Crasher Playground-এ নীচের বাম কোণে বিল্ডিংটি ঘুরিয়ে নক করতে হবে।
-
প্রকল্প থেকে নীচের দুটি কমান্ড সরান। আপনার প্রকল্পটি এখন এইরকম দেখা উচিত:
# "main" তে প্রোজেক্ট কোড যোগ করুন def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) -
drive_forকমান্ডের পরে turn_to_headingকমান্ডটি টেনে আনুন অথবা টাইপ করুন। turn_to_headingকমান্ডের প্যারামিটারগুলি 270 ডিগ্রিতে সেট করুন। আপনার প্রকল্পটি এখন এইরকম দেখা উচিত:
# "main" তে প্রোজেক্ট কোড যোগ করুন def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) -
drive_for কমান্ডটি টেনে আনুন অথবা টাইপ করুন এবং এটি turn_to_headingকমান্ডের নীচে সংযুক্ত করুন। ৭০০ মিলিমিটার (মিমি) এগিয়ে নিয়ে যাওয়ার জন্য drive_forকমান্ডের প্যারামিটার সেট করুন। আপনার প্রকল্পটি এখন এইরকম দেখা উচিত:
# "main" তে প্রোজেক্ট কোড যোগ করুন def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - ক্যাসল ক্র্যাশার প্লেগ্রাউন্ড চালু করতে "ওপেন প্লেগ্রাউন্ড" বোতামটি নির্বাচন করুন যদি এটি ইতিমধ্যে খোলা না থাকে।

- প্রকল্পটি পরীক্ষা করতে "স্টার্ট" বোতামটি নির্বাচন করুন।

-
শুরুতে ফিরে যাওয়ার আগে VR রোবটটিকে সামনের দিকে এগিয়ে যেতে এবং কেন্দ্রের বিল্ডিংয়ের সাথে সংঘর্ষে দেখুন। VR রোবটটি তারপর 270 ডিগ্রির শিরোনামে ঘুরবে এবং ক্যাসেল ক্র্যাশার প্লেগ্রাউন্ডএর নীচে বাম কোণে বিল্ডিংয়ের সাথে সংঘর্ষের জন্য এগিয়ে যাবে।
মিনি চ্যালেঞ্জ
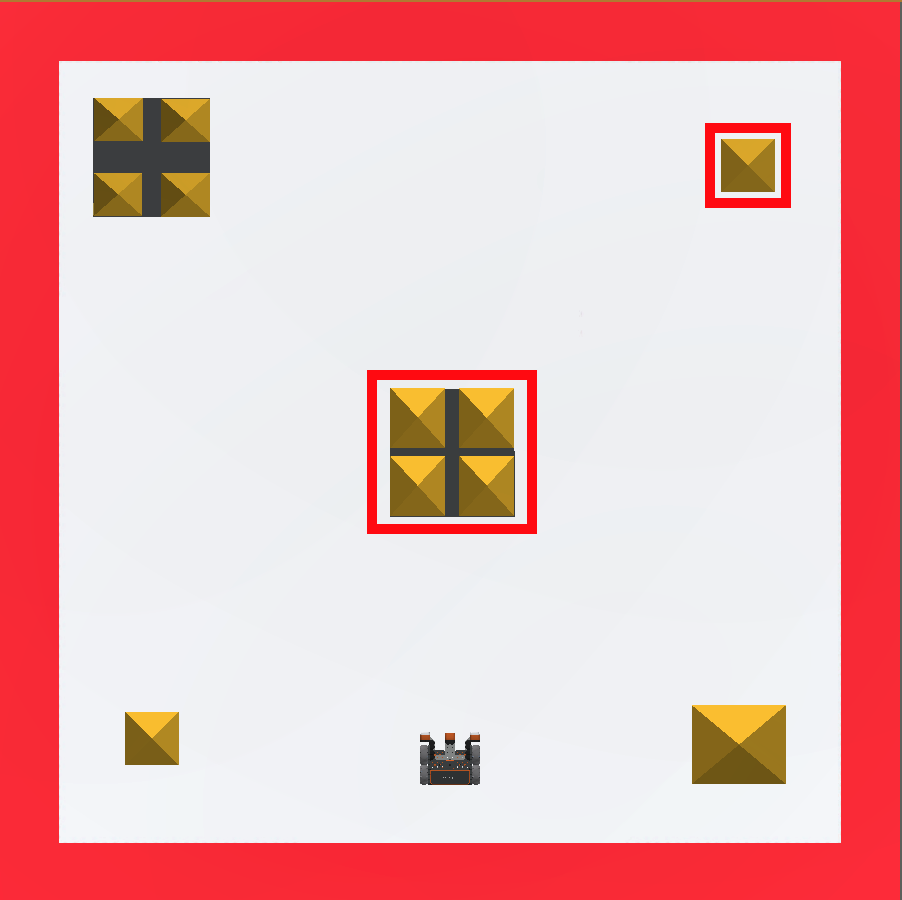
এই মিনি চ্যালেঞ্জের জন্য, VR রোবটটি ক্যাসেল ক্র্যাশার প্লেগ্রাউন্ডএর উপরের ডানদিকের মধ্যবর্তী বিল্ডিং এবং বিল্ডিংয়ের সাথে সংঘর্ষ করবে। আপনাকে একটি প্রকল্প দেওয়া হবে, কিন্তু একটি ত্রুটি আছে। মিনি চ্যালেঞ্জ সমাধান করার জন্য প্রকল্প সম্পাদনা করুন!
মিনি চ্যালেঞ্জ সম্পূর্ণ করতে এই পদক্ষেপগুলি অনুসরণ করুন:
-
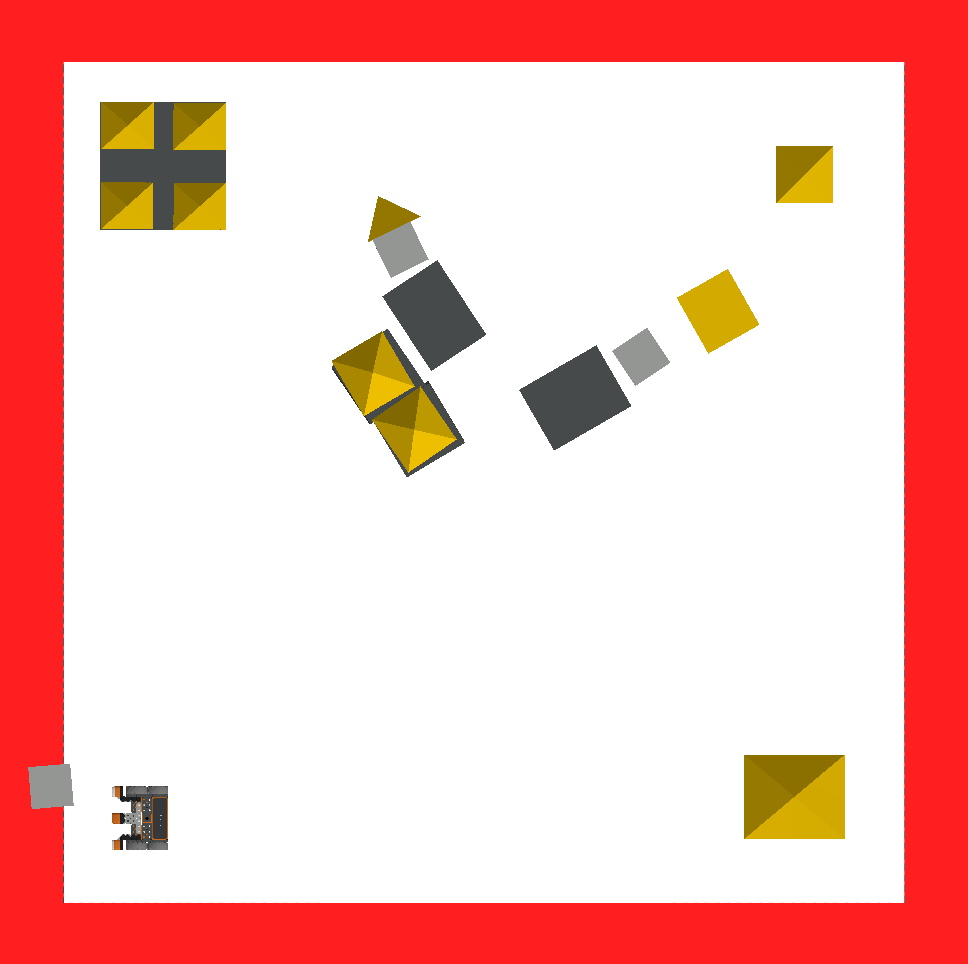
নীচের ভিডিও ক্লিপটিতে দেখানো হয়েছে যে কীভাবে VR রোবটটি উভয় ব্লককে ভেঙে ফেলার জন্য এগিয়ে যাবে। রোবটটিকে ব্লকের মাঝখানের সেটের মধ্য দিয়ে সোজা এগিয়ে যেতে হবে যাতে সেগুলি উল্টে যায়, তারপর ডানদিকে ঘুরতে হবে এবং উপরের ডানদিকের ব্লকের সেটে এগিয়ে যেতে হবে যাতে সেগুলিও ভেঙে পড়ে।
ভিডিও ফাইল -
Unit2Lesson3 প্রকল্পে প্রয়োজনীয় কমান্ড যোগ করে বা সরিয়ে দিয়ে এই প্রকল্পটি তৈরি করুন।
# "main" তে প্রোজেক্ট কোড যোগ করুন def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 1550, MM) drivetrain.turn_for(RIGHT, 180, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) - কোডে ত্রুটি কোথায় তা দেখতে প্রকল্পটি শুরু করুন।
- কোড সম্পাদনা করুন এবং আবার চেষ্টা করুন. মিনি চ্যালেঞ্জ সম্পূর্ণ না হওয়া পর্যন্ত এই প্রক্রিয়াটি চালিয়ে যান।
- একবার VR রোবট সফলভাবে মধ্যবর্তী বিল্ডিং এবং ক্যাসল ক্র্যাশার প্লেগ্রাউন্ডএর উপরের ডানদিকের বিল্ডিংয়ের সাথে ধাক্কা খেয়ে, প্রকল্পটি সংরক্ষণ করুন।
- এগিয়ে যাওয়ার আগে প্রকল্পটি সংরক্ষণ করুন।
অভিনন্দন! আপনি মিনি চ্যালেঞ্জ সমাধান করেছেন!