
पाठ 3: शीर्षक की ओर मुड़ें
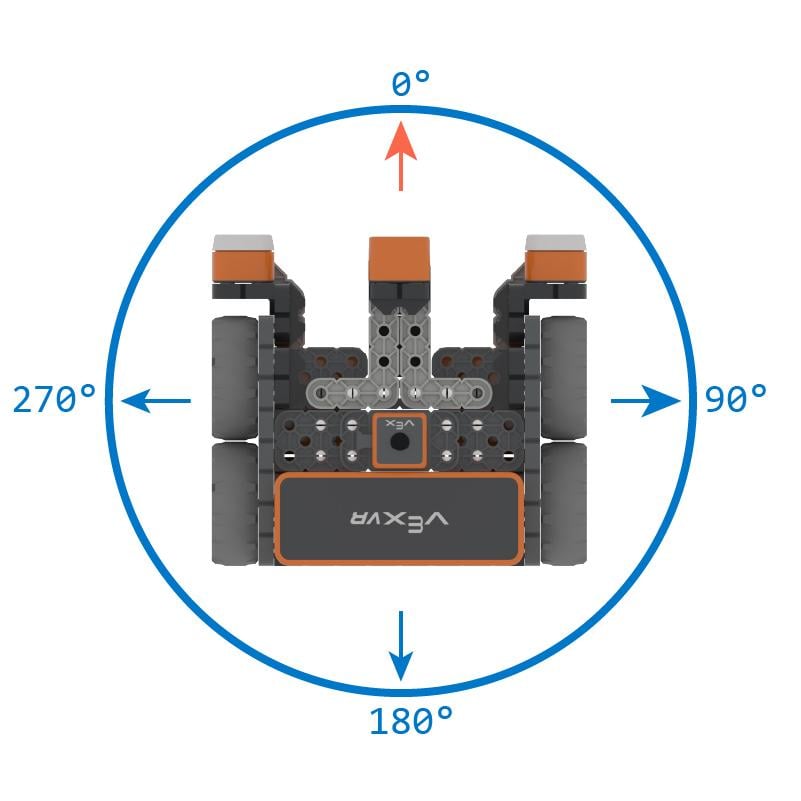
turn_to_headingकमांड का उपयोग VR रोबोट को घुमाने के लिए भी किया जा सकता है। यह कमांड वीआर रोबोट को 0 और 359.99 डिग्री के बीच एक निश्चित दक्षिणावर्त दिशा में घुमा देता है। जब कोई VR रोबोट किसी महल से टकराता है, तो वह अपने रास्ते से भटक सकता है। turn_to_headingकमांड यह सुनिश्चित करता है कि वीआर रोबोट अगले महल की ओर मुड़ जाएगा, चाहे पहले कुछ भी हुआ हो।
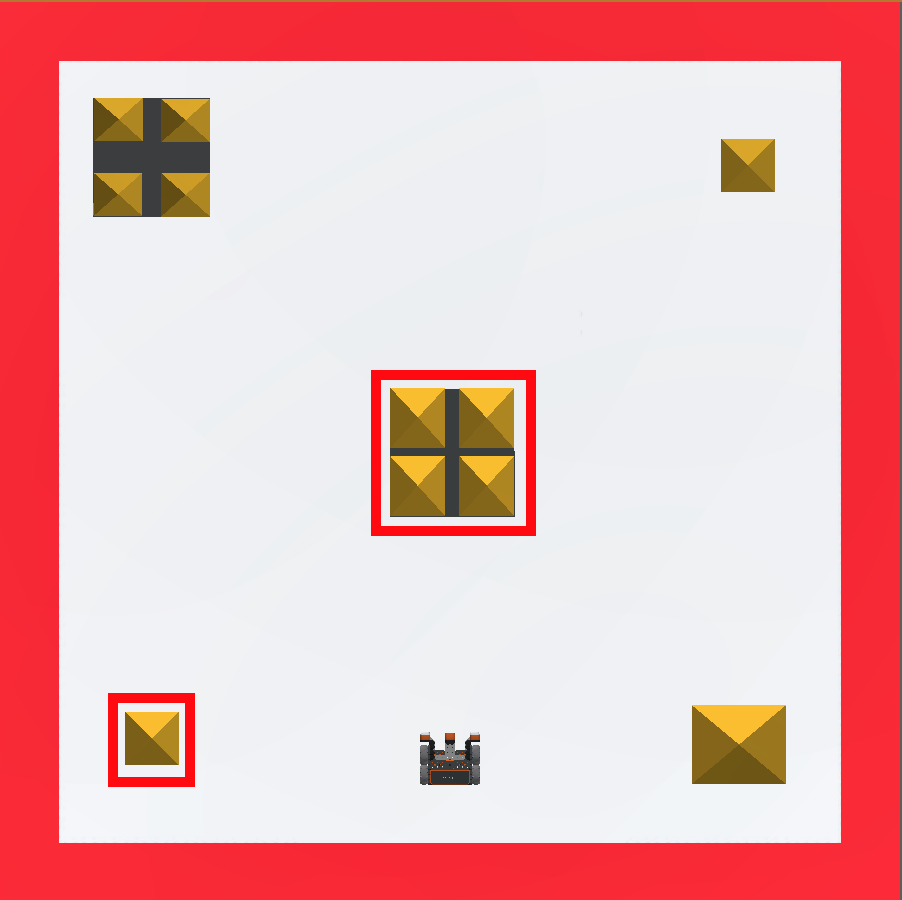
उदाहरण वीआर रोबोट केंद्र की इमारत को गिराने के लिए आगे बढ़ेगा, फिर मुड़कर नीचे कोने में स्थित इमारत को गिरा देगा
-
प्रोजेक्ट से नीचे के दो कमांड हटाएँ. अब आपका प्रोजेक्ट कुछ इस तरह दिखना चाहिए:
# "main" में प्रोजेक्ट कोड जोड़ें def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) -
drive_forकमांड के बाद turn_to_headingकमांड को खींचें या टाइप करें। turn_to_headingकमांड के पैरामीटर को 270 डिग्री पर सेट करें। अब आपका प्रोजेक्ट कुछ इस तरह दिखना चाहिए:
# "main" में प्रोजेक्ट कोड जोड़ें def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) -
drive_for कमांड को खींचें या टाइप करें और इसे turn_to_headingकमांड के नीचे संलग्न करें। 700 मिलीमीटर (मिमी) आगे ड्राइव करने के लिए drive_forकमांड के पैरामीटर सेट करें। अब आपका प्रोजेक्ट कुछ इस तरह दिखना चाहिए:
# "main" में प्रोजेक्ट कोड जोड़ें def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - कैसल क्रैशर प्लेग्राउंड को लॉन्च करने के लिए "ओपन प्लेग्राउंड" बटन का चयन करें यदि यह पहले से खुला नहीं है।

- प्रोजेक्ट का परीक्षण करने के लिए “प्रारंभ” बटन का चयन करें।

-
वीआर रोबोट को आगे बढ़ते हुए और वापस शुरूआती स्थान पर लौटने से पहले, केंद्र की इमारत से टकराते हुए देखें। वीआर रोबोट फिर 270 डिग्री की दिशा में मुड़ जाएगा और कैसल क्रैशर खेल के मैदानके निचले बाएं कोने में इमारत से टकराने के लिए आगे बढ़ेगा।
मिनी चैलेंज
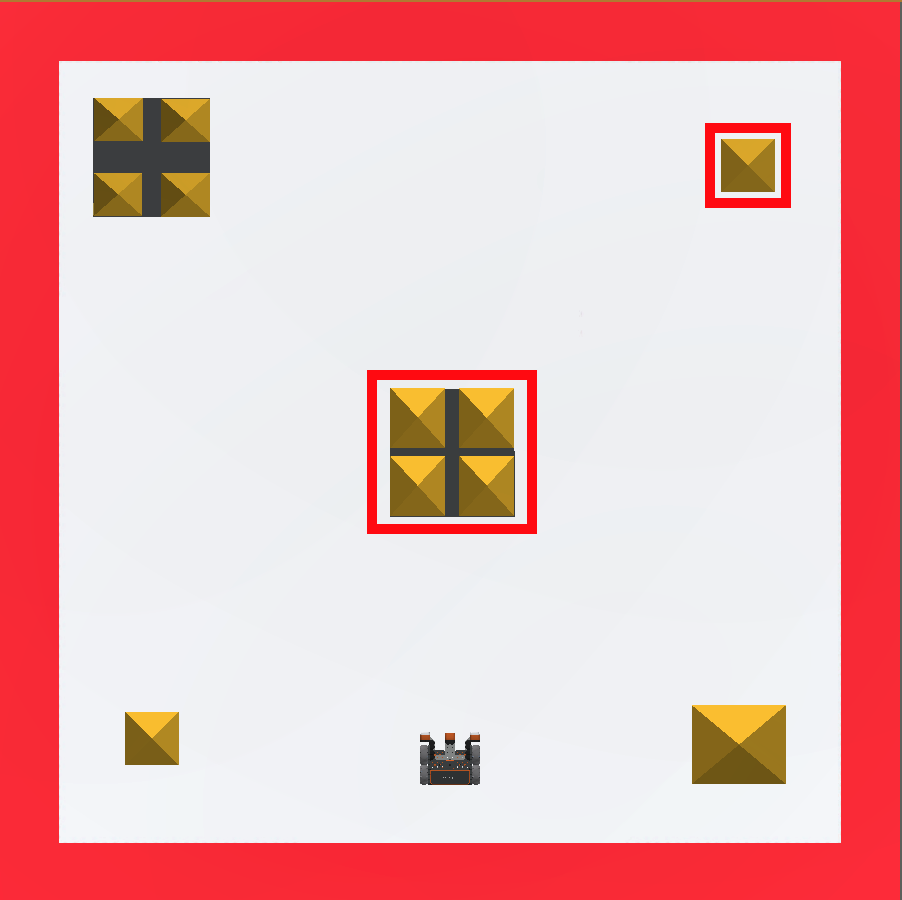
इस मिनी चुनौती के लिए, वीआर रोबोट को बीच की इमारत और कैसल क्रैशर खेल के मैदानके शीर्ष दाईं ओर की इमारत से टकराना चाहिए। आपको एक प्रोजेक्ट दिया जाएगा, लेकिन एक त्रुटि है। मिनी चुनौती को हल करने के लिए प्रोजेक्ट को संपादित करें!
मिनी चुनौती को पूरा करने के लिए इन चरणों का पालन करें:
-
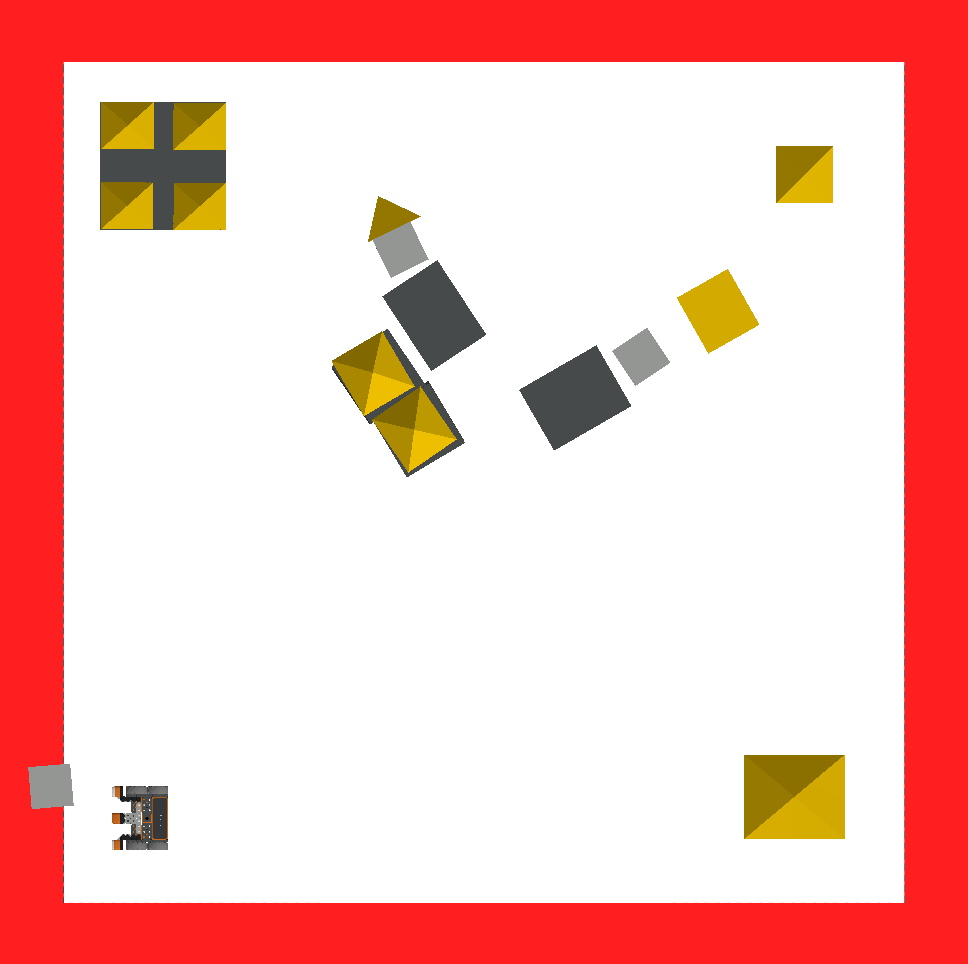
नीचे दी गई वीडियो क्लिप में दिखाया गया है कि वीआर रोबोट को दोनों ब्लॉकों को गिराने के लिए किस प्रकार आगे बढ़ना चाहिए। रोबोट को ब्लॉकों के मध्य समूह से सीधे आगे बढ़कर उन्हें गिराना चाहिए, फिर दाईं ओर मुड़कर ब्लॉकों के ऊपरी दाएं समूह में आगे बढ़कर उन्हें भी गिरा देना चाहिए।
वीडियो फाइल -
Unit2Lesson3 प्रोजेक्ट में आवश्यक कमांड जोड़कर या हटाकर यह प्रोजेक्ट बनाएं।
# "main" में प्रोजेक्ट कोड जोड़ें def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 1550, MM) drivetrain.turn_for(RIGHT, 180, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) - प्रोजेक्ट शुरू करके देखें कि कोड में त्रुटि कहां है।
- कोड संपादित करें और पुनः प्रयास करें. इस प्रक्रिया को तब तक जारी रखें जब तक मिनी चैलेंज पूरा न हो जाए।
- एक बार जब वीआर रोबोट सफलतापूर्वक मध्य भवन और कैसल क्रैशर प्लेग्राउंडके ऊपरी दाईं ओर की इमारत से टकरा जाता है, प्रोजेक्ट को सहेजें।
- आगे बढ़ने से पहले प्रोजेक्ट को सुरक्षित कर लें।
बधाई हो! आपने मिनी चुनौती हल कर ली!