
Lección 3: Pasar al encabezado
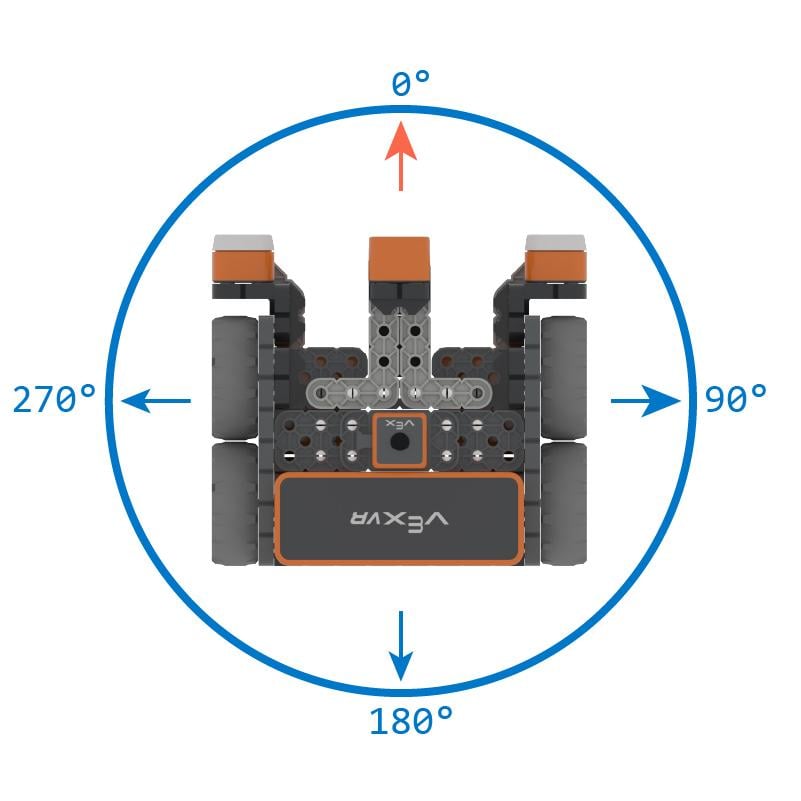
El comando turn_to_heading también se puede utilizar para girar el robot VR. Este comando gira el robot VR a un rumbo dado en el sentido de las agujas del reloj entre 0 y 359,99 grados. Cuando un robot de realidad virtual choca con un castillo, puede salirse de su curso. El comando turn_to_heading garantiza que el robot VR se girará para mirar hacia el próximo castillo sin importar lo que haya sucedido anteriormente.
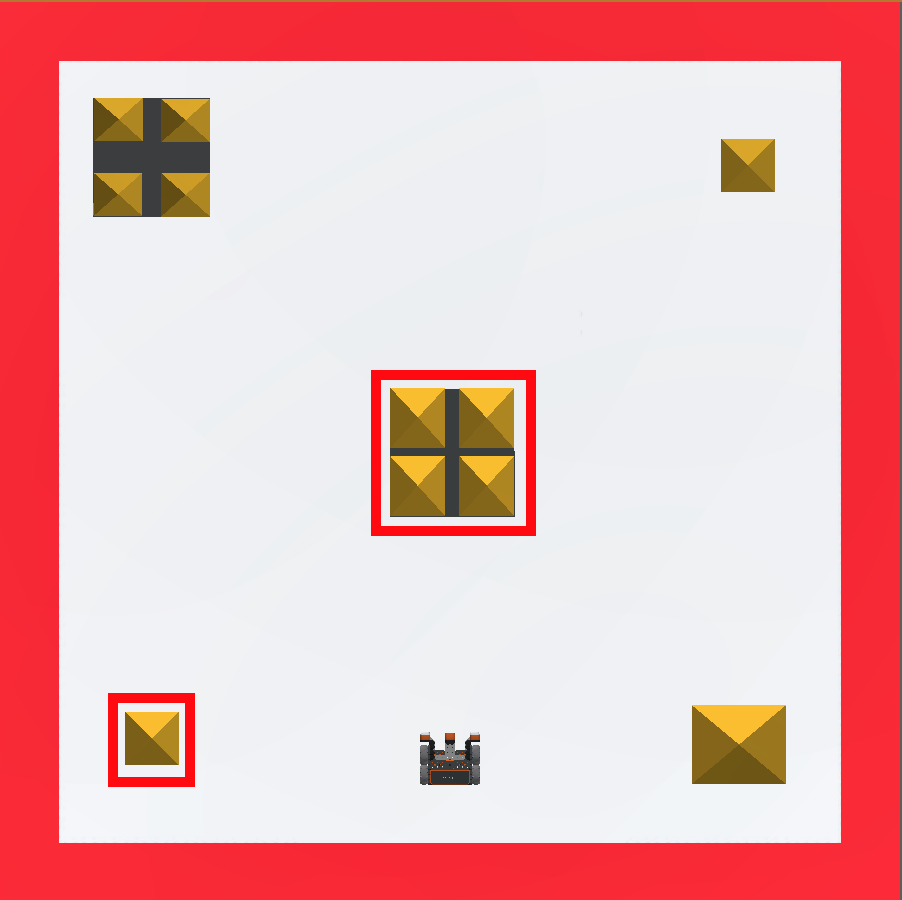
En este ejemplo, el robot VR se moverá para derribar el edificio central, luego girará y derribará el edificio en la esquina inferior izquierda en el Castle Crasher Playground.
-
Elimine los dos comandos inferiores del proyecto. Tu proyecto ahora debería verse así:
# Añadir código de proyecto en "main" def main() :drivetrain.set_drive_velocity (100, PERCENT ) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) -
Arrastre o escriba el comando turn_to_heading después del comando drive_ for. Establezca los parámetros del comando turn_to_heading 270 grados. Tu proyecto ahora debería verse así:
# Añadir código de proyecto en "main" def main() :drivetrain.set_drive_velocity (100, PERCENT )drivetrain.set_turn_velocity (100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) -
Arrastre o escriba el comando drive_for y adjúntelo debajo del comando turn_to_heading . Establezca los parámetros del comando drive_for para avanzar 700 milímetros (mm). Tu proyecto ahora debería verse así:
# Add project code in "main" def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - Selecciona el botón “Abrir patio de juegos” para iniciar el patio de juegos Castle Crasher si aún no está abierto.

- Seleccione el botón "Iniciar" para probar el proyecto.

-
Observa cómo el robot VR avanza y choca con el edificio central antes de volver al inicio. El robot VR girará a un rumbo de 270 grados y avanzará para chocar con el edificio en la esquina inferior izquierda del Castle Crasher Playground.
Mini desafío
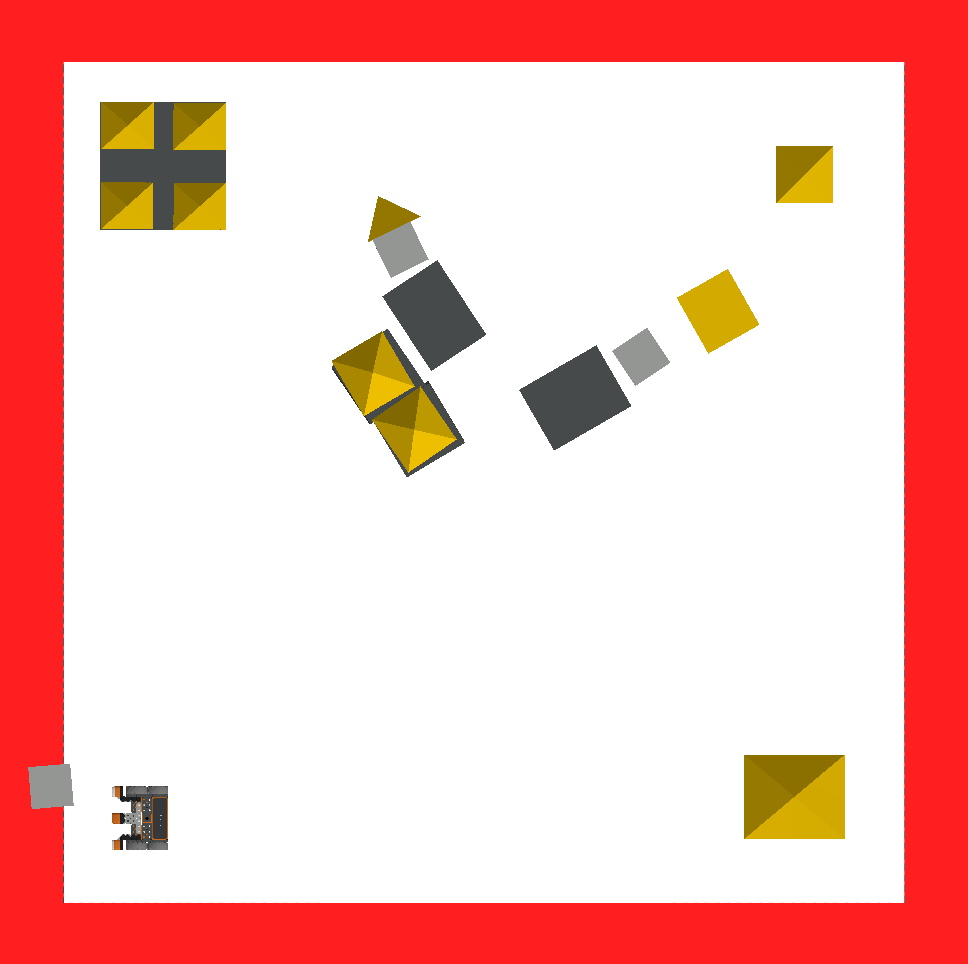
Para este mini desafío, el robot VR debe chocar con el edificio central y el edificio en la parte superior derecha del Castle Crasher Playground. Se le dará un proyecto, pero hay un error. ¡Edita el proyecto para resolver el mini desafío!
Sigue estos pasos para completar el mini desafío:
-
El siguiente video muestra cómo debe moverse el robot de realidad virtual para derribar ambos conjuntos de bloques. El robot debe conducir hacia adelante a través del conjunto medio de bloques para derribarlos, luego girar a la derecha y conducir hacia adelante en el conjunto superior derecho de bloques para derribarlos también.
Archivo de vídeo -
Cree este proyecto añadiendo o eliminando los comandos necesarios al proyecto Unit2Lesson3.
# Add project code in "main" def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 1550, MM) drivetrain.turn_for(RIGHT, 180, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) - Inicie el proyecto para ver dónde está el error en el código.
- Edita el código e inténtalo de nuevo. Continúa este proceso hasta que se complete el mini desafío.
- Una vez que el robot VR colisione con éxito con el edificio central y el edificio en la parte superior derecha del Castle Crasher Playground, guarde el proyecto.
- Guarde el proyecto antes de continuar.
¡Felicidades! ¡Has resuelto EL mini desafío!
Preguntas
Seleccione un enlace a continuación para acceder al cuestionario de la lección.
Google Doc / .docx / .pdf