
Pelajaran 3: Beralih ke Judul
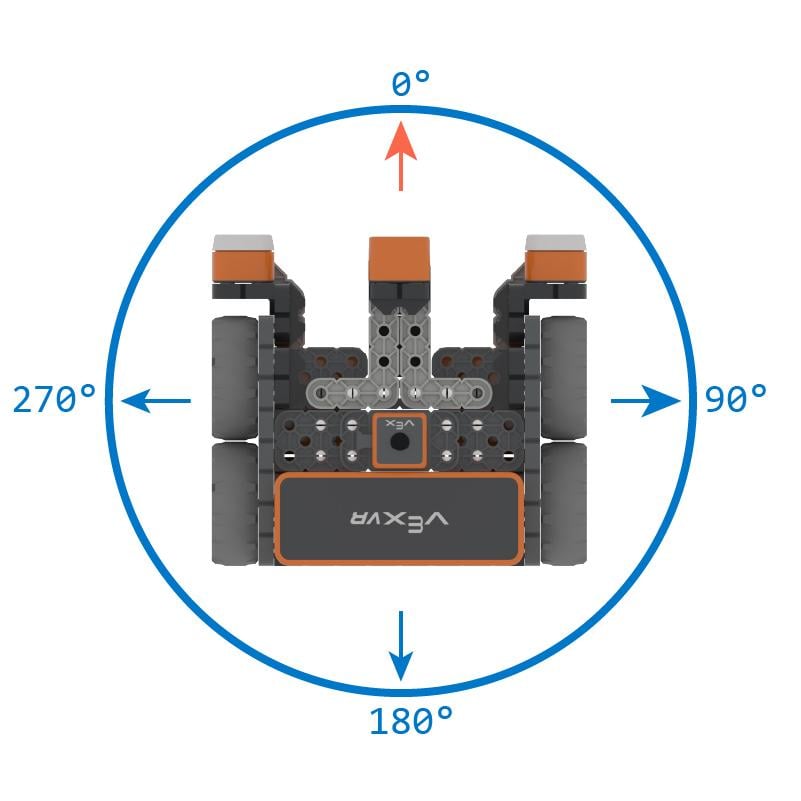
Perintah turn_to_headingjuga dapat digunakan untuk memutar Robot VR. Perintah ini memutar Robot VR ke arah searah jarum jam tertentu antara 0 dan 359,99 derajat. Jika Robot VR bertabrakan dengan kastil, ia mungkin akan terlempar dari jalurnya. Perintah turn_to_headingmemastikan Robot VR akan berbalik menghadap kastil berikutnya, apa pun yang terjadi sebelumnya.
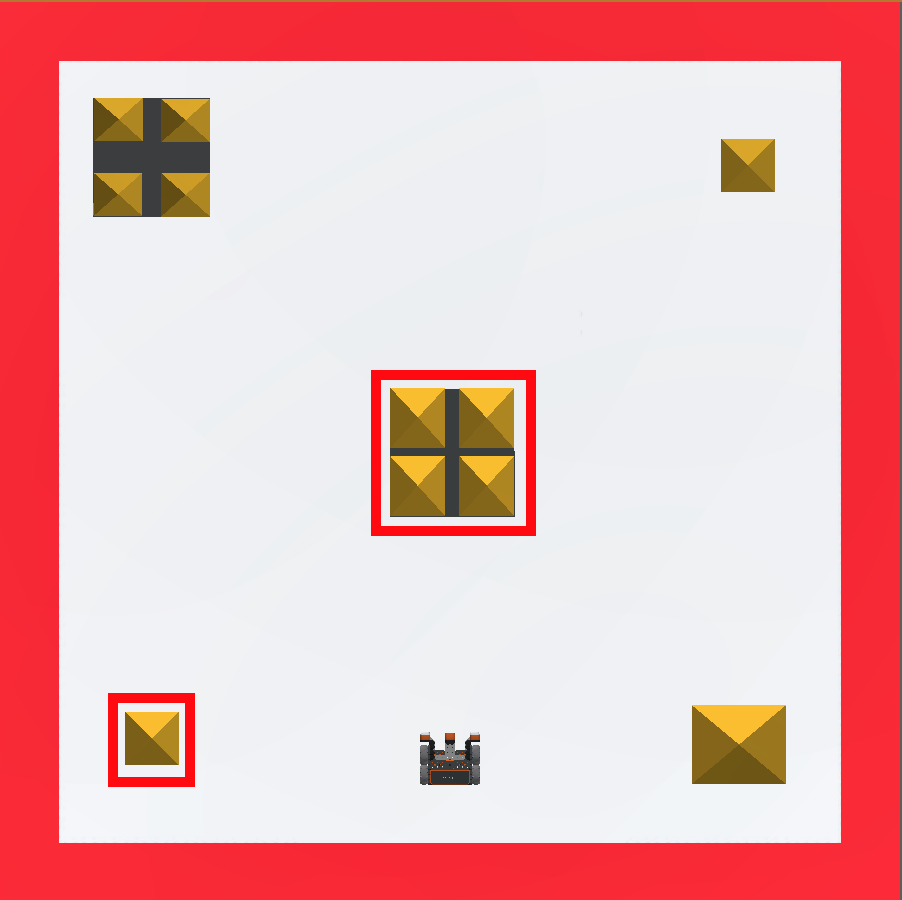
Contoh ini akan membuat Robot VR bergerak untuk merobohkan bangunan di tengah, lalu berbalik dan merobohkan bangunan di sudut kiri bawah pada Castle Crasher Playground.
-
Hapus dua perintah terbawah dari proyek. Proyek Anda sekarang akan terlihat seperti ini:
# Tambahkan kode proyek di "utama" def main(): drivetrain.set_drive_velocity(100, PERSEN) drivetrain.set_turn_velocity(100, PERSEN) drivetrain.drive_for(MAJU, 800, MM) drivetrain.drive_for(BALIK, 800, MM) -
Seret atau ketik perintah turn_to_headingsetelah perintah drive_for. Atur parameter perintah turn_to_headingke 270 derajat. Proyek Anda sekarang akan terlihat seperti ini:
# Tambahkan kode proyek di "utama" def main(): drivetrain.set_drive_velocity(100, PERSEN) drivetrain.set_turn_velocity(100, PERSEN) drivetrain.drive_for(MAJU, 800, MM) drivetrain.drive_for(BALIK, 800, MM) drivetrain.putar_ke_arah(270, DERAJAT) -
Seret atau ketik perintah drive_for dan lampirkan di bawah perintah turn_to_heading. Tetapkan parameter perintah drive_foruntuk bergerak maju sejauh 700 milimeter (mm). Proyek Anda sekarang akan terlihat seperti ini:
# Tambahkan kode proyek di "utama" def main(): drivetrain.set_drive_velocity(100, PERSEN) drivetrain.set_turn_velocity(100, PERSEN) drivetrain.drive_for(MAJU, 800, MM) drivetrain.drive_for(BALIK, 800, MM) drivetrain.turn_to_heading(270, DERAJAT) drivetrain.drive_for(MAJU, 700, MM) - Pilih tombol “Buka Playground” untuk meluncurkan Castle Crasher Playground jika belum terbuka.

- Pilih tombol “Mulai” untuk menguji proyek.

-
Saksikan Robot VR bergerak maju dan bertabrakan dengan bangunan di tengah sebelum berbalik kembali ke awal. Robot VR kemudian akan berputar ke arah 270 derajat dan melaju ke depan untuk bertabrakan dengan bangunan di sudut kiri bawah Castle Crasher Playground.
Tantangan Mini
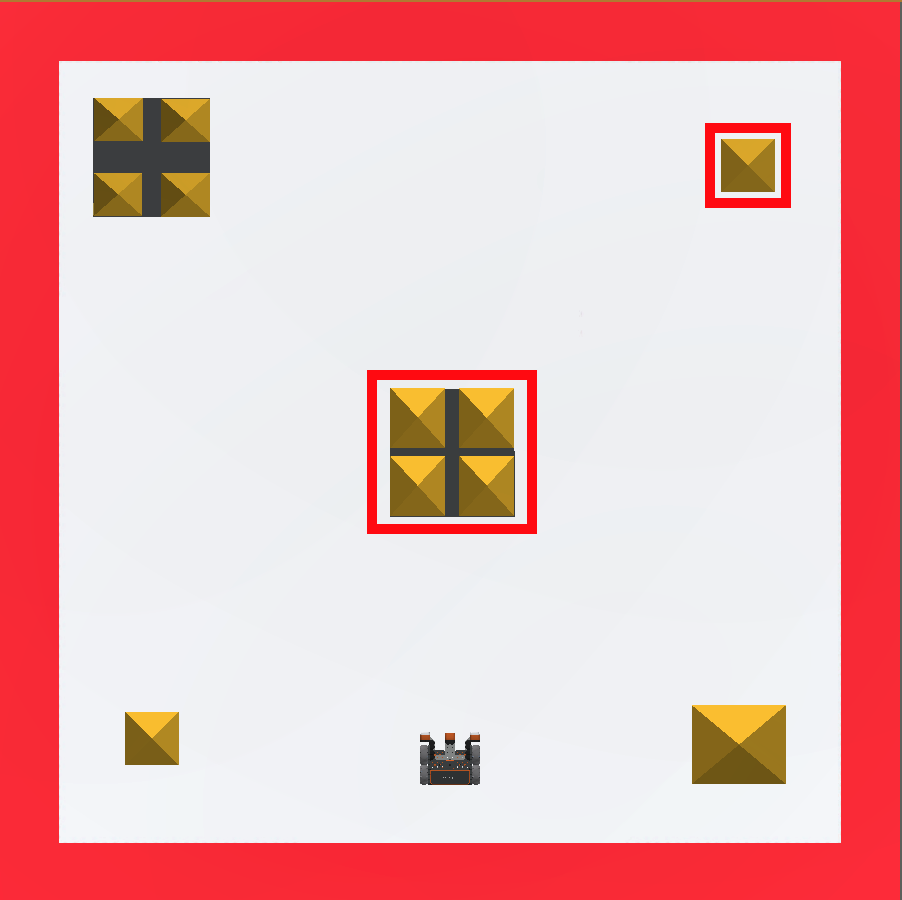
Untuk tantangan mini ini, Robot VR harus bertabrakan dengan bangunan tengah dan bangunan di kanan atas Castle Crasher Playground. Anda akan diberikan proyek, tetapi ada kesalahan. Edit proyek untuk menyelesaikan tantangan mini!
Ikuti langkah-langkah berikut untuk menyelesaikan tantangan mini:
-
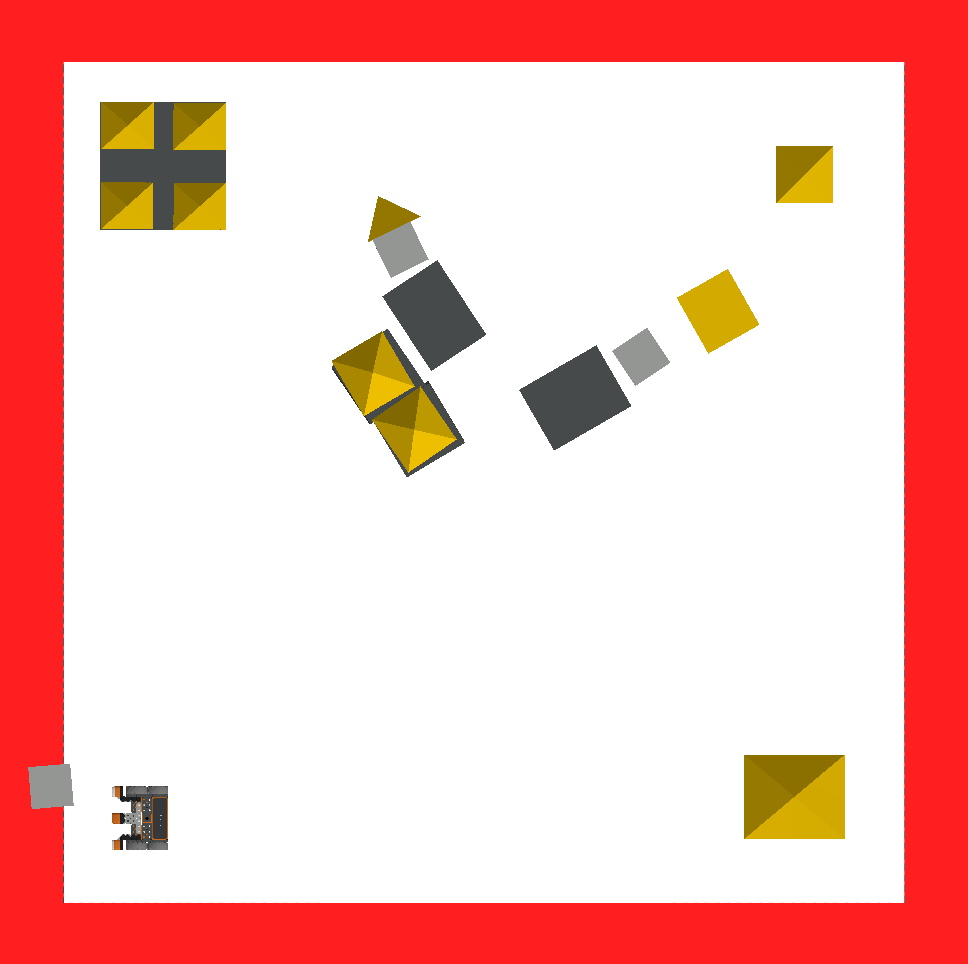
Klip video di bawah menunjukkan bagaimana Robot VR harus bergerak untuk menjatuhkan kedua set balok. Robot harus melaju lurus ke depan melewati set balok tengah untuk menjatuhkannya, lalu berbelok ke kanan dan melaju ke depan ke set balok kanan atas untuk menjatuhkannya juga.
Berkas video -
Buat proyek ini dengan menambahkan atau menghapus perintah yang diperlukan ke proyek Unit2Lesson3.
# Tambahkan kode proyek di "utama" def main(): drivetrain.set_drive_velocity(100, PERSEN) drivetrain.set_turn_velocity(100, PERSEN) drivetrain.drive_for(MAJU, 1550, MM) drivetrain.turn_for(KANAN, 180, DERAJAT) drivetrain.drive_for(MAJU, 700, MM) drivetrain.turn_for(KANAN, 90, DERAJAT) - Mulai proyek untuk melihat di mana letak kesalahan dalam kode.
- Edit kode dan coba lagi. Lanjutkan proses ini hingga tantangan mini selesai.
- Setelah Robot VR berhasil menabrak bangunan tengah dan bangunan di kanan atas Castle Crasher Playground, simpan proyek.
- Simpan proyek sebelum melanjutkan.
Selamat! Anda berhasil memecahkan tantangan mini!