
Lektion 3: Wenden Sie sich der Überschrift zu
Der Befehl turn_to_heading kann auch zum Drehen des VR-Roboters verwendet werden. Dieser Befehl dreht den VR-Roboter in eine bestimmte Richtung im Uhrzeigersinn zwischen 0 und 359,99 Grad. Wenn ein VR-Roboter mit einer Burg kollidiert, kann er vom Kurs abkommen. Der Befehl turn_to_heading stellt sicher, dass sich der VR-Roboter dem nächsten Schloss zuwendet, unabhängig davon, was zuvor passiert ist.

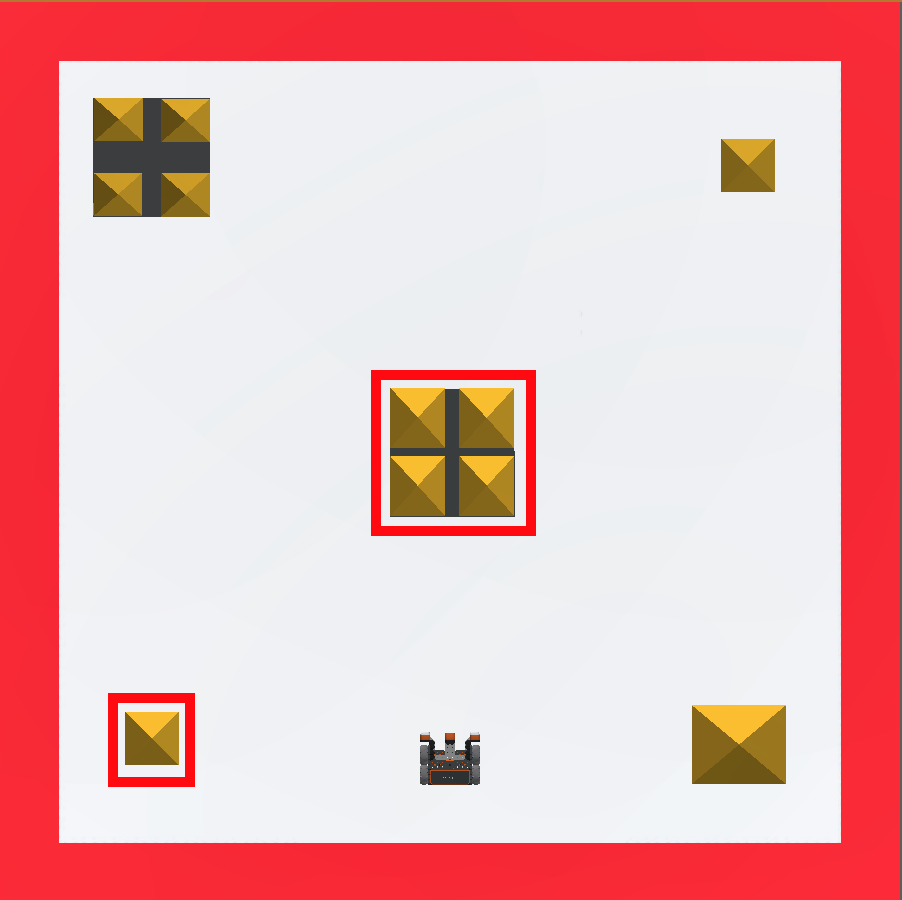
In diesem Beispiel wird der VR-Roboter das mittlere Gebäude umstoßen und dann das Gebäude in der linken unteren Ecke auf dem Castle Crasher Playground drehen und umstoßen.
-
Entfernen Sie die beiden unteren Befehle aus dem Projekt. Ihr Projekt sollte nun so aussehen:
# Add project code in "main" def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) -
Ziehen Sie den Befehl turn_to_heading nach dem Befehl drive_for ein oder geben Sie ihn ein. Stellen Sie die Parameter des Befehls turn_to_heading auf 270 Grad ein. Ihr Projekt sollte nun so aussehen:
# Add project code in "main" def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) -
Ziehen Sie den Befehl drive_for hinein oder geben Sie ihn ein, und hängen Sie ihn unter den Befehl turn_to_heading an. Stellen Sie die Parameter des Befehls drive_for so ein, dass 700 Millimeter (mm) vorwärtsgefahren werden. Ihr Projekt sollte nun so aussehen:
# Add project code in "main" def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) drivetrain.turn_to_heading(270, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) - Wählen Sie die Schaltfläche "Open Playground", um den Castle Crasher Playground zu starten , wenn er noch nicht geöffnet ist.

- Wählen Sie die Schaltfläche „Start“, um das Projekt zu testen.

-
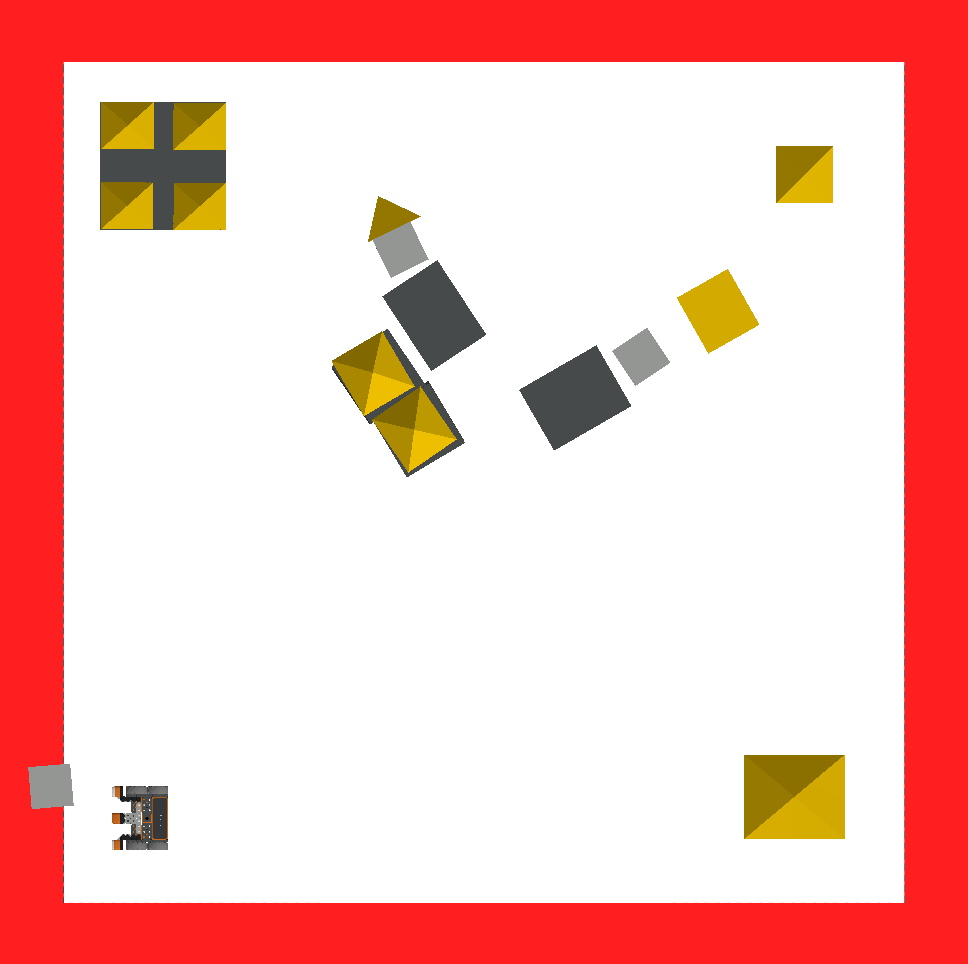
Beobachten Sie, wie sich der VR-Roboter vorwärts bewegt und mit dem mittleren Gebäude kollidiert, bevor Sie zum Start zurückkehren. Der VR-Roboter dreht sich dann in eine Richtung von 270 Grad und fährt vorwärts, um mit dem Gebäude in der linken unteren Ecke des Castle Crasher Playground zu kollidieren.
Mini-Herausforderung
Für diese Mini-Challenge sollte der VR-Roboter mit dem mittleren Gebäude und dem Gebäude oben rechts auf dem Castle Crasher Playground kollidieren. Sie erhalten ein Projekt, aber es liegt ein Fehler vor. Bearbeiten Sie das Projekt, um die Mini-Herausforderung zu lösen!

Befolgen Sie diese Schritte, um die Mini-Herausforderung abzuschließen:
-
Der folgende Videoclip zeigt, wie sich der VR-Roboter bewegen sollte, um beide Blöcke zu stürzen. Der Roboter sollte geradeaus durch den mittleren Satz von Blöcken fahren, um sie umzustoßen, dann nach rechts abbiegen und vorwärts in den oberen rechten Satz von Blöcken fahren, um sie ebenfalls zu stürzen.
Videodatei -
Erstellen Sie dieses Projekt, indem Sie die erforderlichen Befehle zum Unit2Lesson3-Projekt hinzufügen oder entfernen.
# Add project code in "main" def main(): drivetrain.set_drive_velocity(100, PERCENT) drivetrain.set_turn_velocity(100, PERCENT) drivetrain.drive_for(FORWARD, 1550, MM) drivetrain.turn_for(RIGHT, 180, DEGREES) drivetrain.drive_for(FORWARD, 700, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) - Starten Sie das Projekt, um zu sehen, wo sich der Fehler im Code befindet.
- Bearbeiten Sie den Code und versuchen Sie es erneut. Fahren Sie mit diesem Vorgang fort, bis die Mini-Herausforderung abgeschlossen ist.
- Sobald der VR-Roboter erfolgreich mit dem mittleren Gebäude und dem Gebäude oben rechts auf dem Castle Crasher Playground kollidiert, rette das Projekt.
- Speichern Sie das Projekt, bevor Sie fortfahren.
Herzlichen Glückwunsch! Du hast die Mini-Herausforderung gelöst!
Fragen
Bitte wählen Sie unten einen Link aus, um auf das Lektionsquiz zuzugreifen.
Google Doc / .docx / .pdf