
পাঠ ৩: [যদি তাহলে] ব্লক ব্যবহার করা
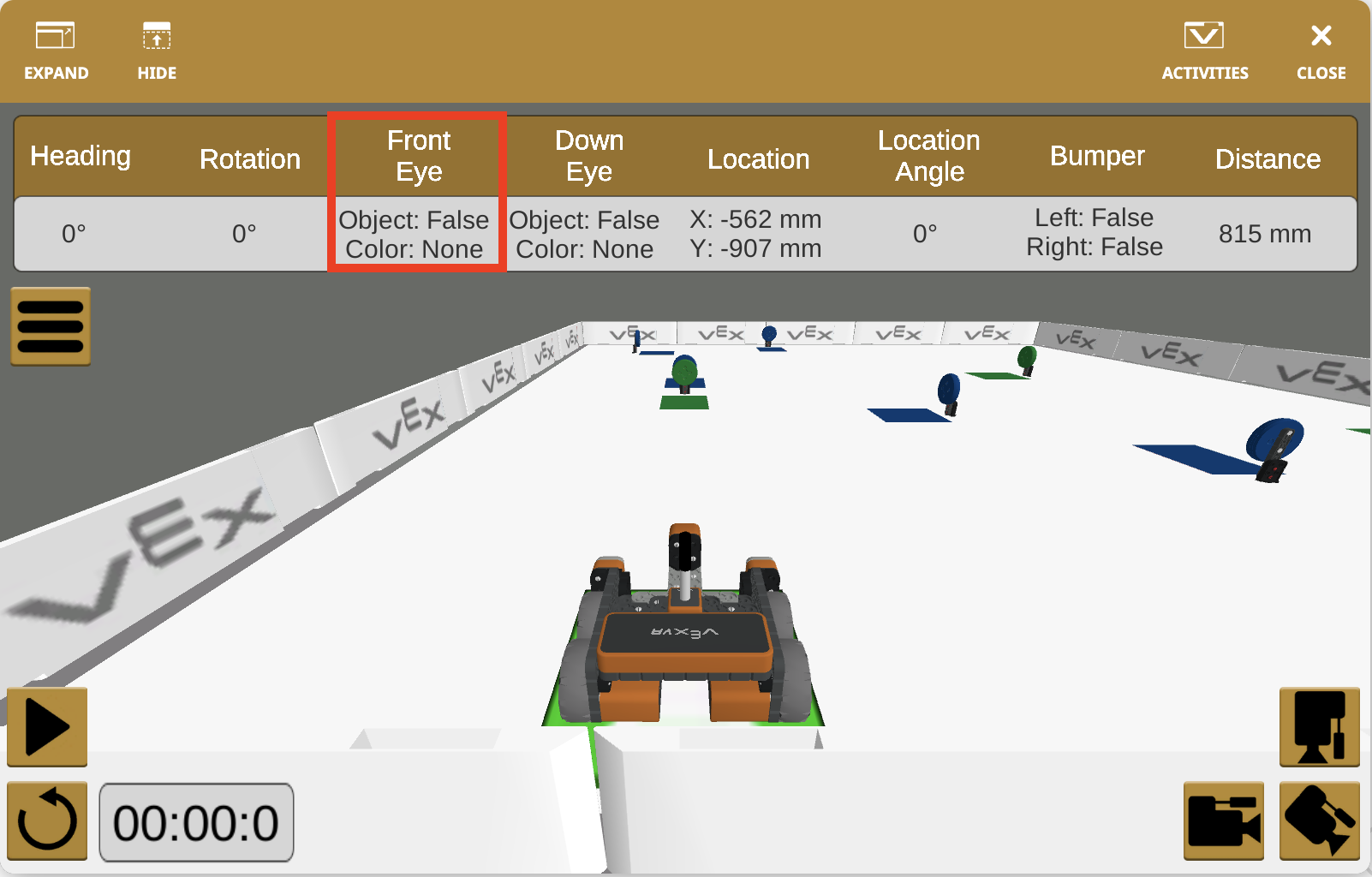
ডিস্ক মেজ চ্যালেঞ্জে, ভিআর রোবটটি ফ্রন্ট আই সেন্সরের অবস্থা পরীক্ষা করে দেখছে কোন রঙের রিপোর্ট করা হচ্ছে। প্রতিটি রঙ VR রোবটের করা উচিত এমন একটি ভিন্ন আচরণের সাথে মেলে।
-
একটি নতুন প্রকল্প শুরু করুন এবং এর নাম দিন Unit7Lesson3।

-
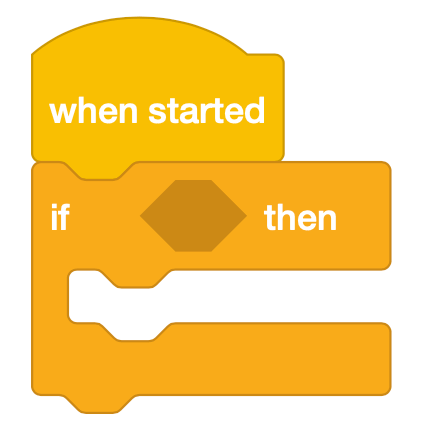
কর্মক্ষেত্রে একটি [যদি তারপর] ব্লক টেনে আনুন এবং এটি [যখন শুরু হয়েছে] ব্লকের সাথে সংযুক্ত করুন।
আপনার তথ্যের জন্য
[যদি তাহলে] ব্লক হল একটি সি ব্লক যা বুলিয়ান রিপোর্টার ব্লককে ইনপুট হিসেবে গ্রহণ করে। পাঠ 2-এ ডিস্ক গোলকধাঁধা সমাধান করার সময় পর্যবেক্ষণ করা নিদর্শনগুলি ব্যবহার করে, একটি প্রকল্প তৈরি করা যেতে পারে যেখানে VR রোবট একটি সিদ্ধান্ত নেয় যদি শর্তটি সত্য বা মিথ্যা হিসাবে রিপোর্ট করে।
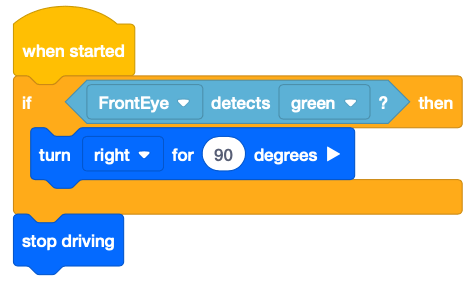
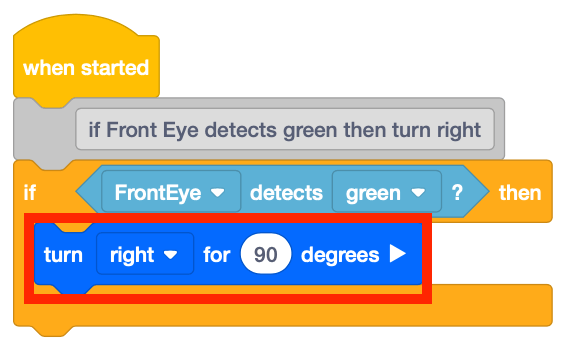
[যদি তাহলে] ব্লকটি একটি প্রকল্পে একবার চলবে। এই উদাহরণে, একটি সবুজ বস্তু শনাক্ত হলে ফ্রন্ট আই সেন্সর TRUE রিপোর্ট করবে এবং C ব্লকের ভিতরে কমান্ডটি চালাবে - 90 ডিগ্রির জন্য ডানদিকে ঘুরুন। যদি একটি সবুজ বস্তু সনাক্ত করা না হয়, প্রকল্পটি স্ট্যাকের পরবর্তী কমান্ডে চলে যাবে।
সুইচ ব্লক ব্যবহার করা
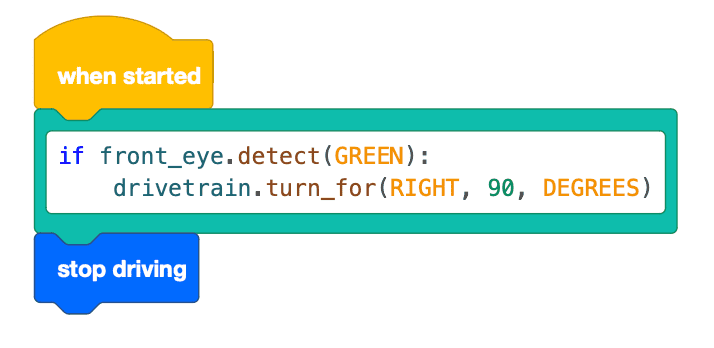
নিচের ছবিতে এই পাঠের উদাহরণ প্রকল্পের জন্য Switch [If then] ব্লক স্টেটমেন্ট দেখানো হয়েছে।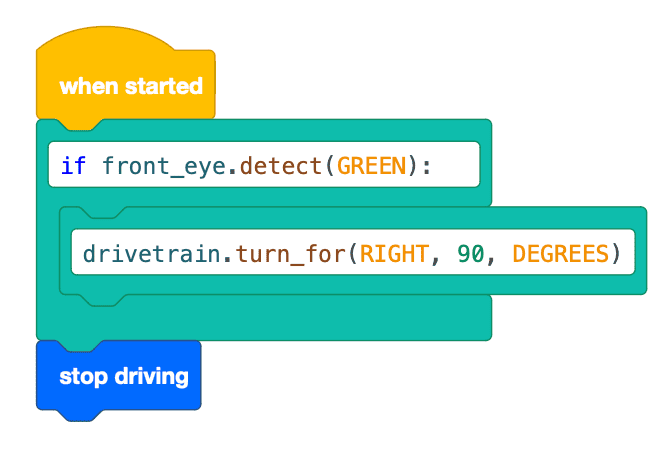
নিচের প্রকল্পটিতে একই কমান্ডগুলিকে একটি সুইচ ব্লকে রূপান্তরিত করা হয়েছে।
কোডের প্রথম লাইন, যদি front_eye.detect(GREEN): হল শর্তসাপেক্ষ লুপ যা পরীক্ষা করে যে ফ্রন্ট আই সেন্সর সবুজ রঙ সনাক্ত করে কিনা। মনে রাখবেন যে এই লাইনের শেষে একটি কোলন (:) থাকা উচিত।
কোডের দ্বিতীয় লাইন, drivetrain.turn_for(RIGHT, 90, DEGREES) রোবটটিকে 90 ডিগ্রি ডানদিকে ঘুরতে বলে যখন ফ্রন্ট আই সেন্সর সবুজ রঙ সনাক্ত করে। এই লাইন ডিফল্টভাবে ৪টি স্পেসএ ইন্ডেন্ট করা হয়েছে কারণ ফ্রন্ট আই সেন্সর সবুজ শনাক্ত করলে এটিই নির্দিষ্ট আচরণ করা হবে।
-
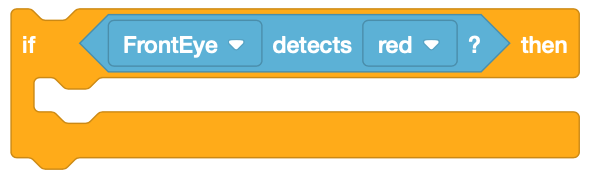
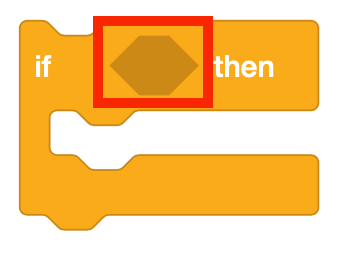
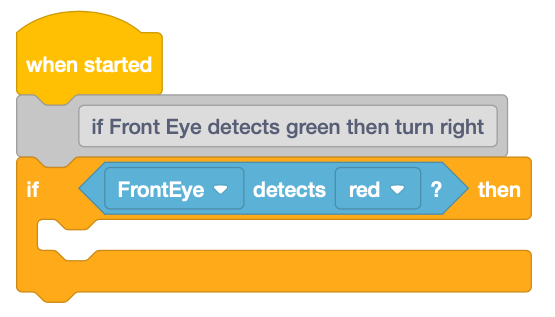
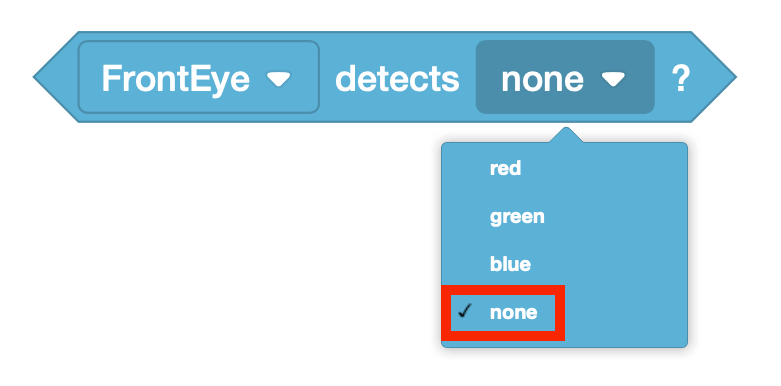
[যদি তাহলে] ব্লকের হেক্সাগোনাল ইনপুটে ওয়ার্কস্পেসে একটি <Color sensing> ব্লক টেনে আনুন।
-
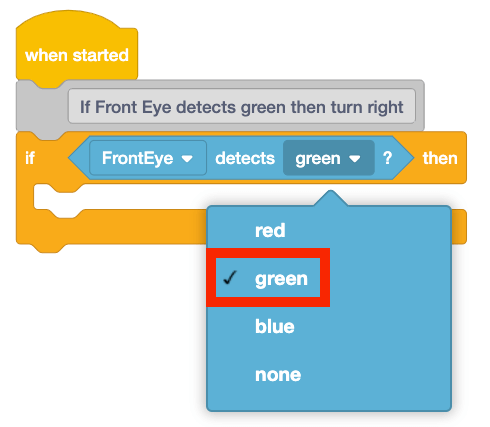
<Color sensing> ব্লকের প্যারামিটার পরিবর্তন করে 'সবুজ' করুন।
-
যখন ফ্রন্ট আই সেন্সর একটি সবুজ ডিস্ক সনাক্ত করে, তখন ডিস্ক গোলকধাঁধা সমাধান করা শুরু করতে VR রোবটকে ডানদিকে 90 ডিগ্রি ঘুরতে হবে। [যদি তাহলে] ব্লকে একটি [টার্ন ফর] ব্লক টেনে আনুন।
-
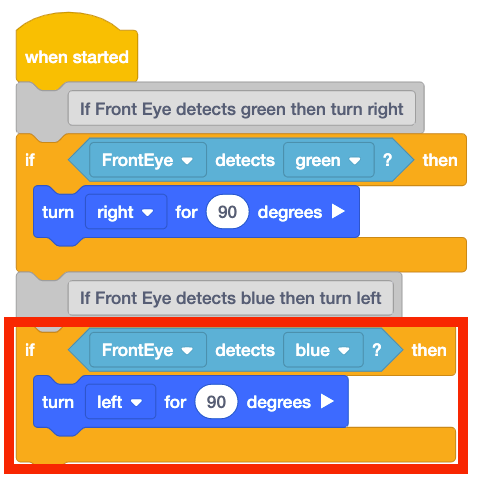
ডিস্ক গোলকধাঁধার (সবুজ, নীল এবং লাল) তিনটি রঙের জন্য আরেকটি [যদি তাহলে] ব্লক যোগ করতে এই একই পদক্ষেপগুলি অনুসরণ করুন। একেক রঙ একেক আচরণের সঙ্গে যুক্ত। [যদি তাহলে] ব্লকের ভিতরে থাকা ব্লকগুলিকে সেই উদ্দেশ্যমূলক আচরণের সাথে মেলে। প্রকল্পে নিম্নলিখিত ব্লক যোগ করুন. যখন VR রোবট 'নীল' রঙ শনাক্ত করবে, VR রোবটটি 90 ডিগ্রি বাম দিকে ঘুরবে।
-
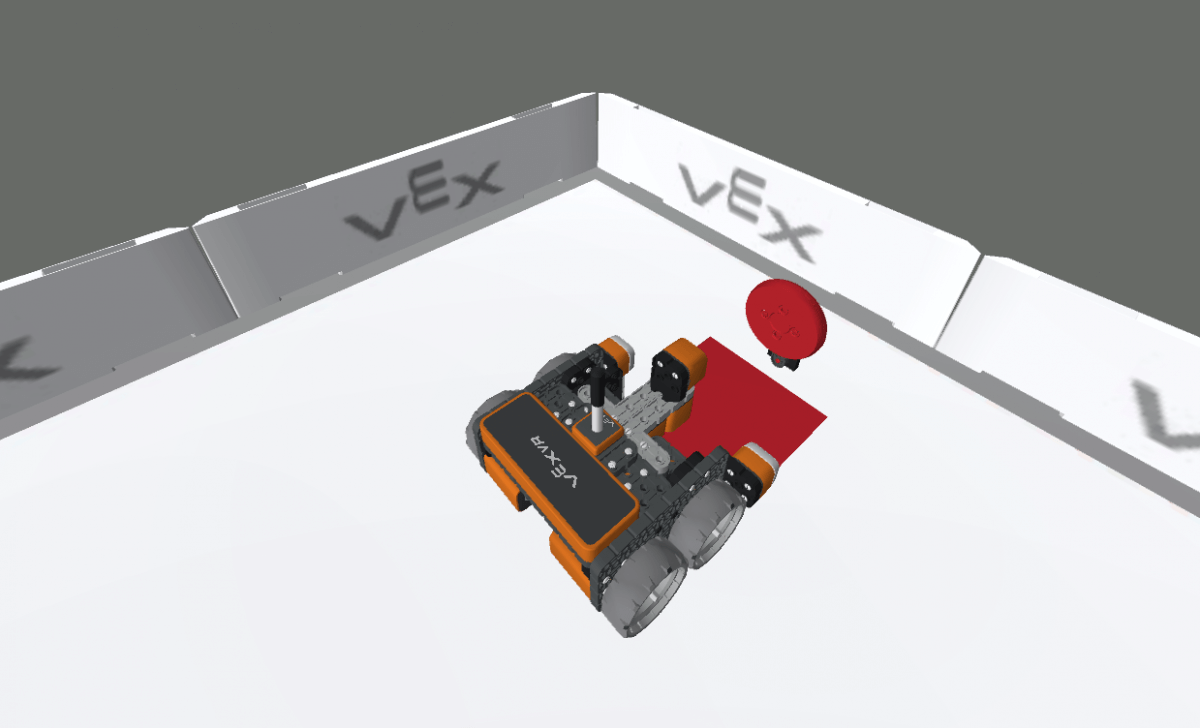
যখন VR রোবট গোলকধাঁধাটির শেষ প্রান্তে পৌঁছাবে, VR রোবট 'লাল' রঙ সনাক্ত করবে।
-
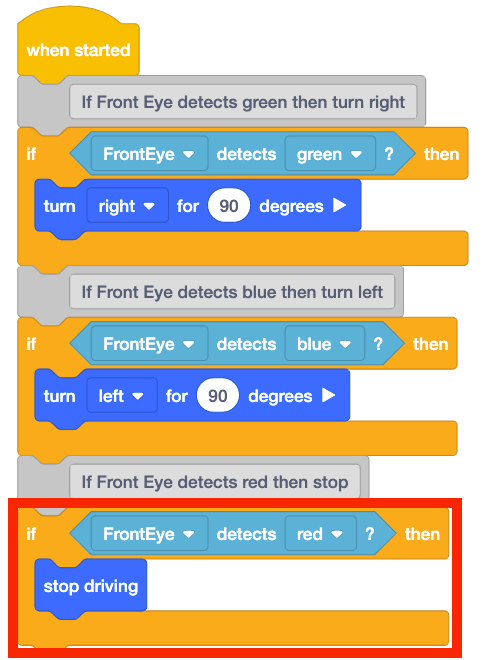
VR রোবট বন্ধ করতে, VR রোবট 'লাল' শনাক্ত করলে কী করতে হবে তার নির্দেশাবলী সহ আরেকটি [যদি তাহলে] ব্লক যোগ করতে হবে। প্রকল্পে নিম্নলিখিত ব্লক যোগ করুন.
-
VR রোবট 'কোনও' মান ব্যবহার করে কোনো রঙ না দেখলেও সিদ্ধান্ত নিতে পারে। ডিস্ক গোলকধাঁধার শুরুতে, ভিআর রোবট কোনো রঙ সনাক্ত করে না।
-
যেহেতু ফ্রন্ট আই সেন্সর ডিস্ক মেজের শুরুতে একটি রঙ সনাক্ত করে না, তাই ভিআর রোবটটিকে সবুজ ডিস্ক সনাক্ত না করা পর্যন্ত এগিয়ে যেতে হবে। কোন রঙ শনাক্ত না হলে VR রোবটকে কী করতে হবে তা নির্দেশ দেওয়ার জন্য আরেকটি [যদি তাহলে] ব্লক যোগ করা যেতে পারে।
-
প্রকল্পে নিম্নলিখিত ব্লক যোগ করুন. যখন VR রোবট কোনো রঙ শনাক্ত করে না, VR রোবট এগিয়ে যাবে।
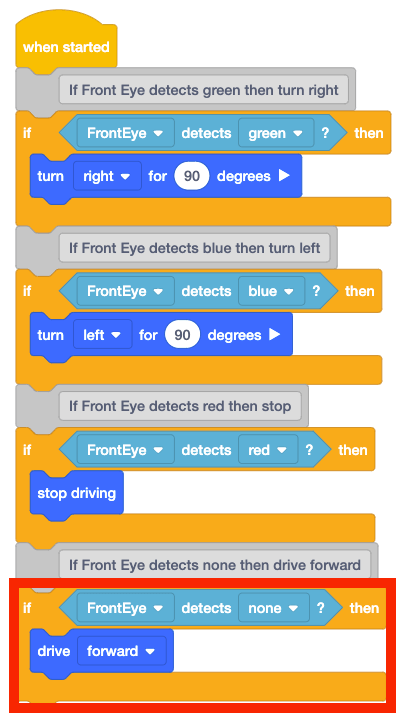
- VR রোবটে এখন আই সেন্সর দ্বারা সনাক্ত করা প্রতিটি রঙের জন্য নির্দেশাবলী রয়েছে।
- ফ্রন্ট আই সেন্সর 'সবুজ?'
- ডানদিকে 90 ডিগ্রি ঘুরুন
- ফ্রন্ট আই সেন্সর 'নীল?'
- বাম দিকে 90 ডিগ্রি ঘুরুন
- ফ্রন্ট আই সেন্সর 'লাল?'
- গাড়ি চালানো বন্ধ করুন
- ফ্রন্ট আই সেন্সর সনাক্ত করে 'কোনটি নয়?'
- এগিয়ে যান
- ফ্রন্ট আই সেন্সর 'সবুজ?'
- ডিস্ক মেজ প্লেগ্রাউন্ড খুলুন এবং প্রকল্পটি চালান।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।