
Lektion 3: Verwenden von [Wenn dann] -Blöcken
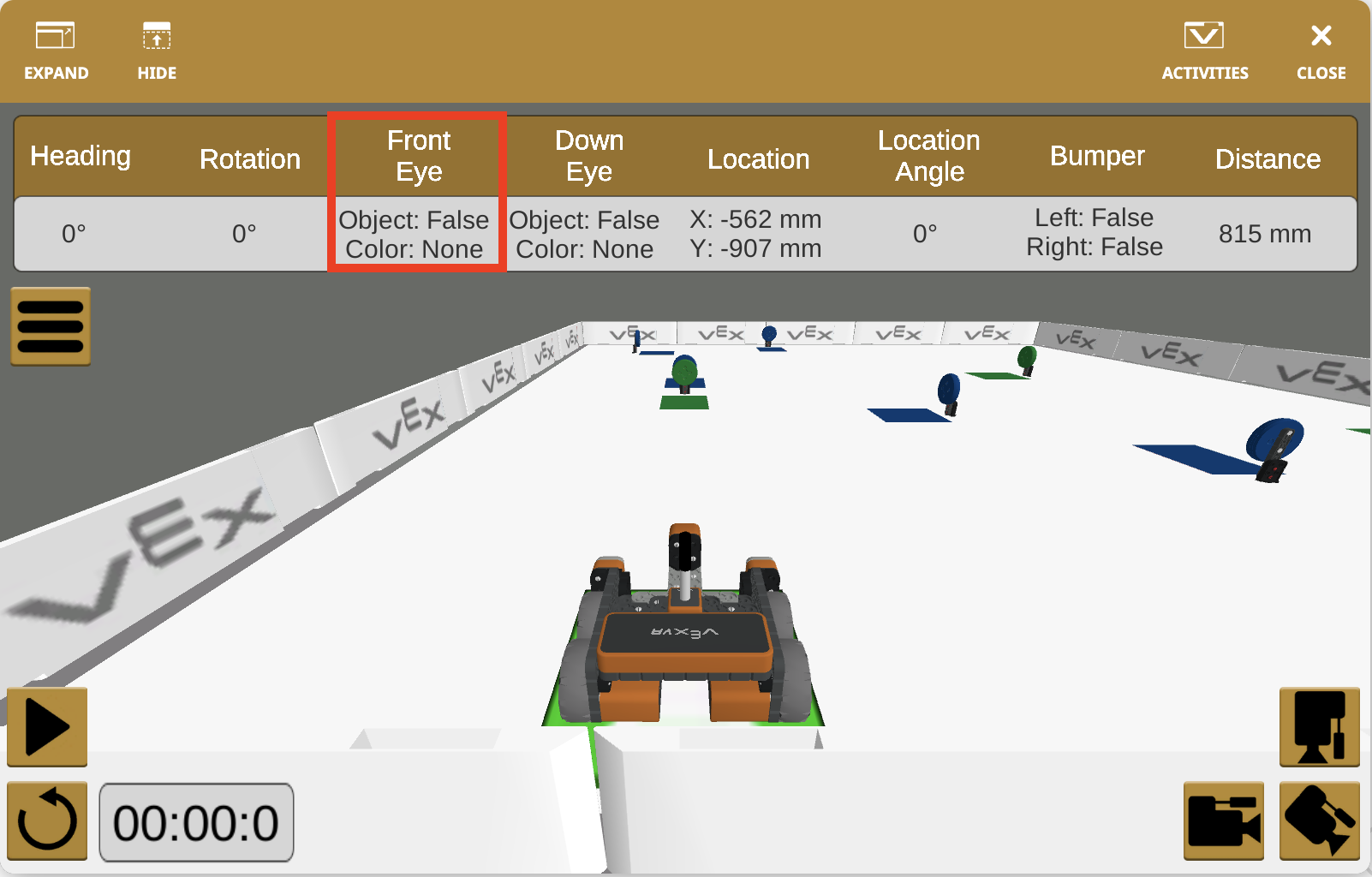
In der Disk Maze Challenge überprüft der VR-Roboter den Zustand des Front Eye Sensors, um zu sehen, welche Farbe gemeldet wird. Jede der Farben entspricht einem anderen Verhalten, das der VR-Roboter ausführen sollte.
-
Starten Sie ein neues Projekt und nennen Sie es Unit7Lesson3.

-
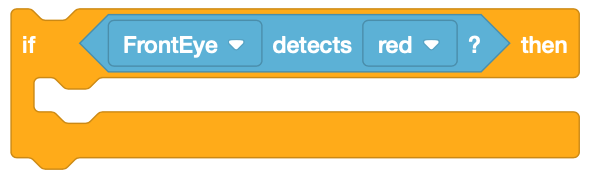
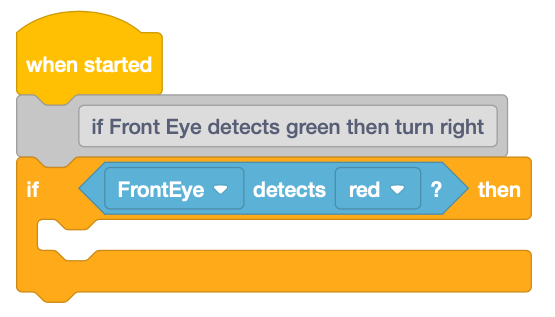
Ziehen Sie einen [If then] -Block in den Arbeitsbereich und hängen Sie ihn an den [When started] -Block an.

Zur Kenntnisnahme
Der [If then] -Block ist ein C-Block, der Boolesche Reporter-Blöcke als Eingabe akzeptiert. Unter Verwendung der Muster, die beim Lösen des Disk Labyrinths in Lektion 2 beobachtet wurden, kann ein Projekt erstellt werden, bei dem der VR-Roboter eine Entscheidung trifft, ob die Bedingung als WAHR oder FALSCH gemeldet wird.

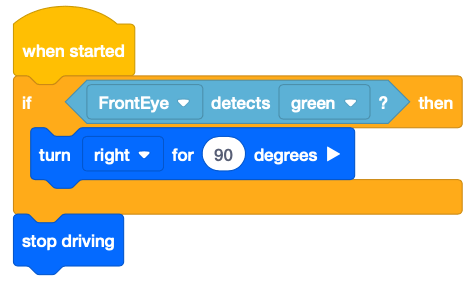
Der Block [Wenn dann] wird einmal in einem Projekt ausgeführt. In diesem Beispiel meldet der Front Eye Sensor TRUE, wenn ein grünes Objekt erkannt wird, und führt den Befehl innerhalb des C-Blocks aus - biegen Sie um 90 Grad nach rechts ab. Wenn kein grünes Objekt erkannt wird, wechselt das Projekt zum nächsten Befehl im Stapel.
Verwenden von Schalterblöcken
Die folgende Abbildung zeigt die Blockanweisung Switch [If then] für das Beispielprojekt dieser Lektion.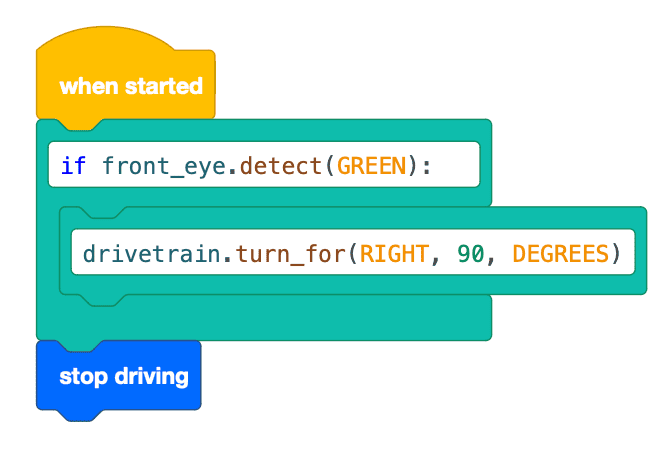
Das folgende Projekt enthält die gleichen Befehle, die in einen Switch-Block umgewandelt wurden.
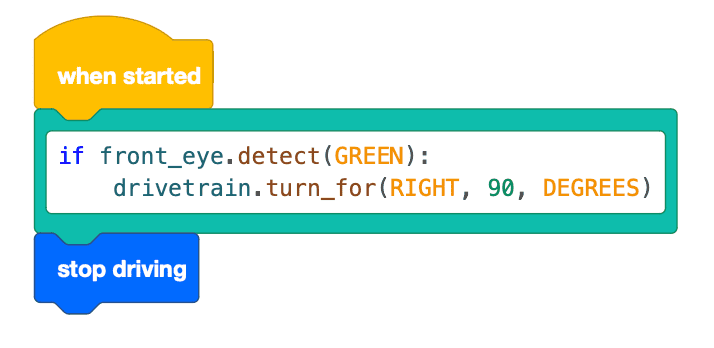
Die erste Codezeile, wenn front_eye.detect (GRÜN): ist die bedingte Schleife, die überprüft, ob der Front Eye Sensor die Farbe grün erkennt. Beachten Sie, dass am Ende dieser Zeile ein Doppelpunkt (:) stehen sollte.
Die zweite Codezeile, drivetrain.turn_for (RECHTS , 90, GRAD) weist den Roboter an, sich um 90 Grad nach rechts zu drehen, wenn der Front Eye Sensor die Farbe Grün erkennt. Diese Linie wird bei einer Standardeinstellung von 4 Leerzeichen eingerückt , da dies das spezifische Verhalten ist, das durchgeführt wird, wenn der Front Eye Sensor grün erkennt.
-
Ziehen Sie einen <Color sensing> Block in den Arbeitsbereich in den hexagonalen Eingang des Blocks [Wenn dann].
-
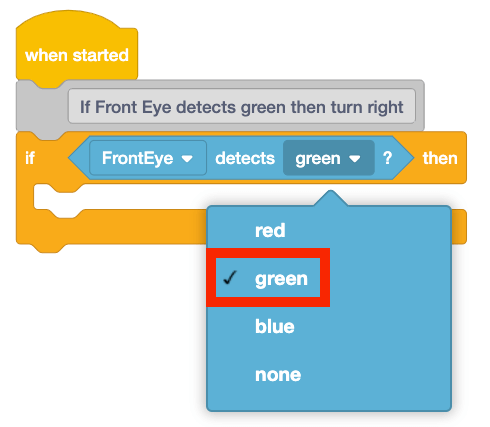
Ändern Sie den Parameter des <Color sensing> Blocks auf "Grün".
-
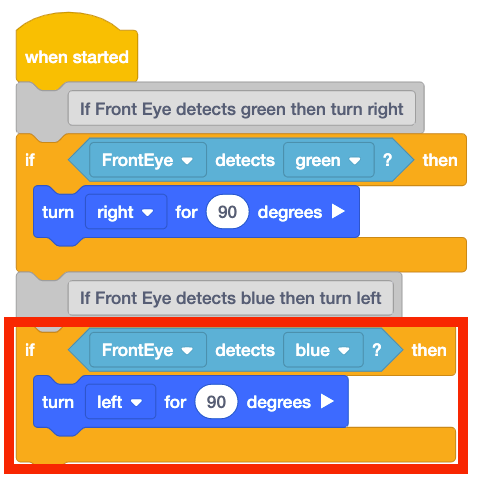
Wenn der Front Eye Sensor eine grüne Scheibe erkennt, muss sich der VR-Roboter um 90 Grad nach rechts drehen, um mit der Lösung des Scheibenlabyrinths zu beginnen. Ziehen Sie einen [Turn for] -Block in den [If then] -Block.

-
Führen Sie die gleichen Schritte aus, um einen weiteren [Wenn dann] -Block für alle drei Farben im Disk Labyrinth (grün, blau und rot) hinzuzufügen. Jede Farbe ist mit einem anderen Verhalten verbunden. Die Blöcke innerhalb des [If then] -Blocks müssen diesem beabsichtigten Verhalten entsprechen. Fügen Sie dem Projekt die folgenden Blöcke hinzu. Wenn der VR-Roboter die Farbe "Blau" erkennt, dreht sich der VR-Roboter um 90 Grad nach links.
-
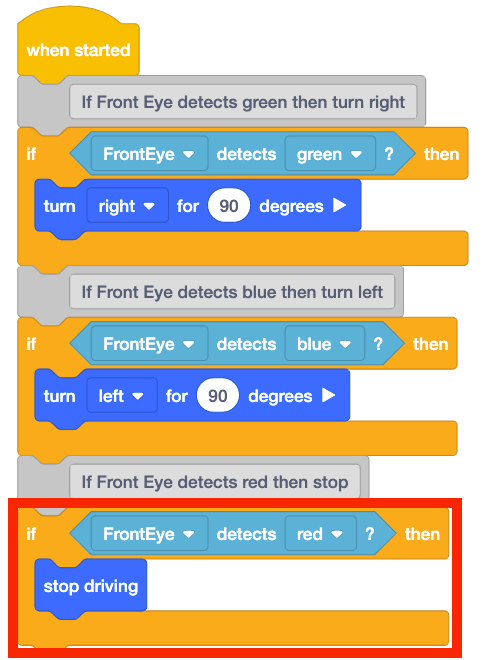
Wenn der VR-Roboter das Ende des Labyrinths erreicht, erkennt der VR-Roboter die Farbe "Rot".

-
Um den VR-Roboter zu stoppen, muss ein weiterer [Wenn dann] -Block mit Anweisungen hinzugefügt werden, was zu tun ist, wenn der VR-Roboter "rot" erkennt. Fügen Sie dem Projekt die folgenden Blöcke hinzu.
-
Der VR-Roboter kann auch eine Entscheidung treffen, wenn er keine Farbe sieht, indem er den Wert "keine" verwendet. Am Startpunkt des Disk Maze erkennt der VR-Roboter keine Farben.
-
Da der Front Eye Sensor zu Beginn des Disk Labyrinths keine Farbe erkennt, muss der VR-Roboter vorwärts fahren, bis er die grüne Platte erkennt. Ein weiterer [If then] -Block kann hinzugefügt werden, um den VR-Roboter anzuweisen, was zu tun ist, wenn keine Farbe erkannt wird.

-
Fügen Sie dem Projekt die folgenden Blöcke hinzu. Wenn der VR-Roboter keine Farbe erkennt, fährt der VR-Roboter vorwärts.
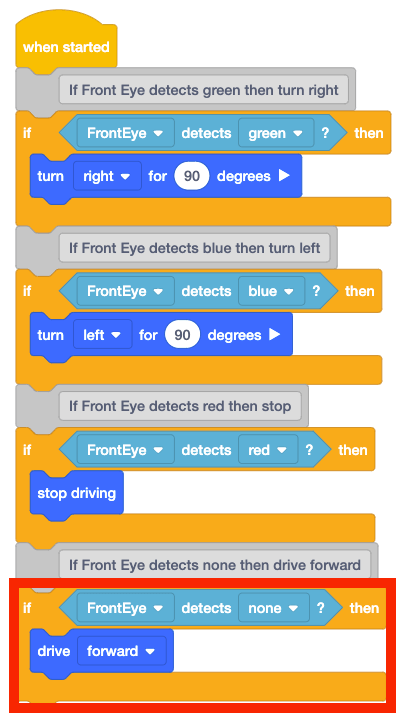
- Der VR-Roboter verfügt nun über Anweisungen für jede Farbe, die vom Augensensor erkannt wird.
- Vorderaugensensor erkennt "grün?"
- Um 90 Grad nach rechts drehen
- Vorderer Augensensor erkennt "blau?"
- Um 90 Grad nach links drehen
- Vorderaugensensor erkennt "rot?"
- Hör auf zu fahren
- Vorderaugensensor erkennt "keine?"
- Vorwärts fahren
- Vorderaugensensor erkennt "grün?"
- Öffnen Sie den Disk Maze Playground und führen Sie das Projekt aus.
Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.