
Pelajaran 3: Menggunakan blok [If then]
Dalam Tantangan Labirin Cakram, Robot VR memeriksa kondisi Sensor Mata Depan untuk melihat warna apa yang dilaporkan. Setiap warna sesuai dengan perilaku berbeda yang harus dilakukan Robot VR.
-
Mulai proyek baru dan beri nama Unit7Lesson3.

-
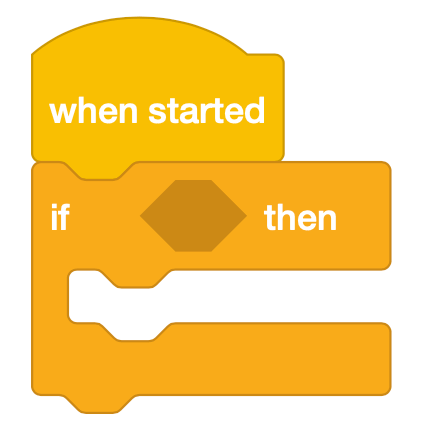
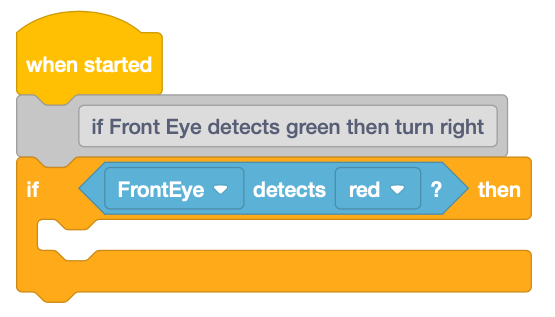
Seret blok [Jika maka] ke dalam ruang kerja dan tempelkan ke blok [Saat dimulai].
Untuk Informasi Anda
Blok [Jika maka] adalah blok C yang menerima blok reporter Boolean sebagai masukan. Dengan menggunakan pola yang diamati saat memecahkan Labirin Cakram dalam Pelajaran 2, sebuah proyek dapat dibuat di mana Robot VR membuat keputusan apakah kondisi dilaporkan sebagai BENAR atau SALAH.
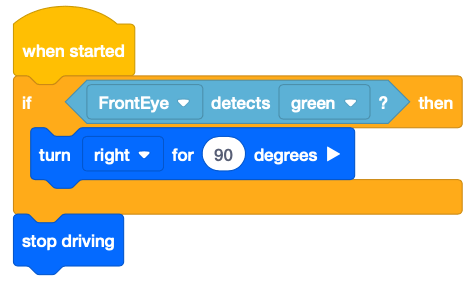
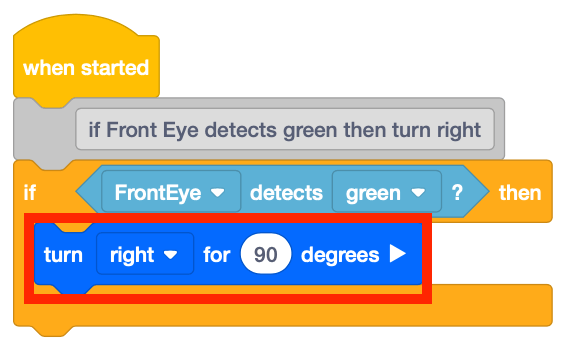
Blok [Jika maka] akan dijalankan satu kali dalam suatu proyek. Dalam contoh ini, Front Eye Sensor akan melaporkan TRUE jika objek hijau terdeteksi, dan menjalankan perintah di dalam blok C - belok kanan sejauh 90 derajat. Jika objek hijau tidak terdeteksi, proyek akan berpindah ke perintah berikutnya dalam tumpukan.
Menggunakan Blok Switch
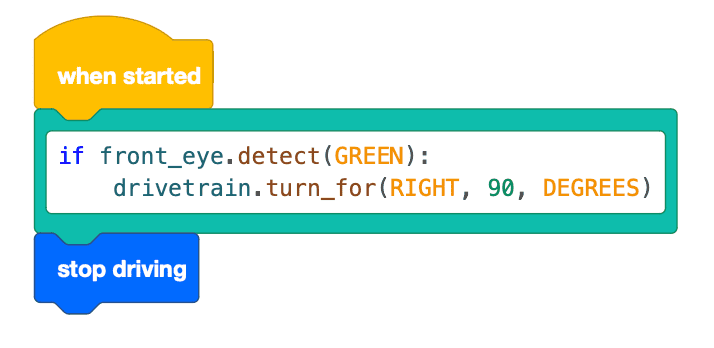
Gambar di bawah menunjukkan pernyataan blok Switch [If then] untuk proyek contoh Pelajaran ini.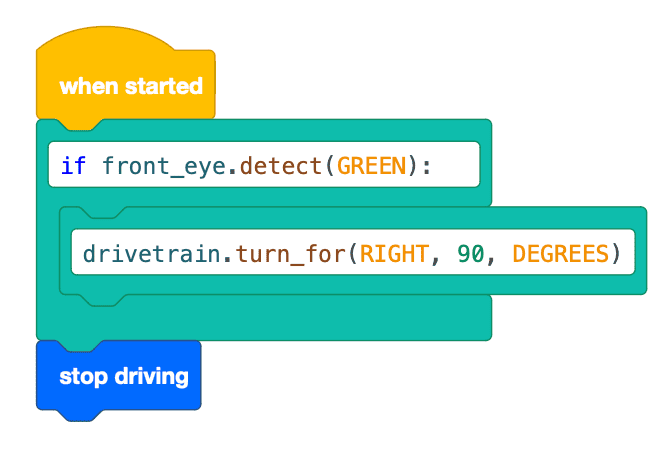
Proyek di bawah ini menyertakan perintah yang sama yang diubah menjadi satu blok Switch.
Baris kode pertama, jika front_eye.detect(GREEN): adalah perulangan kondisional yang memeriksa apakah Sensor Mata Depan mendeteksi warna hijau. Perhatikan bahwa harus ada titik dua (:) di akhir baris ini.
Baris kode kedua, drivetrain.turn_for(RIGHT, 90, DEGREES) memberi tahu robot untuk berbelok ke kanan sejauh 90 derajat saat Front Eye Sensor mendeteksi warna hijau. Baris ini diindentasi dengan default 4 spasikarena ini adalah perilaku spesifik yang akan dilakukan jika Front Eye Sensor mendeteksi warna hijau.
-
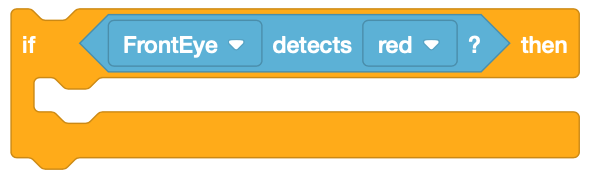
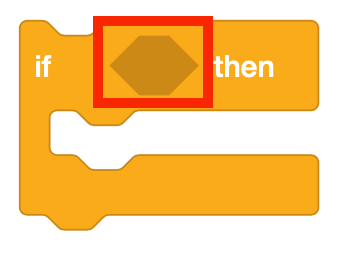
Seret blok <Color sensing> ke ruang kerja ke input heksagonal blok [Jika maka].
-
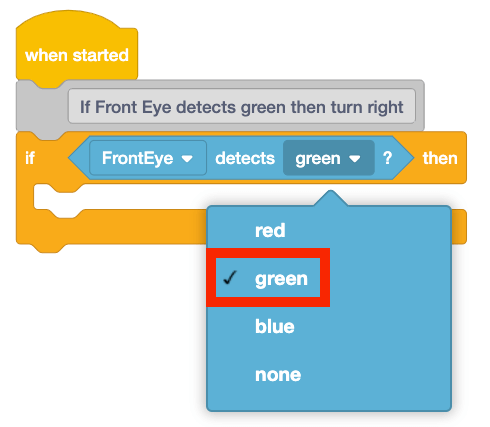
Ubah parameter blok <Color sensing> menjadi 'hijau.'
-
Saat Sensor Mata Depan mendeteksi cakram hijau, Robot VR perlu berbelok ke kanan 90 derajat untuk mulai memecahkan Labirin Cakram. Seret blok [Putar untuk] ke blok [Jika maka].
-
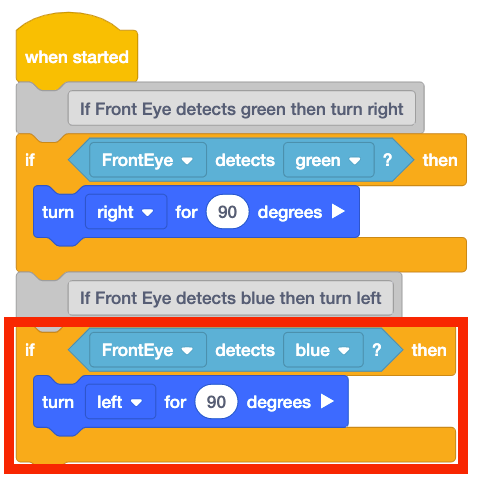
Ikuti langkah yang sama untuk menambahkan blok [Jika maka] lainnya untuk ketiga warna di Disk Maze (hijau, biru, dan merah). Setiap warna dikaitkan dengan perilaku yang berbeda. Blok di dalam blok [If then] harus sesuai dengan perilaku yang dimaksudkan. Tambahkan blok berikut ke proyek. Saat Robot VR mendeteksi warna 'biru,' Robot VR akan berbelok ke kiri 90 derajat.
-
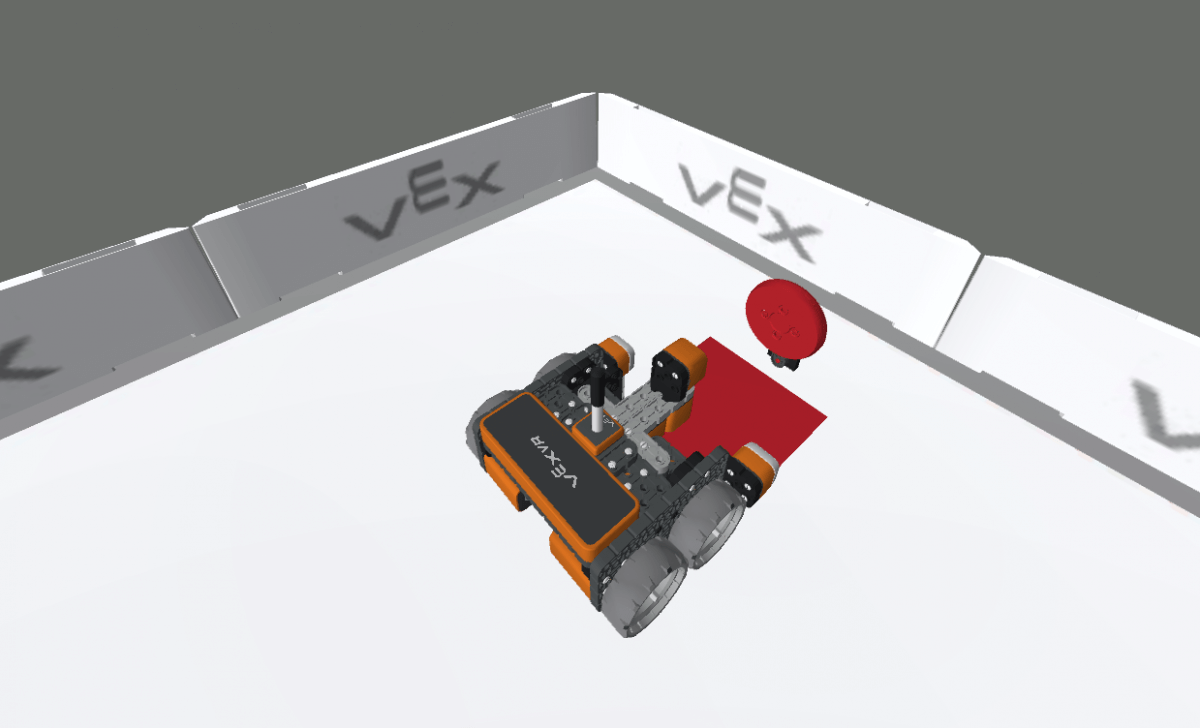
Saat Robot VR mencapai ujung labirin, Robot VR akan mendeteksi warna 'merah.'
-
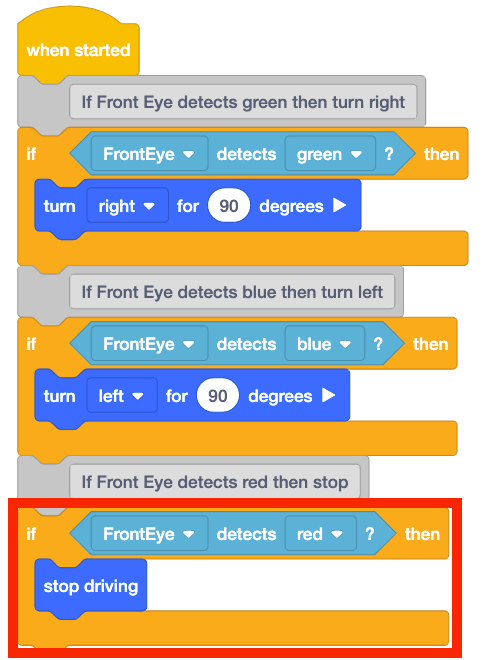
Untuk menghentikan Robot VR, blok [Jika maka] lain perlu ditambahkan dengan instruksi tentang apa yang harus dilakukan saat Robot VR mendeteksi 'merah.' Tambahkan blok berikut ke proyek.
-
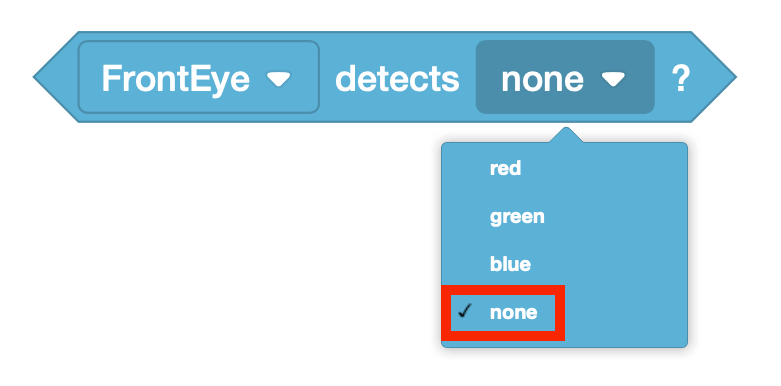
Robot VR juga dapat membuat keputusan jika tidak melihat warna dengan menggunakan nilai 'none'. Pada titik awal Disk Maze, Robot VR tidak mendeteksi warna apa pun.
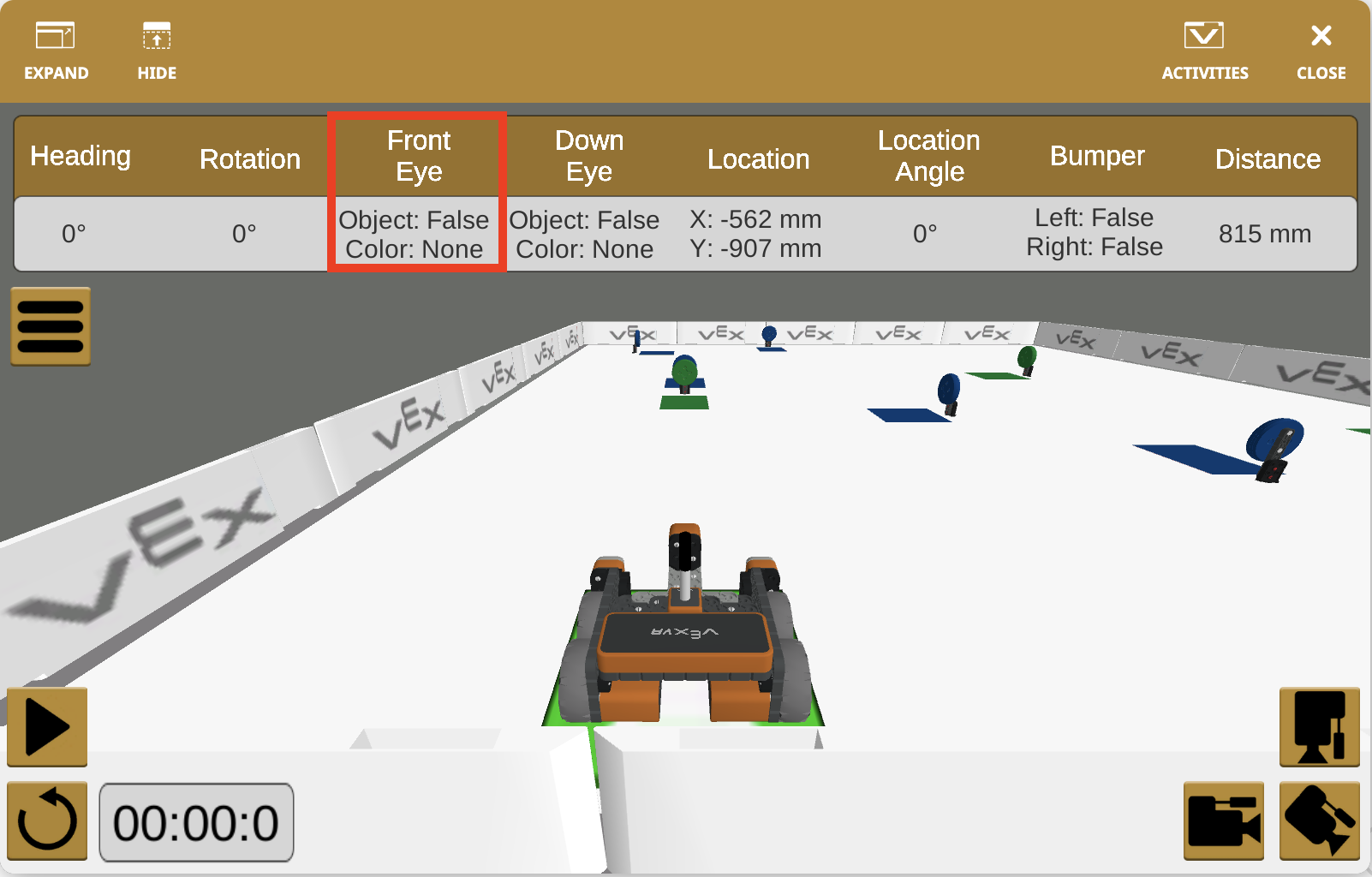
-
Karena Sensor Mata Depan tidak mendeteksi warna di awal Labirin Cakram, Robot VR perlu melaju ke depan hingga mendeteksi cakram hijau. Blok [Jika maka] lainnya dapat ditambahkan untuk memberi instruksi kepada Robot VR tentang apa yang harus dilakukan ketika tidak ada warna yang terdeteksi.
-
Tambahkan blok berikut ke proyek. Jika Robot VR tidak mendeteksi warna apa pun, Robot VR akan melaju maju.
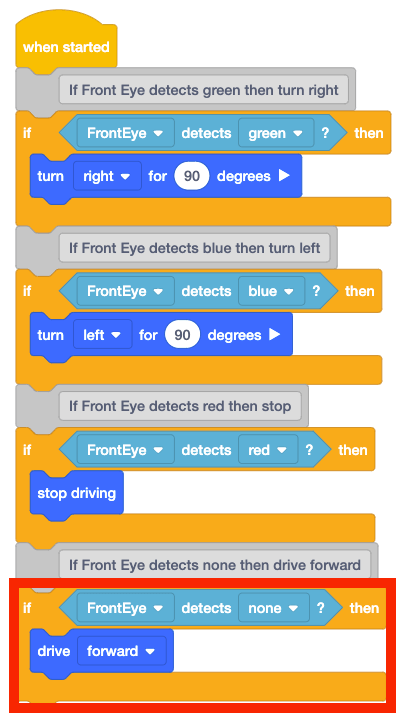
- Robot VR sekarang memiliki instruksi untuk setiap warna yang dideteksi oleh Sensor Mata.
- Sensor Mata Depan mendeteksi 'hijau?'
- Belok kanan 90 derajat
- Sensor Mata Depan mendeteksi 'biru?'
- Belok kiri 90 derajat
- Sensor Mata Depan mendeteksi 'merah?'
- Berhenti mengemudi
- Sensor Mata Depan mendeteksi 'tidak ada?'
- Berkendara maju
- Sensor Mata Depan mendeteksi 'hijau?'
- Buka Disk Maze Playground dan jalankan proyeknya.
Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.