
কন্ট্রোলার: ট্যাঙ্ক ড্রাইভ এক্সপ্লোরেশন- ব্লক-ভিত্তিক
![]() শিক্ষক টুলবক্স
-
এই কার্যকলাপের উদ্দেশ্য
শিক্ষক টুলবক্স
-
এই কার্যকলাপের উদ্দেশ্য
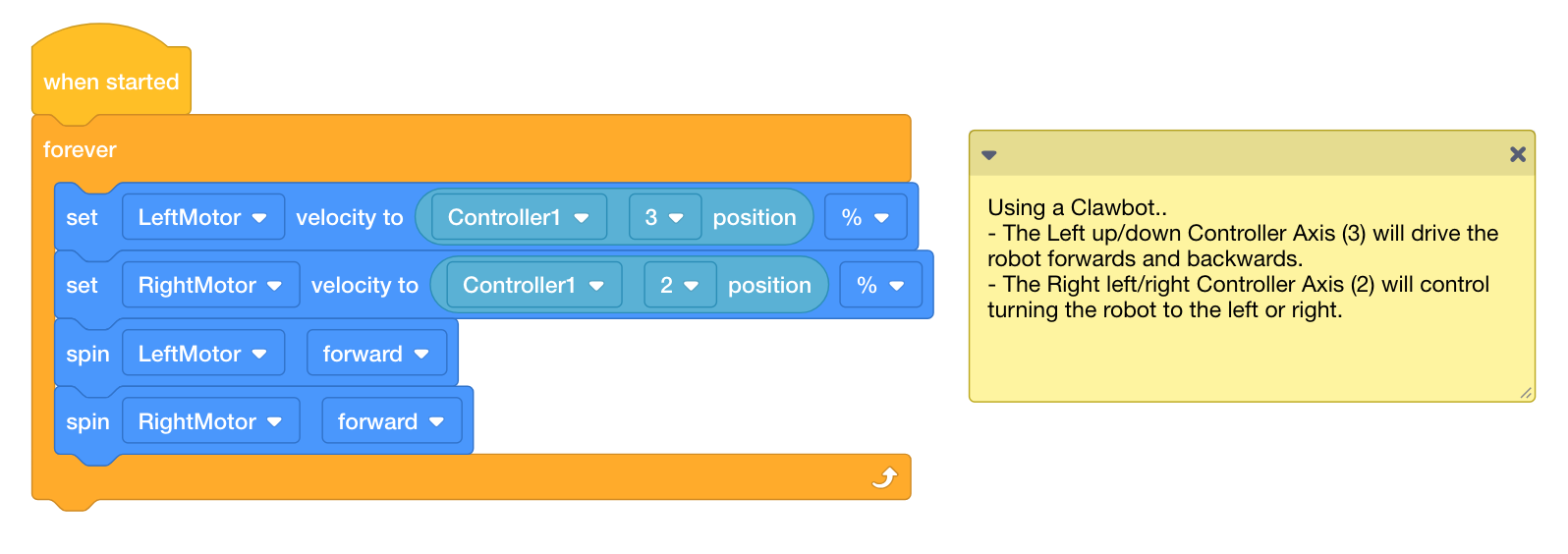
ট্যাঙ্ক ড্রাইভ উদাহরণ প্রকল্পটি ব্যবহার করে শিক্ষার্থীরা কন্ট্রোলার ব্যবহার করে ক্লবট নিয়ন্ত্রণ করতে সক্ষম হয়। ক্লবটের প্রতিটি মোটরের বেগ নিয়ন্ত্রণ করতে এবং কন্ট্রোলারকে মোটর ফাংশন নিয়ন্ত্রণ করতে সক্ষম করতে শিক্ষার্থীদের [মোটর বেগ সেট করুন], [স্পিন] এবং (নিয়ন্ত্রকের অবস্থান) ব্লকের প্যারামিটারগুলি সামঞ্জস্য করতে হবে।
যেকোনো ব্লক সম্পর্কে আরও তথ্যের জন্য, VEXcode V5 এর মধ্যেসহায়তা তথ্যদেখুন।
এই কার্যকলাপে শিক্ষার্থীরা কী করবে তার একটি রূপরেখা নিচে দেওয়া হল:
-
ইউজিং লুপসটিউটোরিয়াল ভিডিওটি দেখুন।
-
ট্যাঙ্ক ড্রাইভ উদাহরণ প্রকল্পটি অন্বেষণ করুন।
-
[চিরকালের] ব্লকের ব্যবহার বুঝুন।
-
রোবো-স্ল্যালম চ্যালেঞ্জটি সম্পূর্ণ করুন!
![]() শিক্ষকদের টিপস
শিক্ষকদের টিপস
যদি শিক্ষার্থীরা প্রথমবারের মতো VEXcode V5 ব্যবহার করে, তাহলে তারা অন্যান্য মৌলিক দক্ষতা শিখতে টুলবারে টিউটোরিয়ালগুলিও দেখতে পারে।
| পরিমাণ | প্রয়োজনীয় উপকরণ |
|---|---|
| 1 |
VEX V5 ক্লাসরুম স্টার্টার কিট (আপ-টু-ডেট ফার্মওয়্যার সহ) |
| 1 |
VEXcode V5 (সর্বশেষ সংস্করণ, উইন্ডোজ, ম্যাকওএস, ক্রোমবুক) |
| 1 |
ইঞ্জিনিয়ারিং নোটবুক |
| 1 |
লুপ ব্যবহার করা (টিউটোরিয়াল) |
| 1 |
ট্যাঙ্ক ড্রাইভের উদাহরণ প্রকল্প |
| 2 বা তার বেশি |
শ্রেণীকক্ষের জিনিসপত্র বাধা হিসেবে ব্যবহার করা হবে |
এই ক্রিয়াকলাপটি আপনাকে আপনার কন্ট্রোলার প্রোগ্রাম করার সরঞ্জাম দেবে ।
ব্লকগুলি সম্পর্কে জানতে আপনি VEXcode V5 এর ভিতরে সহায়তা তথ্য ব্যবহার করতে পারেন । সহায়তা বৈশিষ্ট্যটি ব্যবহার করার ক্ষেত্রে নির্দেশাবলীর জন্য, সহায়তা টিউটোরিয়াল ব্যবহার করুন দেখুন ।

ধাপ 1: কন্ট্রোলার প্রোগ্রামিং শুরু করা যাক ।
- ইউজিং লুপসটিউটোরিয়াল ভিডিওটি দেখে শুরু করুন।
-
ট্যাঙ্ক ড্রাইভউদাহরণ প্রকল্পটি খুলুন।
তোমার ইঞ্জিনিয়ারিং নোটবুকে নিম্নলিখিত কাজগুলো করো:
প্রকল্পটি ক্লবটকে কী করতে দেবে তা ভবিষ্যদ্বাণী করো। প্রকল্পটি যে কন্ট্রোলার ব্যবহার করে তার চেয়েও বেশি কিছু ব্যাখ্যা করুন।
জয়স্টিকগুলি কীভাবে রোবটটিকে নাড়াচাড়া করে? Clawbot কী করছে?
![]() শিক্ষক টুলবক্স
-
উত্তর
শিক্ষক টুলবক্স
-
উত্তর
এই প্রকল্পটি [চিরকালের] ব্লক ব্যবহার করে বাম এবং ডান জয়স্টিকের অবস্থান কোথায় তা ক্রমাগত পরীক্ষা করবে। যখন বাম (অথবা ডান) জয়স্টিকটি উপরে ঠেলে দেওয়া হয়, তখন জয়স্টিকটি কতদূর সামনে ঠেলে দেওয়া হবে তার উপর বেগ নির্ধারিত হয়। সুতরাং, জয়স্টিকটিকে যত সামনের দিকে ঠেলে দেওয়া হবে, বেগ তত দ্রুত সেট হবে এবং মোটরগুলি তত দ্রুত গতিতে চলবে। জয়স্টিকটি নিচে ঠেলে দেওয়ার ক্ষেত্রেও একই ধারণা কাজ করে। জয়স্টিকটি যত নিচে ঠেলে দেওয়া হবে, মোটরগুলি তত দ্রুত বিপরীত দিকে যাবে।
-
ট্যাঙ্ক ড্রাইভউদাহরণ প্রকল্পটি সংরক্ষণ করুন, ডাউনলোড করুন এবংরান করুন

-
সাহায্যএর জন্য, VEXcode V5 এর টিউটোরিয়ালটি দেখুন যেখানে একটি প্রকল্প ডাউনলোড এবং চালানোর পদ্ধতি ব্যাখ্যা করা হয়েছে।
- আপনার ইঞ্জিনিয়ারিং নোটবুকে প্রকল্পের আপনার ব্যাখ্যাগুলি পরীক্ষা করুন এবং প্রয়োজন অনুসারে সেগুলি সংশোধন করতে নোট যোগ করুন ।
ধাপ 2: কন্ট্রোলার: ট্যাঙ্ক ড্রাইভ
![]() শিক্ষক টুলবক্স
-
[চিরকালের জন্য] ব্লক
শিক্ষক টুলবক্স
-
[চিরকালের জন্য] ব্লক
এই ধাপে [চিরকালের] ব্লকের গুরুত্ব নিয়ে আলোচনা করা হয়েছে। আপনার তথ্যটি একটি শ্রেণি হিসেবে পর্যালোচনা করা উচিত। তুমি তোমার Clawbot এবং Controller দিয়ে আচরণটি মডেল করতে পারো, অথবা যদি সময় অনুমতি দেয়, তাহলে শিক্ষার্থীদের [চিরকালের] ব্লক ছাড়াই প্রোগ্রামটি চালাতে বলতে পারো।
[চিরকালের] ব্লক ব্যবহারের সুবিধা কী কী?
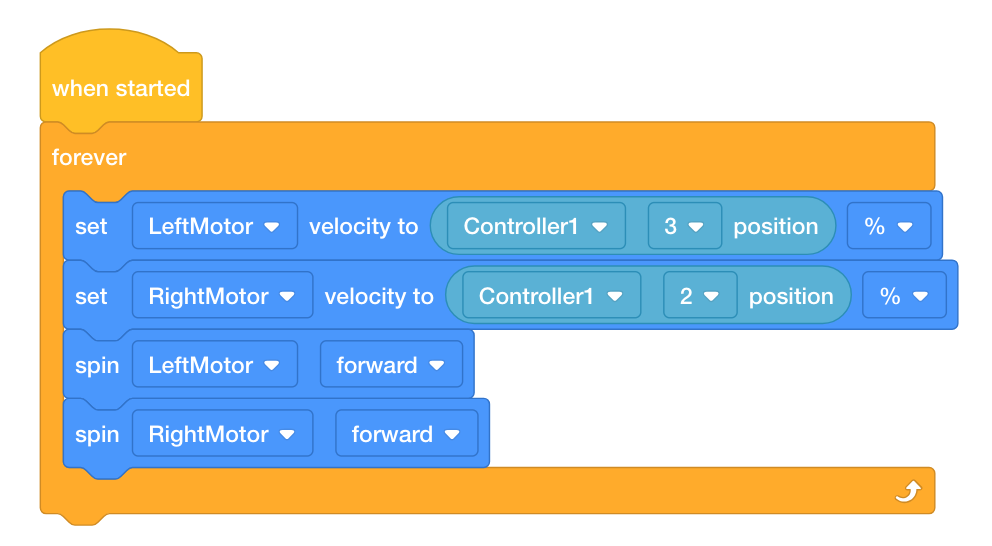
[চিরকালের] ব্লক ছাড়াই আমাদের প্রকল্পটি এখানে:

এই প্রোগ্রামটি চালানো হলে আপনার কী মনে হয়? একটি দল হিসাবে আলোচনা করুন । ইঞ্জিনিয়ারিং নোটবুকে আপনার ভবিষ্যদ্বাণী লিখুন ।
![]() শিক্ষক টুলবক্স
-
ব্লকটি বোঝা
শিক্ষক টুলবক্স
-
ব্লকটি বোঝা
[চিরকালের] লুপ ছাড়া, প্রকল্পটি চালানোর সাথে সাথে প্রতিটি মোটরের বেগের মান সেট করা হয় এবং প্রকল্পটি বন্ধ না হওয়া পর্যন্ত সেই মান স্থির থাকে। অন্য কথায়, যদি আপনি জয়স্টিকটি না সরালেও প্রকল্পটি চালান, কারণ জয়স্টিকের অক্ষের উপর ডিফল্ট অবস্থান 0, তাহলে উভয় মোটরের বেগ 0 থাকবে, এমনকি যদি আপনি জয়স্টিকটি নাড়ান।
একইভাবে, ধরুন আপনি বাম জয়স্টিকটিকে ৩ নম্বর অবস্থান বরাবর যতদূর যেতে পারে ততদূর উপরে নিয়ে যান এবং সেখানে ধরে রাখুন। উপরের প্রকল্পটি চালালে, বাম মোটরটি পূর্ণ গতিতে চলবে এবং জয়স্টিকটিকে ৩ নম্বর অবস্থান ধরে নীচে নামান, এমনকি যদি আপনি এটিকে সেই গতিতেই রাখবেন। কারণ প্রকল্পটি চালানোর সাথে সাথে Clawbot কন্ট্রোলারের কাছ থেকে প্রাথমিক নির্দেশনা পায়; তবে, Loop ছাড়া, সেই প্রাথমিক মান আপডেট করা যাবে না।
[চিরকালের] লুপটি Clawbot কে ক্রমাগত বেগ আপডেট করতে এবং প্রকল্পের সময়কালের জন্য চলতে বলে। অন্য কথায়, এই প্রকল্পে [চিরকালের] লুপ আপনাকে জয়স্টিককে অবস্থান 2 বা 3 বরাবর সরানোর মাধ্যমে প্রতিটি মোটরের বেগ পরিবর্তন করতে সক্ষম করে এবং ক্লবট সেই অনুযায়ী সাড়া দেবে যতক্ষণ না আপনি প্রকল্পটি বন্ধ করেন বা ক্লবটটি বন্ধ করেন।
ধাপ 3: একটি স্লালম কোর্স নেভিগেট করুন!
![]() শিক্ষক টুলবক্স
-
অ্যাক্টিভিটি সেটআপ করুন
শিক্ষক টুলবক্স
-
অ্যাক্টিভিটি সেটআপ করুন
শিক্ষার্থীদের ২ বা ৪ জনের ছোট ছোট দলে সংগঠিত করুন। একজন শিক্ষার্থীকে ড্রাইভার হিসেবে মনোনীত করা উচিত - যিনি কন্ট্রোলার ব্যবহার করে ক্লবটটি চালাবেন।
প্রতিটি "পতাকার" বাইরের দিকে ক্লবটটি সরাতে কন্ট্রোলার ব্যবহার করে শিক্ষার্থীদের এই স্ল্যালমটি সম্পূর্ণ করতে বলুন। ক্লবটের পথ অবশ্যই এটিকে কোনও পতাকা স্পর্শ করতে বাধা দেবে এবং এটিকে শেষ রেখা অতিক্রম করতে দেবে। পতাকা আপনার হাতে থাকা যেকোনো শ্রেণীকক্ষের উপকরণ/বস্তু (ইরেজার, টেপের রোল, টিস্যু বক্স) হতে পারে এবং ক্লবট চালানোর আগে এগুলি স্থাপন করা যেতে পারে।
যদি সময় অনুমতি দেয়, তাহলে শিক্ষার্থীদের ভূমিকা পরিবর্তন করতে বলুন যাতে অন্যরা ক্লবট চালানোর সুযোগ পায়। প্রতিটি চালক কত দ্রুত স্ল্যালম চালাতে পারে তা দেখে আপনি এটিকে দলের মধ্যে বা দলের মধ্যে প্রতিযোগিতায় পরিণত করতে পারেন।

Slaloms হল এমন কোর্স যা অংশগ্রহণকারীকে অবশ্যই সেট ফ্ল্যাগ বা মার্কারের চারপাশে নেভিগেট করতে হবে । স্কি স্ল্যাম একটি জনপ্রিয় শীতকালীন খেলা এবং শীতকালীন অলিম্পিকে অন্তর্ভুক্ত করা হয় ।
এখন যেহেতুকন্ট্রোলারটিজোড়া হয়েছে এবং প্রকল্পটিডাউনলোড হয়েছে, আপনি কন্ট্রোলার ব্যবহার করে আপনার Clawbot সরাতে প্রস্তুত!
- শিক্ষকের কাছ থেকে চারটি শ্রেণীকক্ষের আইটেমগুলি সংগ্রহ করুন যা আপনি আপনার স্লালমে পতাকা হিসাবে ব্যবহার করবেন ।
- স্লালম ডায়াগ্রাম অনুযায়ী, ড্রাইভারকে ক্লবোটের চারপাশে নেভিগেট করার জন্য পতাকাগুলি স্থাপন করতে সহযোগিতা করুন ।
- ট্যাঙ্ক ড্রাইভের উদাহরণ প্রকল্প ডাউনলোড করুন । কোনও প্রকল্প কীভাবে ডাউনলোড করবেন সে সম্পর্কে কোনও প্রশ্ন থাকলে, ডাউনলোডটি দেখুন এবং একটি প্রকল্প টিউটোরিয়াল চালান ।
![]() অনুপ্রেরণামূলক আলোচনা
-
কার্যকলাপ সম্পর্কে চিন্তাভাবনা
অনুপ্রেরণামূলক আলোচনা
-
কার্যকলাপ সম্পর্কে চিন্তাভাবনা
প্রশ্ন:ক্লবট কি কন্ট্রোলারের কাছে আপনার প্রত্যাশা অনুযায়ী উত্তর দিয়েছে?
উত্তর:উত্তর ভিন্ন হতে পারে; তবে, এই প্রশ্নের লক্ষ্য হলো জ্ঞানীয় চিন্তাভাবনাকে উৎসাহিত করা। শিক্ষার্থীরা আচরণ পরীক্ষা করার আগে ভবিষ্যদ্বাণী করে, তাদের ফলাফল নথিভুক্ত করে এবং প্রতিফলিত করে শুরু করে।
প্রশ্ন:ক্লবটকে সরলরেখায় সামনের দিকে বা বিপরীত দিকে সরানোর ক্ষেত্রে সবচেয়ে বড় চ্যালেঞ্জ কী?
উত্তর:যদিও উত্তরগুলি ভিন্ন হতে পারে, একটি সাধারণ প্রতিক্রিয়া হওয়া উচিত যে উভয় জয়স্টিককে একে অপরের সাথে সুসংগতভাবে চলতে হবে যাতে নিশ্চিত করা যায় যে ক্লবটের মোটরগুলি একই দিকে এবং একই বেগে চলছে।
প্রশ্ন:[forever] লুপ ব্যবহার করলে কীভাবে আপনি Clawbot সরানোর জন্য কন্ট্রোলার ব্যবহার করতে পারবেন?
A:forever লুপ ছাড়া, Clawbot শুধুমাত্র একবার প্রকল্পের ব্লক দ্বারা নির্ধারিত আচরণ সম্পাদন করবে। ফরএভার লুপটি ক্লবটকে ক্রমাগত বেগ আপডেট করতে এবং প্রকল্পের সময়কালের জন্য চলতে বলে। অন্য কথায়, ফরএভার লুপ আপনাকে কন্ট্রোলার ব্যবহার করে ক্লবটকে অনির্দিষ্টকালের জন্য বা ব্যাটারি শেষ না হওয়া পর্যন্ত সরাতে সক্ষম করে।
ধাপ 4: Robo-Slalom
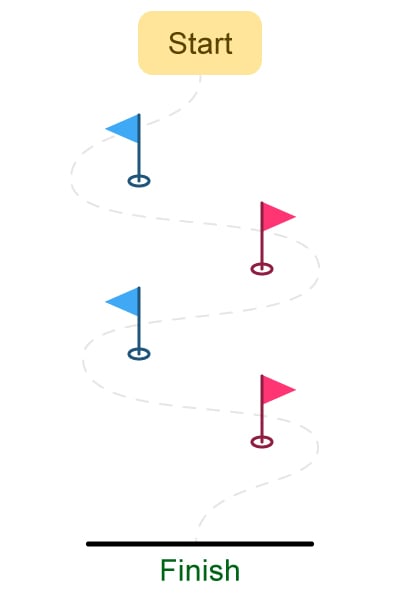
প্রতিটি "ফ্ল্যাগের" বাইরে আপনার Clawbot সরানোর জন্য কন্ট্রোলার ব্যবহার করুন । রোবটের পথ অবশ্যই এটিকে কোনও পতাকা স্পর্শ করা থেকে বিরত রাখতে হবে এবং এটি ফিনিস লাইনটি অতিক্রম করার অনুমতি দিতে হবে ।
- প্রকল্পটি চালান এবং ক্লবটটি সামনে এবং বিপরীত দিকে চালান এবং জয়স্টিক ব্যবহার করে বাম এবং ডানদিকে ঘুরুন ।
- ক্লবোটের কোর্সটি সম্পূর্ণ করতে কত সময় লাগে । ইঞ্জিনিয়ারিং নোটবুকে সময় নথিভুক্ত করুন ।
- Slalom কোর্সের মাধ্যমে আপনি কত দ্রুত Clawbot পেতে পারেন?