
Pengendali: Eksplorasi Penggerak Tangki - Berbasis Blok
 Kotak Alat Guru
-
Tujuan Kegiatan Ini
Kotak Alat Guru
-
Tujuan Kegiatan Ini
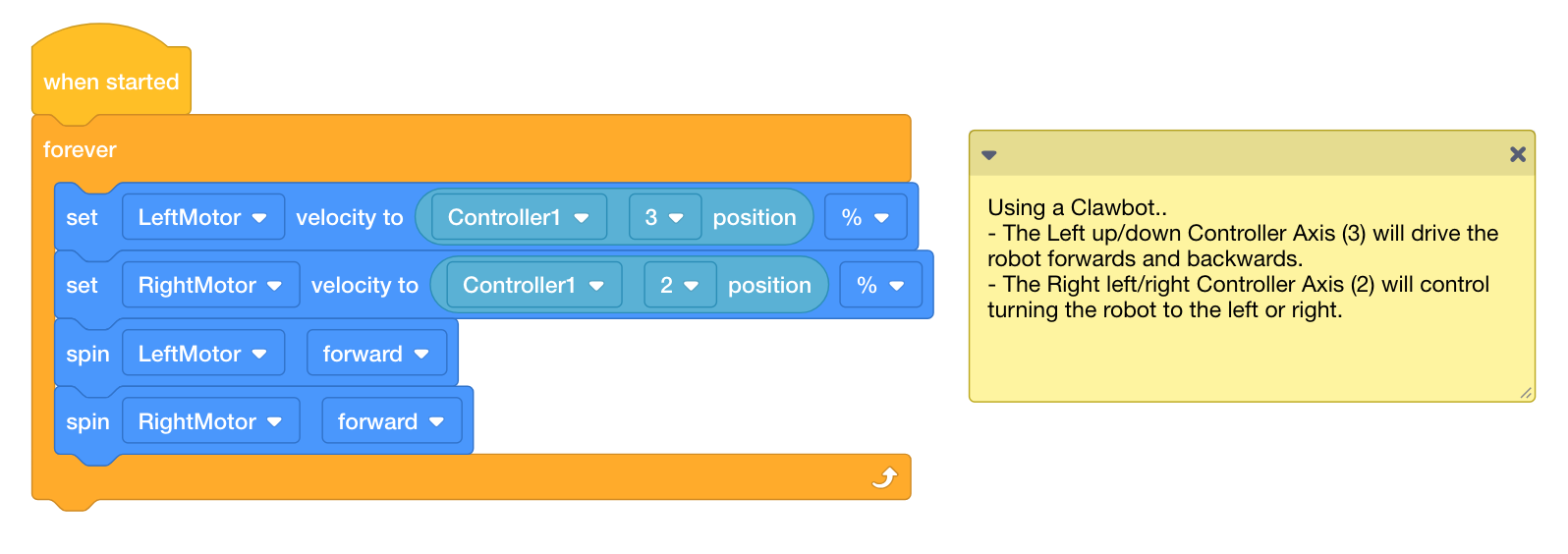
Menggunakan proyek contoh Tank Drive memungkinkan siswa mengendalikan Clawbot menggunakan Pengontrol. Siswa perlu menyesuaikan parameter di blok [atur kecepatan motor], [putar], dan (posisi pengontrol) untuk mengendalikan kecepatan setiap motor Clawbot dan memungkinkan Pengontrol untuk mengendalikan fungsi motor.
Untuk informasi lebih lanjut tentang blok mana pun, kunjungi informasi bantuandalam VEXcode V5.
Berikut ini adalah garis besar apa yang akan dilakukan siswa dalam kegiatan ini:
-
Tonton video tutorialMenggunakan Loop.
-
Jelajahi proyek contoh Tank Drive.
-
Pahami penggunaan blok [forever].
-
Selesaikan tantangan Robo-Slalom!
 Tips Guru
Tips Guru
Jika ini adalah pertama kalinya siswa menggunakan VEXcode V5, mereka juga dapat melihat Tutorial di bilah alat untuk mempelajari keterampilan dasar lainnya.
| Kuantitas | Bahan-bahan yang Dibutuhkan |
|---|---|
| 1 |
Kit Pemula Kelas VEX V5 (dengan firmware terbaru) |
| 1 |
VEXcode V5 (versi terbaru, Windows, macOS, Chromebook) |
| 1 |
Buku Catatan Teknik |
| 1 |
Menggunakan Loop (Tutorial) |
| 1 |
Contoh proyek Penggerak Tangki |
| 2 atau lebih |
Barang-barang kelas yang akan digunakan sebagai rintangan |
Aktivitas ini akan memberi Anda alat untuk memprogram Pengontrol Anda.
Anda dapat menggunakan informasi Bantuan di dalam VEXcode V5 untuk mempelajari tentang blok. Untuk panduan dalam menggunakan fitur Bantuan, lihat tutorial Menggunakan Bantuan.

Langkah 1: Mari mulai memprogram Pengendali.
- Mulailah dengan menonton video tutorialMenggunakan Loop.
-
Buka proyek contoh Tank Drive.
Lakukan hal berikut di buku catatan teknik Anda:
Prediksikan apa yang akan dilakukan Clawbot dalam proyek tersebut. Jelaskan lebih dari sekadar fakta bahwa proyek tersebut memanfaatkan Pengendali.
Bagaimana joystick menggerakkan robot? Apa yang dilakukan Clawbot?
Kotak Alat Guru
-
Jawaban
Proyek ini akan memanfaatkan blok [forever] untuk terus memeriksa posisi Joystick kiri dan kanan. Saat Joystick kiri (atau kanan) didorong ke atas, kecepatannya diatur sejauh mana Joystick didorong ke depan. Dengan demikian, semakin jauh Joystick didorong ke depan, semakin cepat kecepatan akan diatur dan semakin cepat pula motor akan bergerak. Ide yang sama berlaku untuk mendorong Joystick ke bawah. Semakin jauh Joystick ditekan, semakin cepat motor akan bergerak mundur.
-
Simpan, unduh, danjalankanproyek contoh Tank Drive.

-
Untuk bantuan, lihat tutorial di VEXcode V5 yang menjelaskan cara Mengunduh dan Menjalankan Proyek.
- Periksa penjelasan Anda tentang proyek di buku catatan teknik Anda dan tambahkan catatan untuk memperbaikinya bila diperlukan.
Langkah 2: Pengontrol: Penggerak Tangki
Kotak Alat Guru
-
blok [Selamanya]
Langkah ini membahas pentingnya blok [selamanya]. Anda harus meninjau informasi tersebut sebagai sebuah kelas. Anda dapat memodelkan perilaku dengan Clawbot dan Controller Anda, atau jika waktu memungkinkan, mintalah siswa menjalankan program tanpa blok [selamanya].
Apa keuntungan menggunakan blok [forever]?
Berikut adalah proyek kami tanpa blok [forever]:
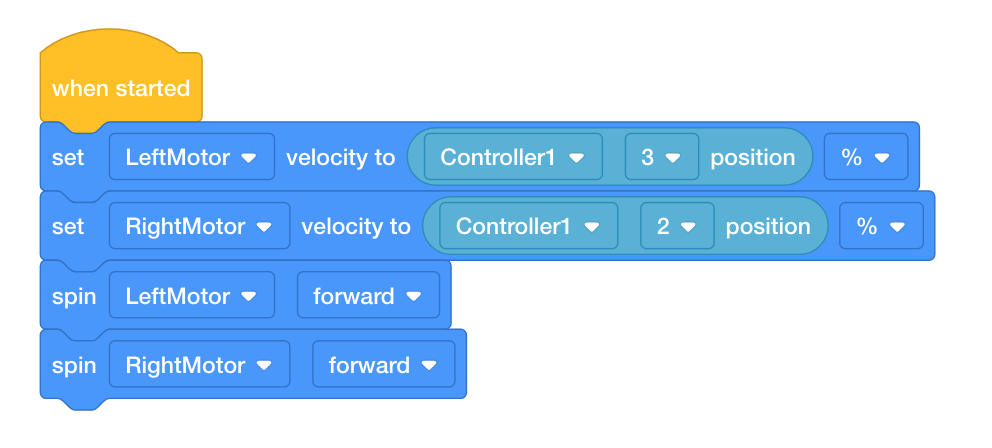
Menurut Anda apa yang akan terjadi jika program ini dijalankan? Diskusikan sebagai kelompok. Tuliskan prediksi Anda di buku catatan teknik.
Kotak Alat Guru
-
Memahami Blok
Tanpa loop [selamanya], nilai kecepatan untuk setiap motor ditetapkan segera setelah proyek dijalankan, dan nilai tersebut tetap konstan hingga proyek dihentikan. Dengan kata lain, jika Anda menjalankan proyek tanpa menggerakkan Joystick, karena posisi default Joystick pada porosnya adalah 0, kecepatan kedua motor akan tetap pada 0, bahkan jika Anda menggerakkan Joystick.
Dengan cara yang sama, katakanlah Anda menggerakkan Joystick kiri ke atas sejauh mungkin sepanjang posisi 3 dan menahannya di sana. Jika Anda menjalankan proyek di atas, motor kiri akan bergerak dengan kecepatan penuh dan akan tetap pada kecepatan itu bahkan jika Anda menggerakkan Joystick ke bawah sepanjang posisi 3. Hal ini karena Clawbot menerima instruksi awal dari Controller segera setelah proyek dijalankan; namun, tanpa Loop, nilai awal tersebut tidak dapat diperbarui.
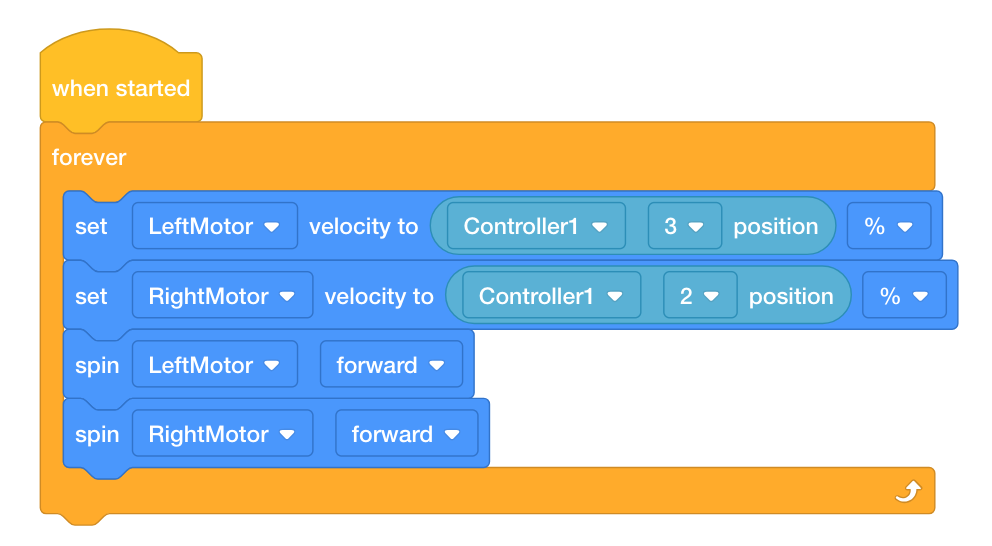
Loop [selamanya] memberi tahu Clawbot untuk terus memperbarui kecepatan dan berjalan selama durasi proyek. Dengan kata lain, loop [selamanya], dalam proyek ini, memungkinkan Anda mengubah kecepatan setiap motor dengan menggerakkan Joystick sepanjang posisi 2 atau 3, dan Clawbot akan merespons sesuai kebutuhan hingga Anda menghentikan proyek atau mematikan Clawbot.
Langkah 3: Jelajahi Lintasan Slalom!
Kotak Alat Guru
-
Menyiapkan Aktivitas
Aturlah siswa ke dalam kelompok-kelompok kecil yang beranggotakan 2 atau 4 siswa. Satu siswa harus ditunjuk sebagai Pengemudi - orang yang akan menggunakan Pengendali untuk mengendalikan Clawbot.
Mintalah siswa menyelesaikan slalom ini dengan menggunakan Controller untuk menggerakkan Clawbot di sepanjang bagian luar setiap “bendera”. Lintasan Clawbot harus mencegahnya menyentuh bendera apa pun dan memungkinkannya melewati garis finis. Bendera dapat berupa bahan/objek kelas apa pun yang Anda miliki (penghapus, gulungan selotip, kotak tisu) dan dapat dipasang sebelum mengoperasikan Clawbot.
Jika waktu memungkinkan, mintalah siswa berganti peran untuk memberi kesempatan kepada siswa lain mengendarai Clawbot. Anda bahkan dapat mengubahnya menjadi kompetisi dalam kelompok atau antar kelompok dengan melihat seberapa cepat setiap pengemudi dapat menavigasi slalom.

Slalom adalah lintasan yang harus dilalui peserta dengan melewati bendera atau penanda yang ditentukan. Ski slalom adalah olahraga musim dingin yang populer dan termasuk dalam Olimpiade Musim Dingin.
Sekarang setelahController dipasangkandan proyekdiunduh, Anda siap untuk menggerakkan Clawbot menggunakan Controller!
- Kumpulkan empat benda kelas yang akan Anda gunakan sebagai bendera dalam slalom Anda dari guru.
- Berkolaborasilah untuk menetapkan bendera agar Pengemudi dapat menavigasi Clawbot, sesuai dengan diagram slalom.
- Unduh contoh proyek Tank Drive. Jika ada pertanyaan tentang cara mengunduh proyek, lihat tutorial Unduh dan Jalankan Proyek.
 Memotivasi Diskusi
-
Merefleksikan Kegiatan
Memotivasi Diskusi
-
Merefleksikan Kegiatan
T:Apakah Clawbot merespons Pengendali seperti yang Anda harapkan?
J:Jawaban akan bervariasi; namun, tujuan pertanyaan ini adalah untuk meningkatkan pemikiran kognitif. Siswa memulai dengan memprediksi perilaku sebelum mengujinya, mendokumentasikan hasilnya, dan melakukan refleksi.
T:Apa tantangan terbesar dalam menggerakkan Clawbot maju atau mundur dalam garis lurus?
J:Meskipun jawabannya mungkin beragam, jawaban yang umum adalah kedua Joystick harus bergerak sinkron satu sama lain untuk memastikan motor Clawbot bergerak ke arah dan kecepatan yang sama.
T:Bagaimana penggunaan loop [forever] memungkinkan Anda untuk terus menggunakan Controller guna menggerakkan Clawbot?
J:Tanpa loop forever, Clawbot hanya akan menjalankan perilaku yang ditentukan oleh blok dalam proyek satu kali. Putaran abadi memberi tahu Clawbot untuk terus memperbarui kecepatan dan berjalan selama durasi proyek. Dengan kata lain, putaran selamanya memungkinkan Anda menggunakan Pengendali untuk menggerakkan Clawbot tanpa batas, atau hingga baterainya habis.
Langkah 4: Robo-Slalom

Gunakan Controller untuk menggerakkan Clawbot Anda di sepanjang bagian luar setiap “bendera”. Lintasan robot harus mencegahnya menyentuh bendera apa pun, dan memungkinkannya melewati garis finis.
- Jalankan proyek dan gerakkan Clawbot maju dan mundur, serta belok kiri dan kanan menggunakan kedua Joystick.
- Hitung berapa lama waktu yang dibutuhkan Clawbot untuk menyelesaikan lintasannya. Dokumentasikan waktu pada buku catatan teknik.
- Seberapa cepat Anda bisa membawa Clawbot melewati lintasan Slalom?