
Controller: Panzerantrieb, Erkundung – blockbasiert
![]() Lehrer-Toolbox
-
Der Zweck dieser Aktivität
Lehrer-Toolbox
-
Der Zweck dieser Aktivität
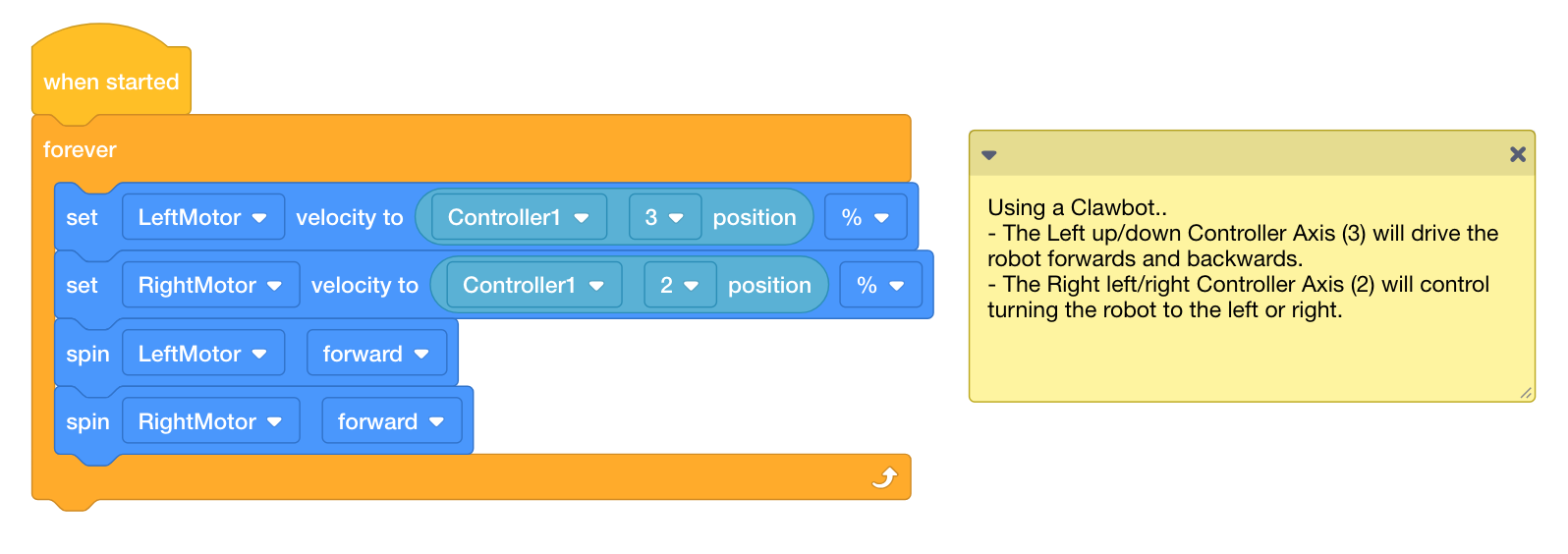
Durch die Verwendung des Beispielprojekts „Tank Drive“ können die Schüler den Clawbot mithilfe des Controllers steuern. Die Schüler müssen die Parameter in den Blöcken [Motorgeschwindigkeit einstellen], [Drehen], und (Position des Controllers) anpassen, um die Geschwindigkeit für jeden Motor des Clawbots zu steuern und den Controller in die Lage zu versetzen, die Motorfunktionen zu steuern.
Weitere Informationen zu den einzelnen Blöcken finden Sie in den Hilfeinformationen in VEXcode V5.
Nachfolgend finden Sie einen Überblick über die Aufgaben der Schülerinnen und Schüler in dieser Aktivität:
-
Sehen Sie sich das Anleitungsvideo Verwenden von Loops an.
-
Entdecken Sie das Beispielprojekt „Tank Drive“.
-
Verstehen Sie die Verwendung des Blocks [forever] .
-
Schließe die Robo-Slalom-Herausforderung ab!
![]() Tipps für Lehrer
Tipps für Lehrer
Wenn die Schüler VEXcode V5 zum ersten Mal verwenden, können sie sich auch die Tutorials in der Symbolleiste ansehen, um andere grundlegende Fähigkeiten zu erlernen.
| Menge | Benötigte Materialien |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit (mit aktueller Firmware) |
| 1 |
VEXcode V5 (neueste Version, Windows, macOS, Chromebook) |
| 1 |
Technisches Notizbuch |
| 1 |
Verwenden von Schleifen (Tutorial) |
| 1 |
Beispielprojekt Tank Drive |
| 2 oder mehr |
Unterrichtsgegenstände, die als Hindernisse verwendet werden können |
Diese Aktivität vermittelt Ihnen die Werkzeuge zum Programmieren Ihres Controllers.
Sie können die Hilfeinformationen in VEXcode V5 verwenden, um mehr über die Blöcke zu erfahren. Anleitungen zur Verwendung der Hilfefunktion finden Sie im Lernprogramm „Hilfe verwenden“.

Schritt 1: Beginnen wir mit der Programmierung des Controllers.
- Sehen Sie sich zunächst das Anleitungsvideo Verwenden von Loops an.
-
Öffnen Sie das Beispielprojekt Tank Drive .
Führen Sie in Ihrem technischen Notizbuch Folgendes durch:
Sagen Sie voraus, was der Clawbot im Rahmen des Projekts tun soll. Erklären Sie mehr als nur die Tatsache, dass das Projekt den Controller verwendet.
Wie bewegen die Joysticks den Roboter? Was macht der Clawbot?
![]() Lehrer-Toolbox
-
Antworten
Lehrer-Toolbox
-
Antworten
Dieses Projekt nutzt den Block [forever] um kontinuierlich zu überprüfen, wo sich die Positionen des linken und rechten Joysticks befinden. Wenn der linke (oder rechte) Joystick nach oben gedrückt wird, wird die Geschwindigkeit dadurch bestimmt, wie weit der Joystick nach vorne gedrückt wird. Je weiter der Joystick nach vorne gedrückt wird, desto höher ist die Geschwindigkeit und desto schneller bewegen sich die Motoren. Dasselbe Prinzip funktioniert auch, wenn Sie den Joystick nach unten drücken. Je weiter der Joystick nach unten gedrückt wird, desto schneller bewegen sich die Motoren rückwärts.
-
Speichern, herunterladen und ausführen des Beispielprojekts „Tank Drive“ .

-
Hilfe finden Sie im Tutorial in VEXcode V5 in dem das Herunterladen und Ausführen eines Projekts erklärt wird.
- Überprüfen Sie Ihre Erklärungen zum Projekt in Ihrem technischen Notizbuch und fügen Sie bei Bedarf Korrekturnotizen hinzu.
Schritt 2: Controller: Tankantrieb
![]() Lehrer-Toolbox
-
[Für immer] Blöcke
Lehrer-Toolbox
-
[Für immer] Blöcke
In diesem Schritt wird die Bedeutung des Blocks [forever] erläutert. Sie sollten die Informationen als Klasse durchgehen. Sie können das Verhalten mit Ihrem Clawbot und Controller modellieren oder, wenn die Zeit es erlaubt, die Schüler das Programm ohne den Block [forever] ausführen lassen.
Welche Vorteile bietet die Verwendung des Blocks [forever] ?
Hier ist unser Projekt ohne den Block [forever]:
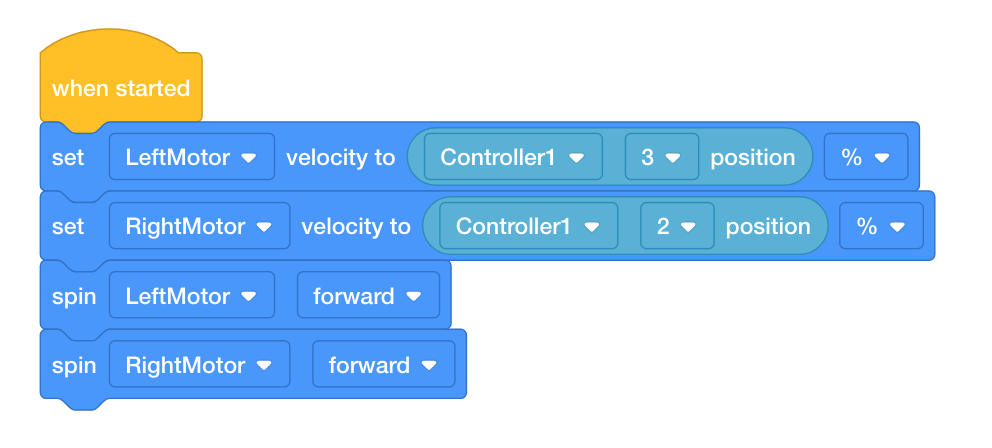
Was würde Ihrer Meinung nach passieren, wenn dieses Programm ausgeführt würde? Besprechen Sie es in der Gruppe. Notieren Sie Ihre Vorhersage im technischen Notizbuch.
![]() Lehrer-Toolbox
-
Den Block verstehen
Lehrer-Toolbox
-
Den Block verstehen
Ohne die Schleife [forever] wird der Geschwindigkeitswert für jeden Motor festgelegt, sobald das Projekt ausgeführt wird, und dieser Wert bleibt konstant, bis das Projekt gestoppt wird. Mit anderen Worten: Wenn Sie das Projekt ausführen, ohne einen der Joysticks zu bewegen, bleibt die Geschwindigkeit beider Motoren auf 0, selbst wenn Sie den Joystick bewegen, da die Standardposition des Joysticks auf seiner Achse 0 ist.
Ebenso bewegen Sie den linken Joystick entlang der Position 3 so weit wie möglich nach oben und halten ihn dort. Wenn Sie das obige Projekt ausführen, bewegt sich der linke Motor mit voller Geschwindigkeit und behält diese Geschwindigkeit bei, auch wenn Sie den Joystick entlang Position 3 nach unten bewegen. Dies liegt daran, dass Clawbot seine erste Anweisung vom Controller erhält, sobald das Projekt ausgeführt wird. Ohne eine Schleife kann dieser Anfangswert jedoch nicht aktualisiert werden.
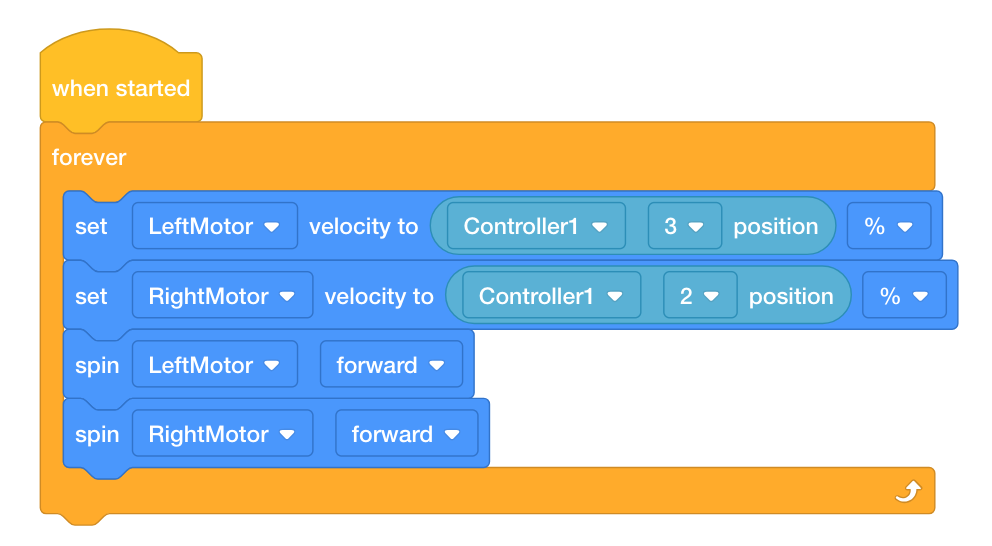
Die Schleife [forever] weist den Clawbot an, die Geschwindigkeit ständig zu aktualisieren und für die Dauer des Projekts zu laufen. Mit anderen Worten ermöglicht Ihnen die Schleife [forever] in diesem Projekt, die Geschwindigkeit jedes Motors zu ändern, indem Sie entweder den Joystick entlang der Position 2 oder 3 bewegen. Der Clawbot reagiert entsprechend, bis Sie das Projekt stoppen oder den Clawbot ausschalten.
Schritt 3: Navigieren Sie einen Slalomkurs!
![]() Lehrer-Toolbox
-
Einrichten der Aktivität
Lehrer-Toolbox
-
Einrichten der Aktivität
Teilen Sie die Schüler in kleine Gruppen von zwei oder vier Schülern ein. Ein Schüler sollte zum Fahrer bestimmt werden – die Person, die den Controller zum Manövrieren des Clawbots verwendet.
Lassen Sie die Schüler diesen Slalom absolvieren, indem sie den Clawbot mit dem Controller an der Außenseite jeder „Flagge“ entlang bewegen. Der Weg des Clawbots muss verhindern, dass er eine Flagge berührt, und ihm das Überqueren der Ziellinie ermöglichen. Als Fahnen können beliebige Unterrichtsmaterialien/Gegenstände dienen, die Sie zur Hand haben (Radiergummi, Klebebandrolle, Taschentuchbox) und können vor dem Betrieb des Clawbots angebracht werden.
Wenn die Zeit es erlaubt, lassen Sie die Schüler die Rollen tauschen, um anderen die Möglichkeit zu geben, den Clawbot zu fahren. Sie könnten daraus sogar einen Wettbewerb innerhalb oder zwischen Gruppen machen, indem Sie sehen, wie schnell jeder Fahrer den Slalom bewältigen kann.

Slaloms sind Strecken, bei denen die Teilnehmer um aufgestellte Flaggen bzw. Markierungen herum navigieren müssen. Skislalom ist eine beliebte Wintersportart und Teil der Olympischen Winterspiele.
Nachdem der Controller nun gepaart und das Projekt heruntergeladenist, können Sie Ihren Clawbot mit dem Controller bewegen!
- Holen Sie vom Lehrer die vier Klassengegenstände ab, die Sie als Flaggen in Ihrem Slalom verwenden werden.
- Arbeiten Sie zusammen, um die Flaggen an Ort und Stelle zu setzen, damit der Fahrer den Clawbot gemäß dem Slalomdiagramm navigieren kann.
- Laden Sie das Beispielprojekt „Tank Drive“ herunter. Wenn Sie Fragen zum Herunterladen eines Projekts haben, sehen Sie sich das Tutorial „Herunterladen und Ausführen eines Projekts“ an.
![]() Diskussion anregen
-
Über die Aktivität nachdenken
Diskussion anregen
-
Über die Aktivität nachdenken
F: Hat der Clawbot wie erwartet auf den Controller reagiert?
A: Die Antworten können unterschiedlich ausfallen; das Ziel dieser Frage ist jedoch, kognitives Denken zu fördern. Die Schüler begannen damit, Verhaltensweisen vorherzusagen, bevor sie diese testeten, ihre Ergebnisse dokumentierten und reflektierten.
F: Was ist die größte Herausforderung beim geraden Vorwärts- oder Rückwärtsbewegen des Clawbots?
A: Die Antworten können zwar unterschiedlich ausfallen, eine gemeinsame Aussage sollte jedoch sein, dass sich beide Joysticks synchron bewegen müssen, um sicherzustellen, dass sich die Motoren des Clawbots in die gleiche Richtung und mit der gleichen Geschwindigkeit bewegen.
F: Wie ermöglicht Ihnen die Verwendung der Schleife [forever] , den Controller kontinuierlich zum Bewegen des Clawbots zu verwenden?
A: Ohne die Schleife forever würde der Clawbot die durch die Blöcke im Projekt festgelegten Verhaltensweisen nur einmal ausführen. Die Forever -Schleife weist den Clawbot an, die Geschwindigkeit ständig zu aktualisieren und für die Dauer des Projekts zu laufen. Mit anderen Worten: Mit der für immer -Schleife können Sie den Controller verwenden, um den Clawbot unbegrenzt oder bis die Batterie leer ist zu bewegen.
Schritt 4: Robo-Slalom
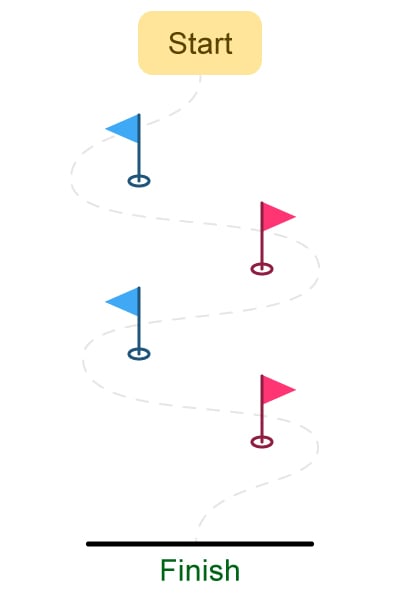
Bewegen Sie Ihren Clawbot mit dem Controller an der Außenseite jeder „Flagge“ entlang. Der Weg des Roboters muss so verlaufen, dass er keine Flagge berührt, und er muss die Ziellinie überqueren können.
- Führen Sie das Projekt aus und fahren Sie den Clawbot mit beiden Joysticks vorwärts und rückwärts und drehen Sie ihn nach links und rechts.
- Stoppen Sie die Zeit, die der Clawbot braucht, um den Kurs zu absolvieren. Dokumentieren Sie die Zeiten im Technikbuch.
- Wie schnell schaffen Sie es, Clawbot durch den Slalomparcours zu bringen?