
Bộ điều khiển: Khám phá Tank Drive - Dựa trên khối
![]() Hộp công cụ giáo viên
-
Mục đích của hoạt động này
Hộp công cụ giáo viên
-
Mục đích của hoạt động này
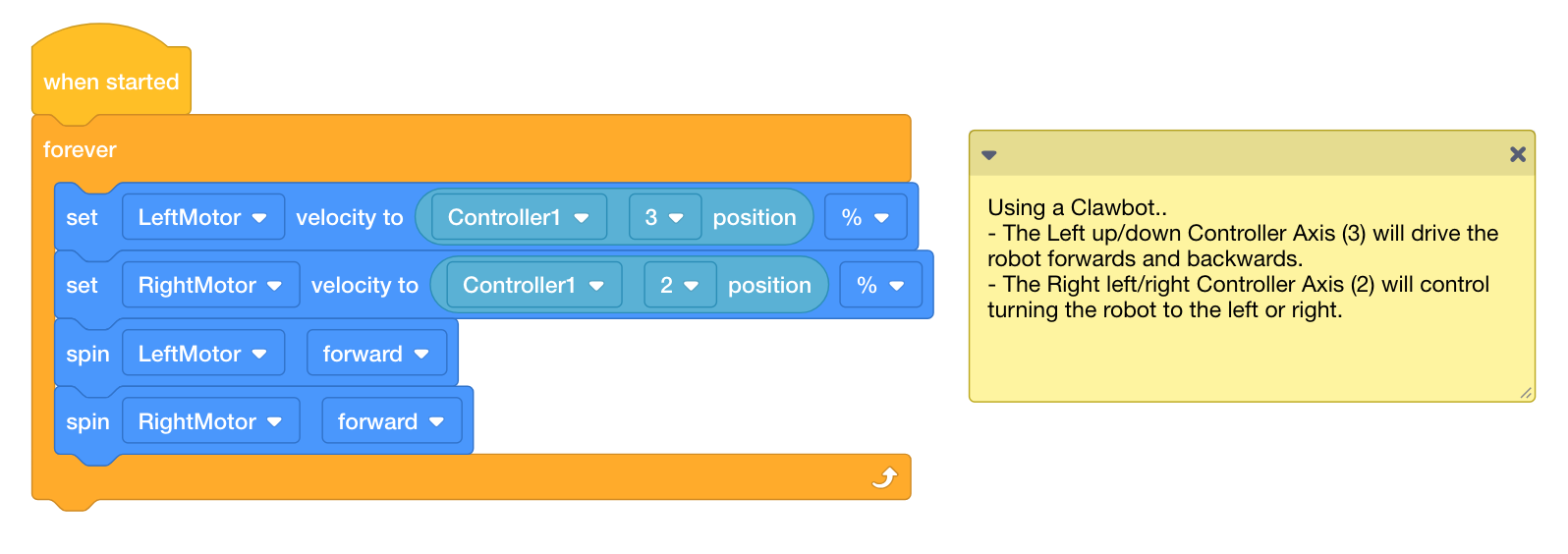
Sử dụng dự án ví dụ Tank Drive cho phép học sinh điều khiển Clawbot bằng Bộ điều khiển. Học sinh sẽ cần điều chỉnh các thông số trong các khối [đặt tốc độ động cơ], [quay] và (vị trí của bộ điều khiển) để kiểm soát tốc độ cho từng động cơ của Clawbot và cho phép Bộ điều khiển kiểm soát các chức năng của động cơ.
Để biết thêm thông tin về bất kỳ khối nào, hãy truy cập thông tin trợ giúptrong VEXcode V5.
Sau đây là phác thảo những gì học sinh sẽ làm trong hoạt động này:
-
Xem video hướng dẫn Sử dụng vòng lặp.
-
Khám phá dự án ví dụ về Tank Drive.
-
Hiểu cách sử dụng khối [mãi mãi].
-
Hoàn thành thử thách Robo-Slalom!
![]() Mẹo dành cho giáo viên
Mẹo dành cho giáo viên
Nếu đây là lần đầu tiên học viên sử dụng VEXcode V5, họ cũng có thể xem Hướng dẫn trên thanh công cụ để học các kỹ năng cơ bản khác.
| Số lượng | Vật liệu cần thiết |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit (với firmware cập nhật) |
| 1 |
VEXcode V5 (phiên bản mới nhất, Windows, macOS, Chromebook) |
| 1 |
Sổ tay kỹ thuật |
| 1 |
Sử dụng vòng lặp (Hướng dẫn) |
| 1 |
DỰ ÁN VÍ DỤ về Ổ đĩa |
| 2 trở lên |
Các vật dụng trong lớp học được sử dụng làm chướng ngại vật |
Hoạt động này sẽ cung cấp cho bạn các công cụ để lập trình Người kiểm soát của bạn.
Bạn có thể sử dụng thông tin Trợ giúp bên trong VEXcode V5 để tìm hiểu về các khối. Để được hướng dẫn sử dụng tính năng Trợ giúp, hãy xem hướng dẫn Sử dụng Trợ giúp.

Bước 1: Hãy bắt đầu lập trình Bộ điều khiển.
- Bắt đầu bằng cách xem video hướng dẫn Sử dụng vòng lặp.
-
Mở dự án ví dụ Tank Drive.
Thực hiện các thao tác sau trong sổ tay kỹ thuật của bạn:
Dự đoán những gì Clawbot sẽ thực hiện trong dự án. Giải thích thêm về việc dự án sử dụng Bộ điều khiển.
Cần điều khiển di chuyển robot như thế nào? Clawbot đang làm gì?
![]() Hộp công cụ giáo viên
-
Câu trả lời
Hộp công cụ giáo viên
-
Câu trả lời
Dự án này sẽ sử dụng khối [forever] để liên tục kiểm tra vị trí của cần điều khiển bên trái và bên phải. Khi cần điều khiển bên trái (hoặc bên phải) được đẩy lên, tốc độ sẽ được thiết lập theo mức độ cần điều khiển được đẩy về phía trước. Vì vậy, cần điều khiển được đẩy càng xa về phía trước thì tốc độ sẽ được thiết lập càng nhanh và động cơ sẽ di chuyển càng nhanh. Ý tưởng tương tự cũng có tác dụng khi đẩy cần điều khiển xuống. Càng đẩy cần điều khiển xuống xa thì động cơ sẽ di chuyển ngược lại càng nhanh.

![]() Hộp công cụ giáo viên
-
[Mãi mãi] khối
Hộp công cụ giáo viên
-
[Mãi mãi] khối
Bước này thảo luận về tầm quan trọng của khối [mãi mãi]. Bạn nên xem lại thông tin này như một lớp học. Bạn có thể mô hình hóa hành vi bằng Clawbot và Bộ điều khiển hoặc nếu có thời gian, hãy để học sinh chạy chương trình mà không có khối [mãi mãi].
Lợi ích của việc sử dụng khối [forever] là gì?
Đây là dự án của chúng tôi mà không có khối [forever]:
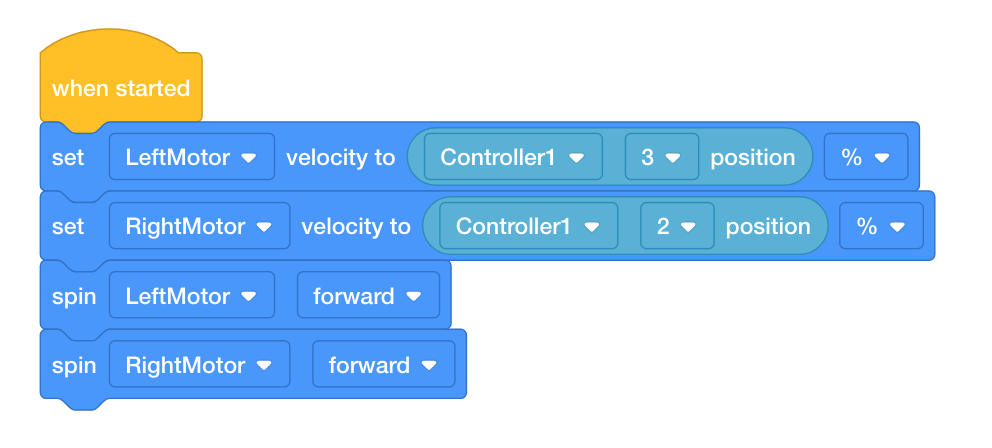
Bạn nghĩ điều gì sẽ xảy ra nếu chương trình này được chạy? Thảo luận theo nhóm. Viết ra dự đoán của bạn trong sổ ghi chép kỹ thuật.
![]() Hộp công cụ giáo viên
-
Hiểu về khối
Hộp công cụ giáo viên
-
Hiểu về khối
Nếu không có vòng lặp [mãi mãi], giá trị vận tốc cho mỗi động cơ sẽ được thiết lập ngay khi dự án được chạy và giá trị đó vẫn không đổi cho đến khi dự án dừng lại. Nói cách khác, nếu bạn chạy dự án mà không di chuyển bất kỳ Cần điều khiển nào, vì vị trí mặc định của Cần điều khiển trên trục là 0, nên tốc độ của cả hai động cơ sẽ vẫn ở mức 0, ngay cả khi bạn di chuyển Cần điều khiển.
Tương tự như vậy, giả sử bạn di chuyển cần điều khiển bên trái lên cao nhất có thể dọc theo vị trí 3 và giữ nguyên ở đó. Nếu bạn chạy dự án ở trên, động cơ bên trái sẽ di chuyển với tốc độ tối đa và duy trì ở tốc độ đó ngay cả khi bạn di chuyển cần điều khiển xuống vị trí 3. Điều này là do Clawbot nhận được lệnh ban đầu từ Bộ điều khiển ngay khi dự án được chạy; tuy nhiên, nếu không có Vòng lặp, giá trị ban đầu đó không thể cập nhật.
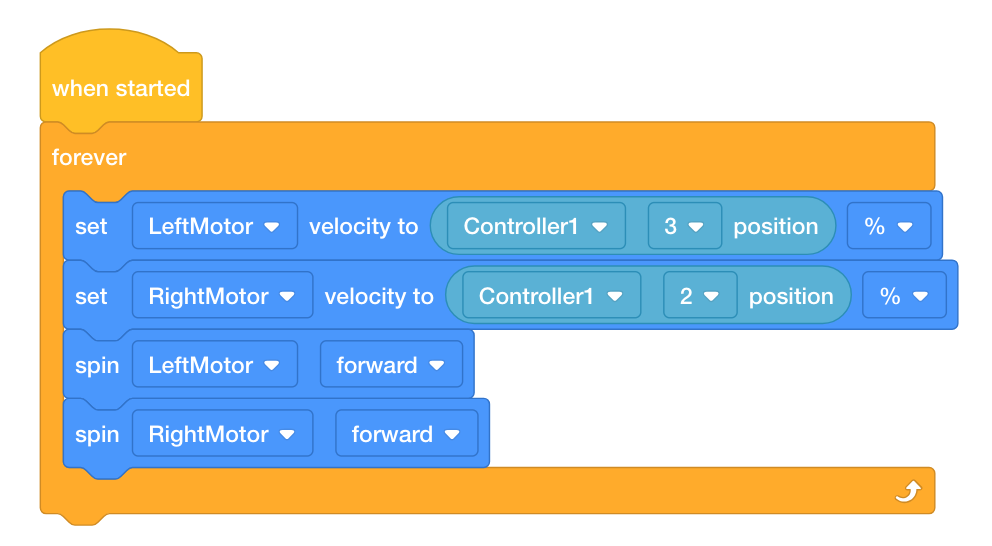
Vòng lặp [mãi mãi] yêu cầu Clawbot liên tục cập nhật tốc độ và chạy trong suốt thời gian của dự án. Nói cách khác, vòng lặp [mãi mãi] trong dự án này cho phép bạn thay đổi vận tốc của từng động cơ bằng cách di chuyển cần điều khiển dọc theo vị trí 2 hoặc 3 và Clawbot sẽ phản hồi tương ứng cho đến khi bạn dừng dự án hoặc tắt Clawbot.
Bước 3: Điều hướng một khóa học Slalom!
![]() Hộp công cụ giáo viên
-
Thiết lập hoạt động
Hộp công cụ giáo viên
-
Thiết lập hoạt động
Chia học sinh thành các nhóm nhỏ gồm 2 hoặc 4 học sinh. Cần chỉ định một học sinh làm Người lái - người sẽ sử dụng Bộ điều khiển để điều khiển Clawbot.
Yêu cầu học sinh hoàn thành bài tập này bằng cách sử dụng Bộ điều khiển để di chuyển Clawbot dọc theo bên ngoài của mỗi "lá cờ". Đường đi của Clawbot phải ngăn không cho nó chạm vào bất kỳ lá cờ nào và cho phép nó vượt qua vạch đích. Cờ có thể là bất kỳ vật dụng/đồ vật nào trong lớp học mà bạn có sẵn (tẩy, cuộn băng dính, hộp khăn giấy) và có thể được đặt đúng vị trí trước khi vận hành Clawbot.
Nếu thời gian cho phép, hãy để học sinh đổi vai để những người khác có cơ hội lái Clawbot. Bạn thậm chí có thể biến điều này thành một cuộc thi trong nhóm hoặc giữa các nhóm bằng cách xem mỗi tay đua có thể điều khiển xe đua slalom nhanh như thế nào.

Slaloms là các khóa học mà người tham gia phải điều hướng xung quanh các cờ đã đặt hoặc điểm đánh dấu. Trượt tuyết dốc là một môn thể thao mùa đông phổ biến và được đưa vào Thế vận hội mùa đông.
Bây giờ Bộ điều khiểnđã được ghép nốivà dự án đã được tải xuống, bạn đã sẵn sàng di chuyển Clawbot của mình bằng Bộ điều khiển!
- Thu thập bốn vật dụng trong lớp học mà bạn sẽ sử dụng làm cờ trong slalom của bạn từ giáo viên.
- Phối hợp để đặt cờ tại chỗ cho Trình điều khiển để điều hướng Clawbot xung quanh, theo sơ đồ slalom.
- Tải xuống dự án Ví dụ về Ổ đĩa Xe tăng. Nếu có bất kỳ câu hỏi nào về cách tải xuống dự án, hãy xem hướng dẫn Tải xuống và chạy dự án.
![]() Thảo luận thúc đẩy
-
Suy ngẫm về hoạt động
Thảo luận thúc đẩy
-
Suy ngẫm về hoạt động
H:Clawbot có phản hồi Bộ điều khiển như bạn mong đợi không?
Đ:Câu trả lời có thể khác nhau; tuy nhiên, mục tiêu của câu hỏi này là thúc đẩy tư duy nhận thức. Học sinh bắt đầu bằng cách dự đoán hành vi trước khi kiểm tra, ghi lại kết quả và suy ngẫm.
H:Thách thức lớn nhất khi di chuyển Clawbot tiến hoặc lùi theo đường thẳng là gì?
Đ:Mặc dù câu trả lời có thể khác nhau, nhưng câu trả lời chung là cả hai cần điều khiển phải di chuyển đồng bộ với nhau để đảm bảo động cơ của Clawbot di chuyển cùng hướng và cùng vận tốc.
Q:Làm thế nào để sử dụng vòng lặp [forever] cho phép bạn liên tục sử dụng Bộ điều khiển để di chuyển Clawbot?
A:Nếu không có vòng lặp forever, Clawbot sẽ chỉ thực hiện các hành vi được xác định bởi các khối trong dự án một lần. Vòng lặp mãi mãi yêu cầu Clawbot liên tục cập nhật tốc độ và chạy trong suốt thời gian của dự án. Nói cách khác, vòng lặp mãi mãi cho phép bạn sử dụng Bộ điều khiển để di chuyển Clawbot vô thời hạn hoặc cho đến khi hết pin.
Bước 4: Robo-Slalom

Sử dụng Bộ điều khiển để di chuyển Clawbot của bạn dọc theo bên ngoài mỗi "cờ". Đường đi của robot phải ngăn không cho nó chạm vào bất kỳ cờ nào và cho phép nó vượt qua vạch đích.
- Chạy dự án và lái Clawbot về phía trước và ngược lại, và rẽ trái và phải bằng cả hai Cần điều khiển.
- Thời gian để Clawbot hoàn thành khóa học. Ghi lại thời gian vào sổ ghi chép kỹ thuật.
- Bạn có thể đưa Clawbot vượt qua khóa học Slalom nhanh như thế nào?