
বেগ অন্বেষণ - পাইথন
![]() শিক্ষক টুলবক্স
শিক্ষক টুলবক্স
-
কার্যকলাপের রূপরেখা
এই অন্বেষণে প্রথমে শিক্ষার্থীদের গাড়ি চালানোর জন্য বেগ নির্ধারণের সাথে পরিচয় করিয়ে দেওয়া হবে এবং তারপর তাদের রোবটের বেগ কীভাবে এর ভরবেগকে প্রভাবিত করে তা অন্বেষণ করতে বলা হবে। এই কার্যকলাপের রূপরেখার জন্য এখানে (Google / .docx / .pdf) ক্লিক করুন। স্ট্রাইক চ্যালেঞ্জ বোলিং গেমে প্রয়োগ করার জন্য রোবটের গতি বোঝা একটি গুরুত্বপূর্ণ ধারণা হবে। -
শিক্ষার্থীরা কী প্রোগ্রাম করবে
স্পিডবট (ড্রাইভট্রেন ২-মোটর, গাইরো নেই) টেমপ্লেট প্রকল্প ব্যবহার করে শিক্ষার্থীরাড্রাইভ_ফর নির্দেশনায়সেট_ড্রাইভ_ভেলোসিটিযোগ করে স্পিডবটের বেগ সেটিংস পরিবর্তন করতে পারে। কার্যকলাপের নির্দেশিত অংশে শিক্ষার্থীরা বিভিন্ন বেগে স্পিডবটটি নাড়াচাড়া করে এবং কার্যকলাপের শেষে তাদের প্রোগ্রামিং বেগের দক্ষতা ভরবেগ এবং শক্তি স্থানান্তর পরীক্ষায় প্রয়োগ করতে বলা হয়।
Speedbot বিভিন্ন গতিতে গাড়ি চালানোর জন্য প্রস্তুত!
এই তদন্তটি আপনাকে কাজের জন্য সবচেয়ে উপযুক্ত গতিতে গাড়ি চালানোর জন্য স্পিডবোট প্রোগ্রামিং সম্পর্কে আরও জানতে সাহায্য করবে । শেষে স্ট্রাইক চ্যালেঞ্জে, আপনাকে স্পিডবটের জন্য একটি গতি খুঁজে বের করতে হবে যা এটিকে দ্রুত এবং দুর্দান্ত গতিশীল হতে দেয় তবে একটি ভাল কোণে এবং দুর্দান্ত শক্তি দিয়ে বলটি আঘাত করার জন্য নিয়ন্ত্রণে থাকে ।
![]() শিক্ষক টুলবক্স
শিক্ষক টুলবক্স
এখানে VEXcode V5 এর ইউজার ইন্টারফেসের একটি সারসংক্ষেপ দেওয়া হল। এই মোমেন্টাম অ্যালি স্টেম ল্যাবের কার্যকলাপের সময় শিক্ষার্থীদের এই ট্যাব/বোতামগুলির সাথে পরিচয় করিয়ে দেওয়া হবে। এই ট্যাব/বোতামগুলি সম্পর্কে আরও তথ্য প্রদানের জন্য STEM ল্যাব জুড়ে লিঙ্কগুলিও সরবরাহ করা হয়েছে। 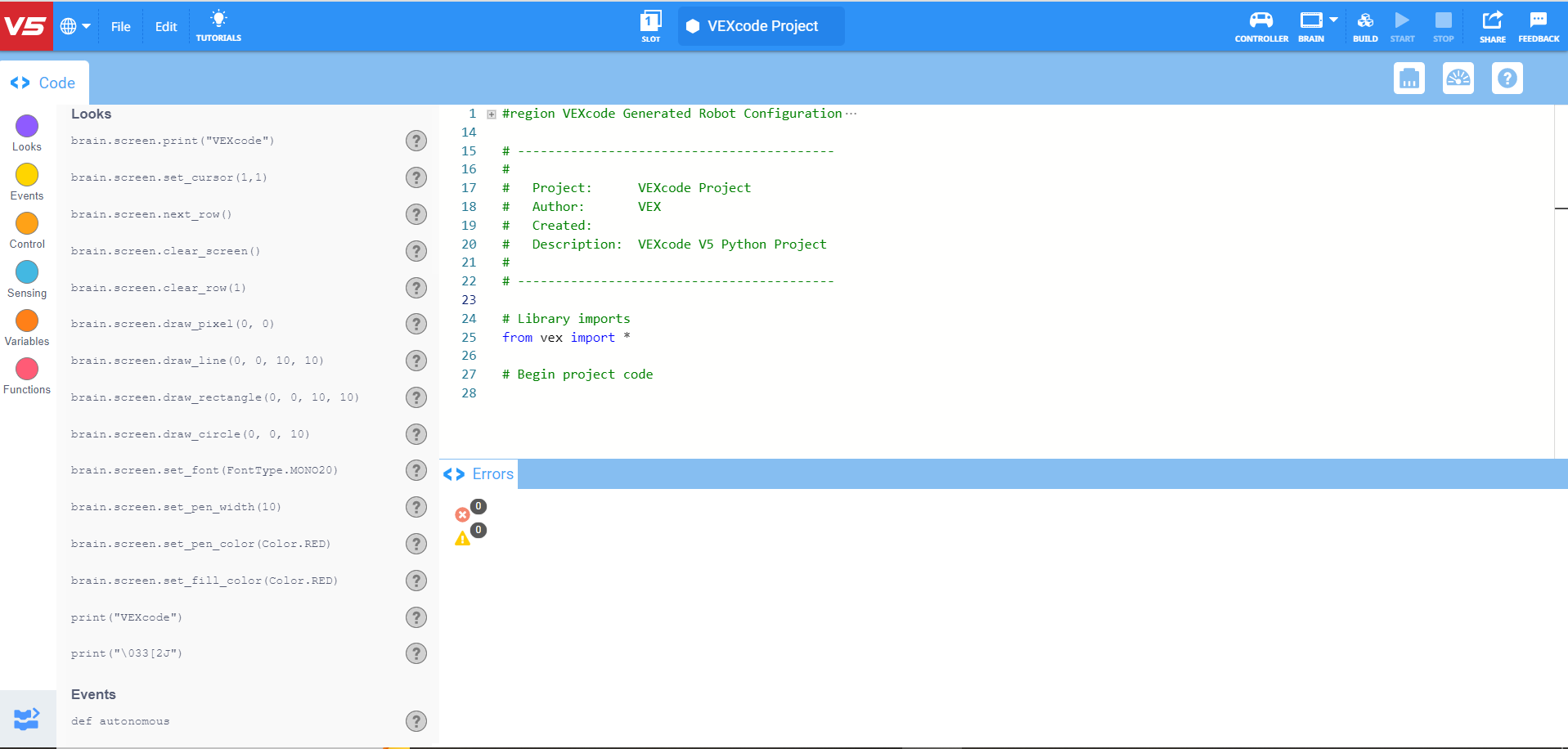
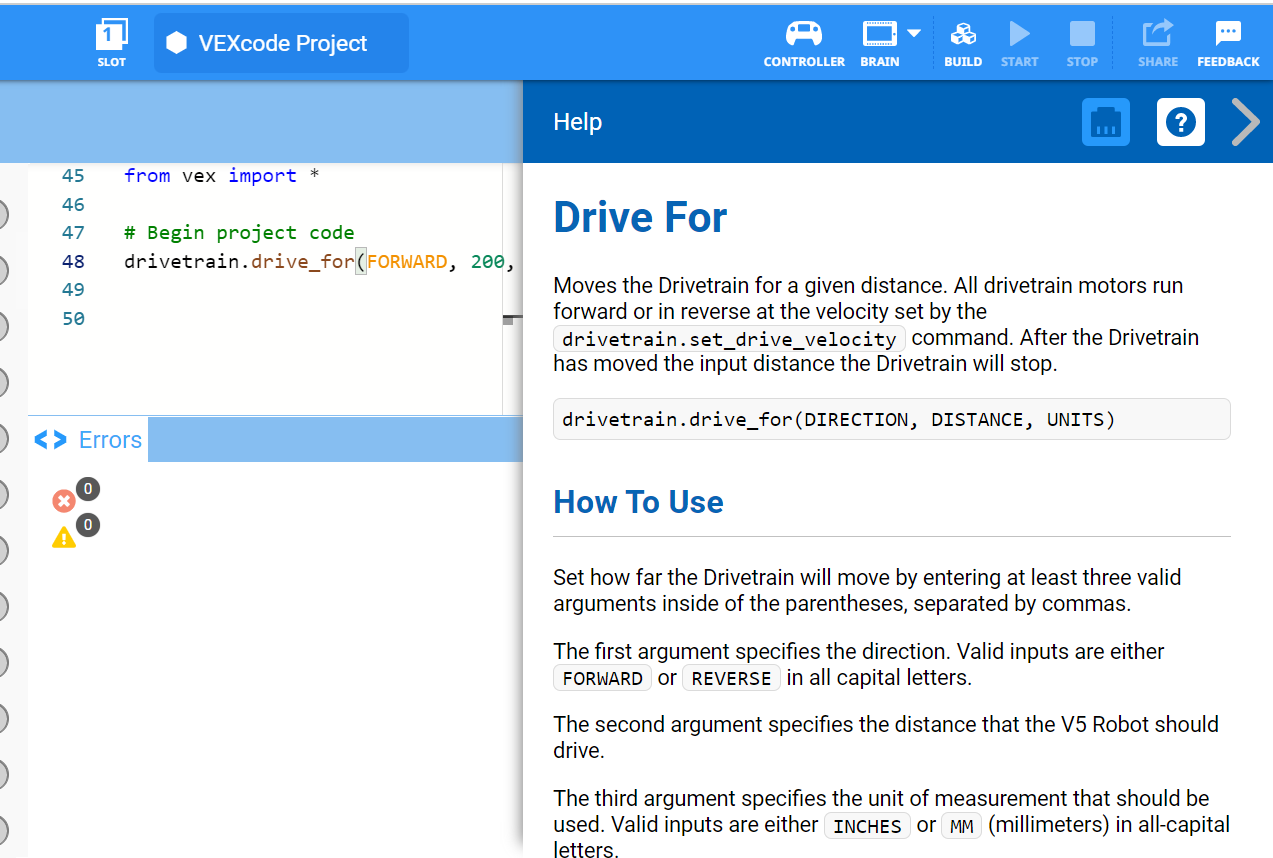
VEXcode V5 পাইথন নির্দেশাবলী যা এই তদন্তের প্রথম অংশে ব্যবহার করা হবে:
- drivetrain.set_drive_velocity(50, শতাংশ)
- drivetrain.drive_for(ফরোয়ার্ড, 200, এমএম)
-
একটি নির্দেশনা সম্পর্কে আরও তথ্য জানতে, সহায়তা নির্বাচন করুন এবং তারপরে আরও তথ্য দেখতে একটি নির্দেশের পাশে প্রশ্ন চিহ্ন আইকনটি নির্বাচন করুন ।
নিশ্চিত করুন যে আপনার প্রয়োজনীয় হার্ডওয়্যার, আপনার ইঞ্জিনিয়ারিং নোটবুক এবং VEXcode V5 ডাউনলোড এবং প্রস্তুত আছে।
![]() শিক্ষকদের টিপস
শিক্ষকদের টিপস
যদি শিক্ষার্থীরা প্রথমবারের মতো VEXcode V5 ব্যবহার করে, তাহলে তারা এই অন্বেষণের সময় যেকোনো সময় টিউটোরিয়ালগুলি উল্লেখ করতে পারে। টিউটোরিয়ালগুলি টুলবারে অবস্থিত। 
শিক্ষার্থীদের প্রতিটি দলের প্রয়োজনীয় হার্ডওয়্যার এবং গ্রুপের ইঞ্জিনিয়ারিং নোটবুক পাওয়া উচিত । তারপর VEXcode V5 খুলুন ।
| পরিমাণ | প্রয়োজনীয় উপকরণ |
|---|---|
| 1 |
স্পিডবোট রোবট |
| 1 |
চার্জ করা রোবট ব্যাটারি |
| 1 |
VEXcode V5 |
| 1 |
ইউএসবি কেবল (যদি কম্পিউটার ব্যবহার করেন) |
| 1 |
ইঞ্জিনিয়ারিং নোটবুক |
| 1 |
বল (একটি ফুটবল বলের আকার এবং আকৃতি) |
| 1 |
3m x 3m ক্লিয়ার স্পেস |
| 1 |
মিটার স্টিক বা রুলার |
| 1 |
রোল অফ টেপ |
| 1 |
![]() শিক্ষকদের টিপস
শিক্ষকদের টিপস
শিক্ষার্থীদের জন্য প্রতিটি সমস্যা সমাধানের ধাপ মডেল করুন।
ধাপ 2: একটি নতুন প্রকল্প শুরু করুন
প্রকল্পটি শুরু করতে নিম্নলিখিত ধাপগুলি সম্পূর্ণ করুন:
-
ফাইল মেনু খুলুন এবং ওপেন উদাহরণ নির্বাচন করুন ।

-
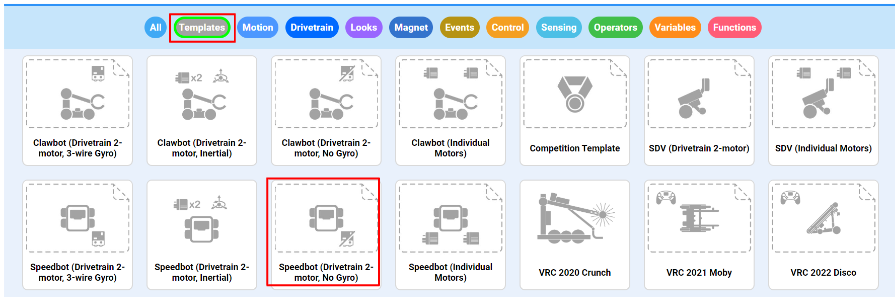
Speedbot (Drivetrain 2-motor, No Gyro) টেমপ্লেট প্রকল্প নির্বাচন করুন এবং খুলুন । টেমপ্লেট প্রকল্পটিতে স্পিডবটেরমোটর কনফিগারেশনরয়েছে। যদি টেমপ্লেটটি ব্যবহার না করা হয়, তাহলে আপনার রোবট প্রকল্পটি সঠিকভাবে চালাবে না ।
-
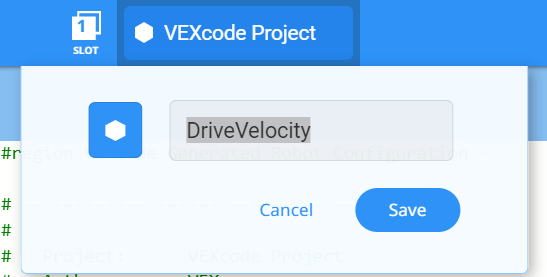
যেহেতু আপনি বেগ অন্বেষণের উপর কাজ করবেন, তাই আপনি আপনার প্রকল্পের নাম দেবেনDriveVelocity। সম্পন্ন হলে,নির্বাচন করুন সংরক্ষণ করুন।
![]() শিক্ষকদের টিপস
শিক্ষকদের টিপস
-
প্রকল্পের নামগুলিতে শব্দের মধ্যে বা পরে ফাঁকা স্থান থাকতে পারে।

- আপনি শিক্ষার্থীদের প্রকল্পের নামের সাথে তাদের নামের আদ্যক্ষর অথবা তাদের দলের নাম যোগ করতে বলতে পারেন। আপনি যদি শিক্ষার্থীদের প্রকল্পগুলি জমা দিতে বলেন, তাহলে এটি প্রকল্পগুলিকে আলাদা করতে সাহায্য করবে।
- যেহেতু এটি আপনার শিক্ষার্থীরা প্রোগ্রামিং-এর প্রথম অ্যাক্টিভিটি চেষ্টা করতে পারে, তাই আপনার পদক্ষেপগুলি মডেল করা উচিত এবং তারপরে শিক্ষার্থীদের একই অ্যাক্টিভিটিগুলি সম্পূর্ণ করতে বলা উচিত। এরপর শিক্ষকের উচিত শিক্ষার্থীদের উপর নজর রাখা যাতে তারা সঠিকভাবে পদক্ষেপগুলি অনুসরণ করছে কিনা তা নিশ্চিত করা যায়।
- নিশ্চিত করুন যে শিক্ষার্থীরা ফাইল মেনু থেকে "Open Examples" নির্বাচন করেছে।
- নিশ্চিত করুন যে শিক্ষার্থীরা স্পিডবট (ড্রাইভট্রেন ২-মোটর, নো গাইরো) টেমপ্লেট প্রকল্পটি নির্বাচন করেছে।
- আপনি শিক্ষার্থীদের বলতে পারেন যে উদাহরণ পৃষ্ঠা থেকে বেছে নেওয়ার জন্য বেশ কয়েকটি বিকল্প রয়েছে। তারা যখন অন্যান্য রোবট তৈরি এবং ব্যবহার করবে, তখন তারা বিভিন্ন টেমপ্লেট ব্যবহার করার সুযোগ পাবে।
- টুলবারের মাঝখানে উইন্ডোতে প্রোজেক্টের নাম DriveVelocityআছে কিনা তা পরীক্ষা করে দেখুন।

![]() শিক্ষক টুলবক্স
-
সংরক্ষণ প্রকল্প
শিক্ষক টুলবক্স
-
সংরক্ষণ প্রকল্প
-
উল্লেখ করুন যে যখন তারা প্রথম VEXcode V5 খোলে, তখন উইন্ডোটির নাম ছিল VEXcode Project। VEXcode V5 প্রথম খোলার সময় VEXcode Project হল ডিফল্ট প্রোজেক্টের নাম। একবার প্রকল্পটির নাম পরিবর্তন করে ড্রাইভ রাখা হলে এবং সংরক্ষণ করা হলে, নতুন প্রকল্পের নাম দেখানোর জন্য ডিসপ্লেটি আপডেট করা হয়েছিল। টুলবারের এই উইন্ডোটি ব্যবহার করে, শিক্ষার্থীরা সঠিক প্রকল্পটি ব্যবহার করছে কিনা তা পরীক্ষা করা সহজ।
-
শিক্ষার্থীদের বলুন যে তারা এখন তাদের প্রথম প্রকল্প শুরু করার জন্য প্রস্তুত। শিক্ষার্থীদের বুঝিয়ে বলুন যে কয়েকটি সহজ ধাপ অনুসরণ করে তারা এমন একটি প্রকল্প তৈরি এবং চালাতে সক্ষম হবে যা স্পিডবটকে এগিয়ে নিয়ে যাবে।
-
শিক্ষার্থীদের মনে করিয়ে দিন যে তারা কাজ করার সময় তাদের প্রকল্পগুলি সংরক্ষণ করে রাখে। VEX লাইব্রেরির Pythonঅংশে VEXcode V5-এ সংরক্ষণ পদ্ধতি ব্যাখ্যা করা হয়েছে।
![]() শিক্ষক টুলবক্স
-
থামুন এবং আলোচনা করুন
শিক্ষক টুলবক্স
-
থামুন এবং আলোচনা করুন
VEXcode V5-এ একটি নতুন প্রকল্প শুরু করার জন্য শিক্ষার্থীদের এককভাবে বা দলগতভাবে সম্পন্ন পদক্ষেপগুলি পর্যালোচনা করার জন্য এটি একটি ভাল বিষয়। শিক্ষার্থীদের তাদের দলের মধ্যে বা পুরো ক্লাসে ভাগ করে নেওয়ার আগে পৃথকভাবে চিন্তা করতে বলুন।
ধাপ 3: বিভিন্ন বেগে 150 মিমি পর্যন্ত এগিয়ে যান
তুমি রোবটটিকে বিভিন্ন বেগে এগিয়ে নিয়ে যাওয়ার জন্য প্রোগ্রামিং শুরু করার জন্য প্রস্তুত নও!
- প্রোগ্রামিং শুরু করার আগে, আমাদের একটি নির্দেশনা কী তা বুঝতে হবে । একটি নির্দেশের তিনটি অংশ রয়েছে ।
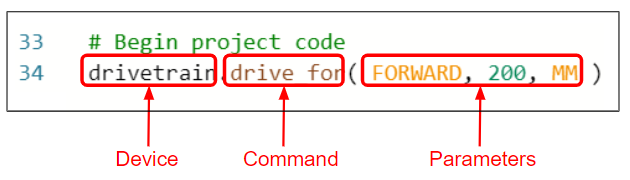
-
প্রকল্পে নির্দেশাবলী যোগ করুন, যাতে আপনার প্রকল্পটি দেখতে এরকম হয়:
# VEX আমদানি থেকে লাইব্রেরি আমদানি * # প্রজেক্ট কোড drivetrain.drive_for (ফরোয়ার্ড, 150, এমএম) drivetrain.set_drive_velocity (25, শতাংশ) drivetrain.drive_for (ফরোয়ার্ড, 150, এমএম) drivetrain.set_drive_velocity (75, শতাংশ) drivetrain.drive_for (ফরওয়ার্ড, 150, এমএম)
![]() শিক্ষকদের টিপস
শিক্ষকদের টিপস
লক্ষ্য করুন যে দ্বিতীয় এবং তৃতীয় নির্দেশাবলী (উপরের ছবিতে লাইন 33 এবং 34) চতুর্থ এবং পঞ্চম নির্দেশাবলীর (উপরের লাইন 35 এবং 36) মতোই, তবে একটি ভিন্ন বেগ প্যারামিটার সহ। তৃতীয় নির্দেশাবলী যোগ করার পর, শিক্ষার্থীরা পুনরাবৃত্তি করার জন্য লাইনগুলি হাইলাইট করতে পারে এবং প্রকল্পটি সম্পূর্ণ করার জন্য সেগুলি কপি এবং পেস্ট করতে পারে। এরপর তারা চতুর্থ লাইনের বেগ ৭৫ শতাংশে পরিবর্তন করতে পারে।
-
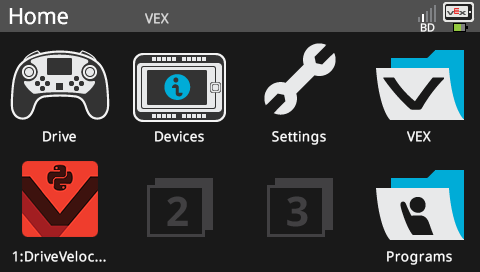
রোবট ব্রেইনের আটটি উপলভ্য স্লটের মধ্যে একটি বেছে নিতে স্লট আইকনটি নির্বাচন করুন এবং স্লট 1 নির্বাচন করুন ।

-
V5 Robot Brain-এ একটি মাইক্রো USB ক্যাবল এবং পাওয়ার ব্যবহার করে কম্পিউটারে V5 Robot Brain সংযুক্ত করুন । সফল সংযোগ তৈরি হয়ে গেলে টুলবারএর ব্রেন আইকনটি সবুজহয়ে যায়।

-
মস্তিষ্কে প্রকল্পটি ডাউনলোড করতেডাউনলোডনির্বাচন করুন।

![]() শিক্ষক টুলবক্স
শিক্ষক টুলবক্স
- শিক্ষার্থীদের রোবট ব্রেন থেকে USB কেবল সংযোগ বিচ্ছিন্ন করতে মনে করিয়ে দিন। কোনও প্রকল্প চালানোর সময় রোবটটিকে কম্পিউটারের সাথে সংযুক্ত রাখার ফলে রোবটটি সংযোগ কেবলটি টেনে ধরতে পারে।
-
রোবট ব্রেনের স্ক্রিন দেখে আপনার প্রোজেক্টটি (Python) ডাউনলোড হয়েছে কিনা তা পরীক্ষা করুন। প্রকল্পের নাম DriveVelocity স্লট 1 এ তালিকাভুক্ত করা উচিত ।
![]() শিক্ষক টুলবক্স
শিক্ষক টুলবক্স
-
থামুন এবং আলোচনা করুন
শিক্ষার্থীদের বলুন যে এই প্রকল্পটি ডাউনলোড করে স্পিডবট রোবটে চালানো হলে তারা কী ভাববে। শিক্ষার্থীদের তাদের ভবিষ্যদ্বাণীগুলি তাদের ইঞ্জিনিয়ারিং নোটবুকে লিপিবদ্ধ করতে বলুন। যদি সময় থাকে, তাহলে প্রতিটি দলকে তাদের ভবিষ্যদ্বাণী ভাগ করে নিতে বলুন।শিক্ষার্থীদের ভবিষ্যদ্বাণী করা উচিত যে স্পিডবট প্রথমে তার পূর্বনির্ধারিত বেগে (৫০%), তারপর পূর্বনির্ধারিত বেগের চেয়ে ধীর (২৫%) এবং তারপর পূর্বনির্ধারিত বেগের চেয়ে দ্রুত (৭৫%) এগিয়ে যাবে।
-
মডেল প্রথম
সকল শিক্ষার্থীকে একসাথে চেষ্টা করার আগে ক্লাসের সামনে প্রকল্পটি চালানো মডেল। শিক্ষার্থীদের একটি জায়গায় জড়ো করুন এবং স্পিডবটটি মেঝেতে রাখলে নড়াচড়া করার জন্য পর্যাপ্ত জায়গা রাখুন।শিক্ষার্থীদের বলুন এখন তাদের প্রকল্পটি চালানোর পালা। নিশ্চিত করুন যে তাদের একটি পরিষ্কার পথ আছে এবং কোনও স্পিডবট যেন একে অপরের সাথে ধাক্কা না খায়।
-
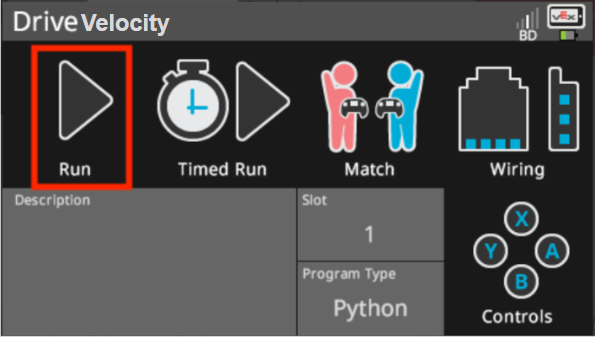
রোবটে প্রজেক্টটি (Python) চালান, নিশ্চিত করুন যে প্রজেক্টটি নির্বাচিত হয়েছে এবং তারপর রোবট ব্রেনেররানবোতাম টিপুন। আপনার প্রথম প্রকল্প তৈরির জন্য অভিনন্দন!
ধাপ ৪: বিভিন্ন বেগে ১৫০ মিমি সামনের দিকে এবং বিপরীত দিকে গাড়ি চালান
এখন আপনি আপনার রোবটকে বিভিন্ন গতিতে এগিয়ে যাওয়ার জন্য প্রোগ্রাম করেছেন, এটি এখন বিভিন্ন গতিতে এগিয়ে এবং বিপরীত দিকে চালানোর জন্য প্রোগ্রাম করুন ।
-
দ্বিতীয়drive_forনির্দেশের প্যারামিটারটি REVERSE, এ পরিবর্তন করুন যাতে আপনার প্রকল্পটি এইরকম দেখায়:
# VEX আমদানি থেকে লাইব্রেরি আমদানি * # প্রজেক্ট কোড drivetrain.drive_for (ফরোয়ার্ড, 150, এমএম) drivetrain.set_drive_velocity (25, শতাংশ) drivetrain.drive_for (বিপরীত, 150, এমএম) drivetrain.set_drive_velocity (75, শতাংশ) drivetrain.drive_for (ফরওয়ার্ড, 150, এমএম) -
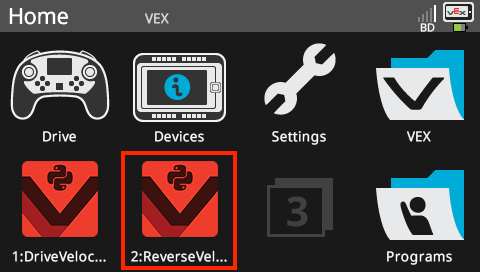
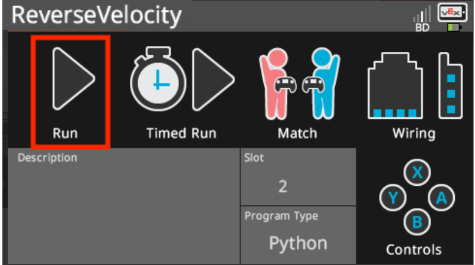
DriveVelocity থেকে ReverseVelocity-তে পরিবর্তন করতে প্রকল্পের নাম নির্বাচন করুন ।

-
একটি নতুন স্লট বেছে নিতে স্লট আইকনটি নির্বাচন করুন । স্লট নির্বাচন করুন ২.

-
প্রকল্পটি ডাউনলোড করুন (পাইথন)।

-
রোবট ব্রেনের স্ক্রিন দেখে আপনার প্রোজেক্টটি (Python) ডাউনলোড হয়েছে কিনা তা পরীক্ষা করুন। প্রকল্পের নাম ReverseVelocity স্লট 2 এ তালিকাভুক্ত করা উচিত ।
-
রোবটে প্রজেক্টটি (Python) চালান, নিশ্চিত করুন যে প্রজেক্টটি নির্বাচিত হয়েছে এবং তারপর রোবট ব্রেনেররানবোতাম টিপুন।
![]() শিক্ষক টুলবক্স
-
ধাপ ৪ সমাপ্তি
শিক্ষক টুলবক্স
-
ধাপ ৪ সমাপ্তি
-
drive_forকমান্ডটিforwardথেকেreverseএ পরিবর্তন করতে, কেবল প্রথম প্যারামিটারটি REVERSE এ পরিবর্তন করুন। এর ফলে ড্রাইভট্রেনের মোটরগুলি বিপরীত দিকে চলে যাবে।
-
মিমি সংখ্যা পরিবর্তন করা যেতে পারে, তবে এই উদাহরণের জন্য আমরা পূর্ববর্তী ধাপে সেট করা 150 মিমিতে রেখে দেব।
-
প্রকল্পটি চালানোর আগে শিক্ষার্থীদের রোবট ব্রেন থেকে USB কেবলটি সংযোগ বিচ্ছিন্ন করতে মনে করিয়ে দিন।
-
শিক্ষার্থীদের মনে করিয়ে দিন যে তারা কাজ করার সময় তাদের প্রকল্পগুলি সংরক্ষণ করে রাখে। VEX লাইব্রেরিতেPythonজন্য একটি বিভাগ রয়েছে যা VEXcode V5-এ সংরক্ষণ পদ্ধতিগুলি ব্যাখ্যা করে।
![]() শিক্ষকদের টিপস
শিক্ষকদের টিপস
প্রয়োজনে দলগুলিকে পরীক্ষার জায়গা এবং বল ভাগ করে নিতে বলুন, তবে প্রতিটি দলকে তাদের নিজস্ব বল সহ একাধিক পরীক্ষার জায়গাও স্থাপন করা যেতে পারে। আপনি পরীক্ষার ক্ষেত্র(গুলি) সেট আপ করতে চান কিনা, নাকি আপনি চান যে শিক্ষার্থীরা তা করুক, তা নির্ধারণ করুন।
ধাপ ৫: আপনার টেস্টিং এরিয়া সেট আপ করা
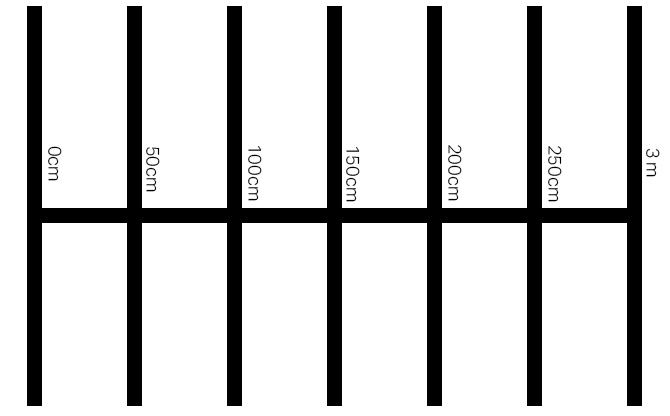
- উপরের ছবিতে দেখানো অনুভূমিক লাইনের মতো মেঝেতে একটি 3 মিটার লাইন তৈরি করতে টেপ এবং একটি মিটার স্টিক ব্যবহার করুন ।
- লাইনটি তৈরি হওয়ার পরে, উপরের চিত্রের উল্লম্ব লাইনের মতো 3 মিটার লাইন জুড়ে 1 মিটার লাইন তৈরি করতে টেপ এবং আপনার মিটার স্টিকটি আরও একবার ব্যবহার করুন । 0 সেন্টিমিটার থেকে শুরু করে উল্লম্ব লাইনের প্রতিটি 50 সেন্টিমিটার চিহ্নের একটি 1 মিটার লাইন টেপ করুন ।
- ছোট অনুভূমিক রেখাগুলি দীর্ঘ উল্লম্ব রেখার উপর কেন্দ্রীভূত হওয়া উচিত ।
- অঞ্চলটি সেট আপ করার সময়, আপনার দলের এক বা দুজন সদস্যের মোমেন্টাম নামে একটি নতুন প্রকল্প তৈরি করা উচিত । গতিবেগ 50% নির্ধারণ করুন এবং স্পিডবট ড্রাইভটি 50 সেন্টিমিটারে প্রথম লাইনে এগিয়ে রাখুন । মনে রাখবেন 1 সেমি = 10 মিমি, তাই রোবটটি 50 সেমি বা 500 মিলিমিটারের জন্য এগিয়ে যাবে ।
![]() শিক্ষক টুলবক্স
-
কেন এই কার্যকলাপ?
শিক্ষক টুলবক্স
-
কেন এই কার্যকলাপ?
-
তথ্য সংগ্রহ এবং বিশ্লেষণ, এমনকি সাধারণ প্যাটার্ন স্বীকৃতিও মৌলিক বিজ্ঞান দক্ষতা। এই কার্যকলাপটি সাধারণ ভুল রোধ করে সেই ডেটা বিশ্লেষণে কাঠামো যোগ করে।
-
লক্ষ্য করুন যে নির্দেশাবলীতে শিক্ষার্থীদের রোবটের গতি পরিবর্তনের সাথে সাথে রোবটের ড্রাইভিং দূরত্ব পরিবর্তন করতে বলা হয়নি। এটি শেখার বিজ্ঞানীরা যাকে "ভেরিয়েবল নিয়ন্ত্রণ কৌশল" বলে অভিহিত করেন তার একটি ইচ্ছাকৃত প্রয়োগ। নবীন তদন্তকারীদের একবারে একটি চলক (অর্থাৎ, এই ক্ষেত্রে বেগ) কীভাবে নিয়ন্ত্রণ করতে হয় তা শেখানো যাতে দ্বিতীয় চলকের উপর তার প্রভাব (অর্থাৎ, সংঘর্ষের পরে বলটি কত দূরত্ব অতিক্রম করে) নির্ধারণ করা যায়, কারণ এটি এমন একটি পদ্ধতি নয় যা শিক্ষার্থীরা অনুমান-পরীক্ষা পদ্ধতির চেয়ে স্বতঃস্ফূর্তভাবে গ্রহণ করবে। সাধারণ অনুমান-পরীক্ষা পদ্ধতিগুলি প্রায়শই একসাথে একাধিক চলককে কাজে লাগায় (অর্থাৎ, রোবটের বেগ এবং দূরত্ব উভয়ই পরিবর্তন করে) এবং ঘূর্ণনের পরে বলটি যে দূরত্ব অতিক্রম করে তার উপর সঙ্গমের প্রভাব পর্যবেক্ষণ করে। এই কার্যকলাপটি শিক্ষার্থীদের সেই বিষয় থেকে দূরে সরানোর চেষ্টা করে কারণ চলকগুলির মধ্যে সম্পর্কগুলি তখন অস্পষ্ট হয়ে পড়ে। রোবটের বেগ বেশি, রোবট যত বেশি দূরত্ব চালায়, নাকি বলটিকে আরও দূরে নিয়ে যায়, এই দুটোই কি তার কারণ? আমরা যখন একই সাথে উভয় চলককে কাজে লাগাই, তখন এর উত্তর দিতে পারি না।
-
তবে, দলগুলি স্বতঃস্ফূর্তভাবে রোবটটিকে বিভিন্ন দূরত্বে চালানোর চেষ্টা করতে পারে। যদি আপনি এটি লক্ষ্য করেন, তাহলে তাদের কেবল দূরত্ব পরিবর্তন করতে বলুন কিন্তু বেগটি মূল 500 মিমি দূরত্বের সাথে পরীক্ষামূলকভাবে যেমন ছিল তেমনই রাখুন। এইভাবে, তারা একই বেগকে বিভিন্ন ড্রাইভিং দূরত্বের সাথে তুলনা করতে পারে যাতে দেখা যায় যে রোবটের ড্রাইভিং দূরত্ব বলটি কতদূর ভ্রমণ করে তার উপরও প্রভাব ফেলে কিনা।
ধাপ ৬: সংঘর্ষের সময় শক্তির স্থানান্তর পরীক্ষা করা
 রোবট এবং বল দিয়ে
রোবট এবং বল দিয়ে রোবট এবং বল দিয়ে বোলিং চ্যালেঞ্জ টেস্ট এরিয়া
50 সেন্টিমিটারে অনুভূমিক লাইনে বলটি কেন্দ্র করুন এবং আপনার রোবটটি রাখুন যাতে এর সামনের অংশটি 0 সেন্টিমিটারে অনুভূমিক লাইনে কেন্দ্রীভূত হয় । নিশ্চিত করুন যে রোবটের সামনের দিকটি বলের দিকে মুখ করে আছে । আপনার প্রথম মোমেন্টাম প্রকল্পটি চালান যেখানে বেগ ৫০% সেট করা আছে এবং রোবটটি বলের সাথে সংঘর্ষের সময় মনোযোগ দিন।
এই ডেটা টেবিলে সেট বেগ, চালিত দূরত্ব এবং বলটি ভ্রমণ করা দূরত্ব রেকর্ড করুন (গুগল / .পিডিএফ)। পূর্ববর্তী ধাপে আপনি যে মোমেন্টাম প্রজেক্টে কাজ করেছেন তার উপর ভিত্তি করে আপনার জন্য টেবিলের প্রথম সারি শুরু করা হয়েছে । আপনি বিভিন্ন বেগ সেট করার চেষ্টা করার সাথে সাথে এই টেবিলে ডেটা যোগ করা চালিয়ে যান । তারপরে আপনি ক্লাস হিসাবে আপনার ফলাফলগুলি নিয়ে আলোচনা করার সাথে সাথে আপনি অন্যান্য টিমের ডেটা যোগ করতে পারেন ।
![]() শিক্ষকদের টিপস
শিক্ষকদের টিপস
-
বলটি বিভিন্ন দূরত্বে বিভিন্ন দিকে লাফানোর জন্য জায়গাটি প্রস্তুত করুন। প্রয়োজন অনুযায়ী দরজা এবং/অথবা জানালা বন্ধ করুন।
-
এক্সপ্লোরিং বেগের টেবিলটি নিচ থেকে সংরক্ষণ করা যেতে পারে, অথবা শিক্ষার্থীরা তাদের ইঞ্জিনিয়ারিং নোটবুকে টেবিলটি পুনরায় তৈরি করতে পারে।
-
টিম ইঞ্জিনিয়ারিং নোটবুক মূল্যায়নের জন্য একটি রুব্রিক এখানে পাওয়া যাবে (Google / .docx / .pdf), এবং পৃথক নোটবুক মূল্যায়নের জন্য একটি রুব্রিক এখানে পাওয়া যাবে (Google / .docx / .pdf)। যখনই আপনি শিক্ষার্থীদের কাজ মূল্যায়নের জন্য একটি রুব্রিক ব্যবহার করবেন, তখন প্রকল্পের কাজ শুরু করার আগে তাদের সাথে রুব্রিকটি ভাগ করে নিতে ভুলবেন না।

আপনি আপনার ডেটা সংগ্রহ করার সাথে সাথে আপনার ইঞ্জিনিয়ারিং নোটবুকের নীচের প্রশ্নগুলির বিষয়ে চিন্তা করুন এবং উত্তর দিন:
- আপনি কীভাবে বলতে পারেন যে সংঘর্ষের সময় রোবটের ভরবেগ বলটিতে শক্তি স্থানান্তরিত করেছিল? বিস্তারিত বুঝিয়ে বলুন ।
- আরও অন্তত দুবার পরীক্ষাটি পুনরাবৃত্তি করুন । ৫০ % এর কম বেগে গাড়ি চালানোর চেষ্টা করুন । বলটি তার অবস্থানে পুনরায় সেট করুন এবং বলটি কতদূর ভ্রমণ করে তা টেবিলে রেকর্ড করুন । এছাড়াও, 50% এর বেশি বেগের চেষ্টা করুন । বলটি তার অবস্থানে পুনরায় সেট করুন এবং বলটি কতদূর ভ্রমণ করে তা টেবিলে রেকর্ড করুন ।
- যখন সমস্ত দল তাদের তিনটি পরীক্ষা শেষ করে, তখন অন্যান্য দলগুলি যে গতিটি বেছে নিয়েছিল এবং বলটি তাদের পরীক্ষায় কতদূর ভ্রমণ করেছিল তা নিয়ে আলোচনা করুন । দলগুলি তাদের ডেটা ভাগ করে নেওয়ার সাথে সাথে তাদের ফলাফলগুলি আপনার টেবিলে যোগ করুন ।
- ডেটাতে প্যাটার্ন(গুলি) খুঁজুন । সেট বেগ বাড়ার সাথে সাথে বল দ্বারা ভ্রমণ করা দূরত্ব কি বৃদ্ধি বা হ্রাস পায়?
![]() শিক্ষক টুলবক্স
-
উত্তর
শিক্ষক টুলবক্স
-
উত্তর
-
বলের নড়াচড়া প্রমাণ করে যে সংঘর্ষের সময় রোবটটি শক্তি স্থানান্তর করেছিল। শিক্ষার্থীরা আঘাতের পর বলের গতি বা তার ভ্রমণের দিক প্রমাণ হিসেবে বর্ণনা করতে পারে।
-
বলটি কত দূরত্ব অতিক্রম করবে তা ব্যবহৃত বলের ভর/ওজন এবং রোবটের জন্য নির্ধারিত বেগের উপর নির্ভর করে।
-
শিক্ষার্থীদের বুঝতে হবে যে উচ্চ বেগ বলকে নিম্ন বেগের চেয়ে বেশি দূরে নিয়ে যায়। স্পষ্টভাবে এটিকে রোবটের ভরবেগের সাথে সংযুক্ত করুন। রোবটের ওজন পরিবর্তিত হয়নি, কেবল এর বেগ পরিবর্তিত হয়েছে, বরং উভয়ই রোবটের ভরবেগে অবদান রাখে তা তুলে ধরুন। তাদের জিজ্ঞাসা করুন যে তারা কি মনে করে রোবটটি ভারী হলে বলটি এতদূর যেতে পারত? সম্ভবত হবে। পরবর্তী পাঠে সংঘর্ষের সময় বলের ভরের প্রভাব সম্পর্কে আরও তথ্য থাকবে।
-
ছাত্রদলগুলি হয়তো ব্যাপক পরিবর্তনশীল বেগ নির্বাচন করেছে কিন্তু সামগ্রিক শিক্ষার উদ্দেশ্য হল শিক্ষার্থীদের বুঝতে হবে যে উচ্চতর বেগ বৃহত্তর ভরবেগের দিকে পরিচালিত করে যা সংঘর্ষের সময় বলের দিকে আরও শক্তি স্থানান্তর করে।