
![]() Tanári eszköztár
Tanári eszköztár
-
Tevékenységvázlat
Ez a feltárás először bemutatja a tanulóknak a vezetési sebesség beállítását, majd megkéri őket, hogy vizsgálják meg, hogyan befolyásolja a robot sebessége a lendületét. Kattintson ide (Google / .docx / .pdf) a tevékenység vázlatához. A robot lendületének megértése fontos fogalom lesz a Strike Challenge tekejátékban. -
utasítás. A tevékenység irányított részében a tanulók különböző sebességekkel mozgatják a Speedbotot, és a tevékenység végén arra kérik őket, hogy alkalmazzák a sebesség programozási készségeiket a lendület- és energiaátviteli teszteken.
A Speedbot készen áll a különböző sebességű vezetésre!
Ez a vizsgálat segít többet megtudni a Speedbot programozásáról, hogy a feladatnak leginkább megfelelő sebességgel vezessen. A Strike Challenge végén olyan sebességet kell találnod a Speedbot számára, amely lehetővé teszi, hogy gyors legyen és nagy lendülettel bírjon, de továbbra is kézben maradjon, hogy jó szögben és nagy erővel üthesd el a labdát.
![]() Tanári eszköztár
Tanári eszköztár
Itt található a VEXcode V5 felhasználói felületének áttekintése. A diákok a Momentum Alley STEM Lab tevékenységei során megismerkedhetnek ezekkel a fülekkel/gombokkal. A STEM Labban is találhatók hivatkozások, amelyek további információkat nyújtanak ezekről a lapokról/gombokról. 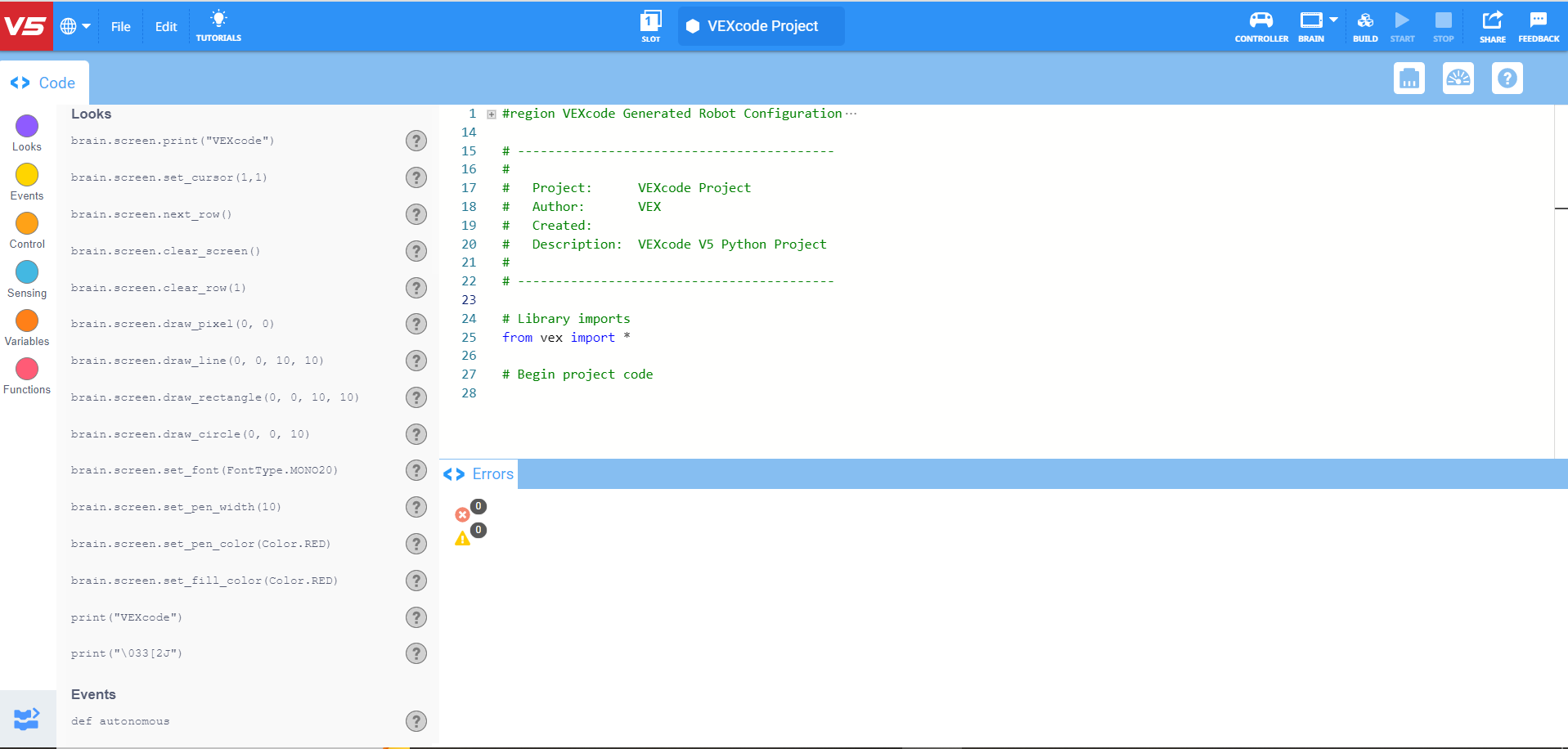
A vizsgálat első részében használt VEXcode V5 Python utasítások:
-
drivetrain.set_drive_velocity(50, SZÁZALÉK)
-
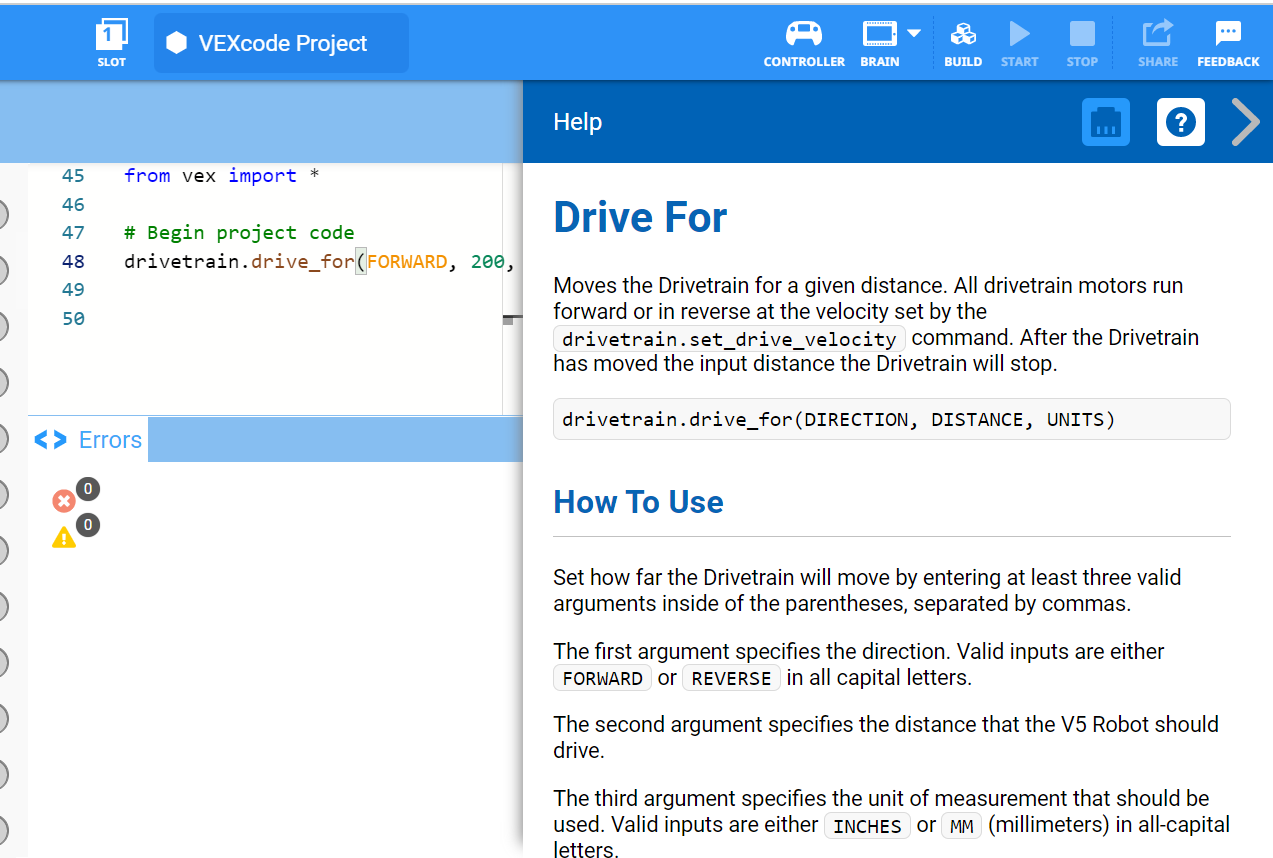
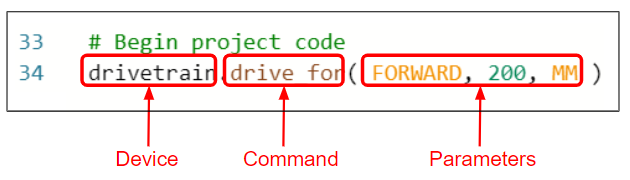
drivetrain.drive_for(ELŐRE, 200, MM)
-
Ha további információkat szeretne megtudni egy utasításról, válassza a Súgó lehetőséget, majd kattintson a kérdőjel ikonra az utasítás mellett, hogy további információkat jelenítsen meg.
Győződjön meg arról, hogy a szükséges hardver, a mérnöki notebook és a VEXcode V5 letöltötte és készen áll.
![]() Tanári tippek
Tanári tippek
Ha a hallgató először használja a VEXcode V5-öt, a feltárás során bármikor hivatkozhat az oktatóanyagokra. Az oktatóanyagok az Eszköztárban találhatók. 
Minden tanulócsoportnak be kell szereznie a szükséges hardvert és a csoport mérnöki jegyzetfüzetét. Ezután nyissa meg a VEXcode V5-öt.
| Mennyiség | Szükséges anyagok |
|---|---|
| 1 |
Speedbot robot |
| 1 |
Feltöltött robot akkumulátor |
| 1 |
VEXcode V5 |
| 1 |
USB-kábel (ha számítógépet használ) |
| 1 |
Mérnöki jegyzetfüzet |
| 1 |
Labda (egy futballlabda mérete és alakja) |
| 1 |
3m x 3m szabad tér |
| 1 |
Mérőpálca vagy vonalzó |
| 1 |
Szalagtekercs |
| 1 |
![]() Tanári tippek
Tanári tippek
Modellezze az egyes hibaelhárítási lépéseket a tanulók számára.
1. lépés: Feltárás előkészítése
Mielőtt elkezdené a tevékenységet, készen van az összes ilyen elem?
-
Az intelligens kábelek teljesen be vannak dugva az összes motorba?
-
A Brain be van kapcsolva?
-
Az akkumulátor fel van töltve?
2. lépés: Indítson el egy új projektet
A projekt elindításához hajtsa végre a következő lépéseket:
-
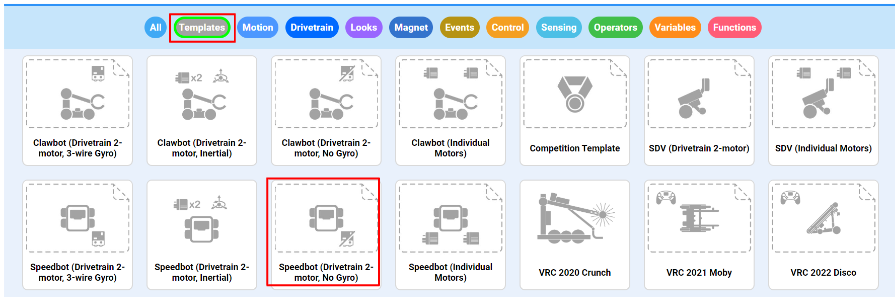
Nyissa meg a Fájl menüt, és válassza a Példák megnyitása lehetőséget.

-
Válassza ki és nyissa meg a Speedbot (Drivetrain 2-motor, No Gyro) sablonprojektet. A sablonprojekt tartalmazza a Speedbot motorkonfigurációját. Ha nem használja a sablont, akkor a robot nem fogja megfelelően futtatni a projektet.
-
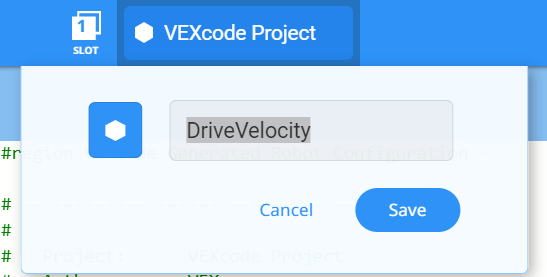
Mivel a sebesség feltárásán fog dolgozni, a projektjét DriveVelocitynéven fogja elnevezni. Ha végzett, válassza Mentés lehetőséget.
![]() Tanári tippek
Tanári tippek
-
A projektnevekben szóköz lehet a szavak között vagy után.

-
Megkérheti a tanulókat, hogy adják hozzá kezdőbetűiket vagy csoportjuk nevét a projekt nevéhez. Ez segít megkülönböztetni a projekteket, ha felkéri a diákokat, hogy nyújtsák be őket.
-
Mivel ez az első programozási tevékenység, amellyel a tanulók próbálkozhatnak, modellezze a lépéseket, majd kérje meg a tanulókat, hogy hajtsák végre ugyanazokat a műveleteket. A tanárnak ezután figyelnie kell a tanulókat, hogy megbizonyosodjon arról, hogy helyesen követik-e a lépéseket.
-
Győződjön meg arról, hogy a tanulók a Fájl menüből a Példák megnyitása lehetőséget választották.
-
Győződjön meg arról, hogy a tanulók a Speedbot (Drivetrain 2-motor, No Gyro) sablonprojektet választották.
-
Felhívhatja a tanulók figyelmét, hogy a Példák oldalon több lehetőség közül választhat. Ahogy más robotokat építenek és használnak, lehetőségük lesz különböző sablonok használatára.
- Győződjön meg arról, hogy a DriveVelocity projekt neve most már az Eszköztár közepén lévő ablakban található.

![]() Tanári eszköztár
-
Projektek mentése
Tanári eszköztár
-
Projektek mentése
-
Mutasson rá, hogy amikor először megnyitották a VEXcode V5-öt, az ablak VEXcode Project címkével volt ellátva. A VEXcode Project az alapértelmezett projektnév a VEXcode V5 első megnyitásakor. Miután a projektet átnevezték Drive-ra és elmentették, a kijelző frissült, és az új projektnév jelenik meg. Az eszköztár ezen ablaka segítségével könnyen ellenőrizhető, hogy a tanulók a megfelelő projektet használják-e.
-
Mondd el a tanulóknak, hogy készen állnak az első projekt megkezdésére. Magyarázza el a tanulóknak, hogy néhány egyszerű lépést követve képesek lesznek olyan projektet létrehozni és futtatni, amely előremozdítja a Speedbotot.
-
Emlékeztesd a tanulókat, hogy munka közben mentsék el projektjeiket. A VEX Library Python szakasza elmagyarázza a VEXcode V5 mentési gyakorlatait.
![]() Tanári eszköztár
-
Állj meg és beszéld meg
Tanári eszköztár
-
Állj meg és beszéld meg
Ez egy jó pont arra, hogy megálljon, és kérje meg a tanulókat, hogy nézzék át az éppen befejezett lépéseket egy új projekt VEXcode V5-ben egyéni vagy csoportos indításakor. Kérje meg a tanulókat, hogy egyénileg gondolkodjanak el, mielőtt megosztanák a csoportjukkal vagy az egész osztálynak.
3. lépés: Hajtson előre 150 mm-t különböző sebességekkel
Még nem áll készen arra, hogy elkezdje programozni a robotot, hogy különböző sebességgel haladjon előre!
- Mielőtt elkezdenénk a programozást, meg kell értenünk, mi az utasítás. Egy utasításnak három része van.
![]() Tanári tippek
Tanári tippek
Amikor elkezdi beírni az utasítást, észrevehet egy automatikus kiegészítési funkciót. Használja a „Fel” és „Le” billentyűket a kívánt név kiválasztásához, majd nyomja meg a „Tab” vagy az (Enter/Return) gombot a billentyűzeten a kiválasztáshoz. A funkcióval kapcsolatos további információkért tekintse meg a Python cikket. 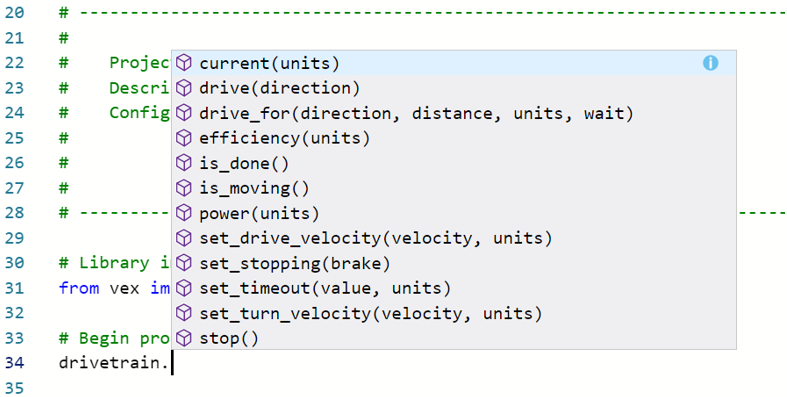
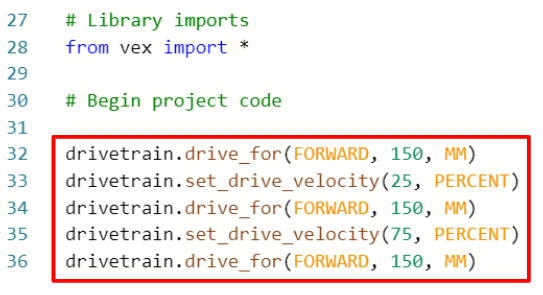
- Adja hozzá az utasításokat a projekthez:
![]() Tanári tippek
Tanári tippek
Figyeljük meg, hogy a második és harmadik utasítás (a fenti kép 33. és 34. sora) megegyezik a negyedik és ötödik utasítással (fenti 35. és 36. sor), de eltérő sebességparaméterrel. A harmadik utasítás hozzáadása után a tanulók kiemelhetik az ismételendő sorokat, és kimásolhatják és beilleszthetik őket a projekt befejezéséhez. Ezután 75 százalékra módosíthatják a sebességet a negyedik sorban.
-
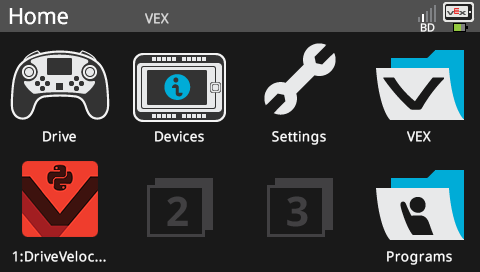
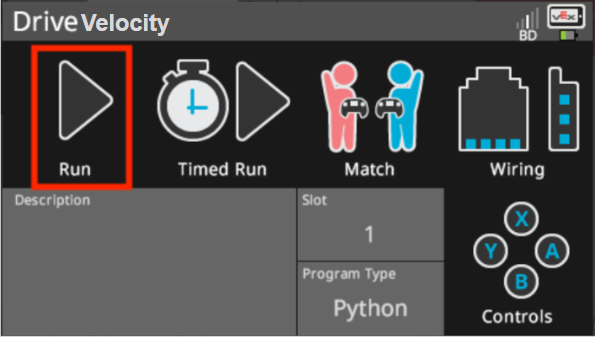
Válassza a Slot ikont, hogy a Robot Brain nyolc rendelkezésre álló helye közül válasszon egyet, majd válassza ki az 1-es helyet.

-
Csatlakoztassa a V5 Robot Braint a számítógéphez egy mikro USB-kábellel, és kapcsolja be a V5 Robot Braint. Az Agy ikon az eszköztáron zöldre vált a sikeres kapcsolat létrehozása után.

-
Válassza Letöltés a projekt agyba való letöltéséhez.

![]() Tanári eszköztár
Tanári eszköztár
- Emlékeztesd a tanulókat, hogy húzzák ki az USB-kábelt a Robot Brainből. Ha egy projekt futtatása közben a robot számítógéphez csatlakozik, a robot meghúzhatja a csatlakozókábelt.
-
A Robot Brain képernyőjén ellenőrizze, hogy a projektjéhez letöltött (Python) van-e. A DriveVelocity projektnévnek szerepelnie kell az 1. nyílásban.
![]() Tanári eszköztár
Tanári eszköztár
-
Állj meg és vitasd meg
Kérd meg a tanulókat, hogy mondják meg, mi fog történni, amikor a projektet letöltik és a Speedbot roboton futtatják. Mondd meg a tanulóknak, hogy jegyezzék fel előrejelzéseiket a mérnöki füzetükbe. Ha az idő engedi, kérjen meg minden csoportot, hogy osszák meg előrejelzésüket.A tanulók megjósolják, hogy a Speedbot először az alapértelmezett sebességével (50%) halad előre, majd lassabban (25%), mint az alapértelmezett sebesség, majd gyorsabban (75%), mint az alapértelmezett sebesség.
-
Modell először
Modellezze a projektet az osztály előtt, mielőtt az összes diák egyszerre próbálkozna. Gyűjtsd össze a tanulókat egy területen, és hagyj elegendő helyet a Speedbotnak, hogy mozoghasson, ha a padlóra kerül.Mondja el a tanulóknak, hogy most rajtuk a sor, hogy levezessék projektjüket. Győződjön meg arról, hogy szabad útjuk van, és hogy egyetlen Speedbot sem ütközhet össze.
-
Futtassa (Python) a projektet a roboton úgy, hogy megbizonyosodjon arról, hogy a projekt ki van választva, majd nyomja meg a Run gombot a Robot Brain-en. Gratulálunk első projektjének elkészítéséhez!
4. lépés: Haladás előre és hátrafelé 150 mm-ig különböző sebességeken
Most, hogy beprogramozta a robotját, hogy különböző sebességekkel haladjon előre, programozza úgy, hogy most különböző sebességgel haladjon előre és hátra.
-
Módosítsa a paramétert a második drive_for utasításban REVERSEmegjelenítésére.

-
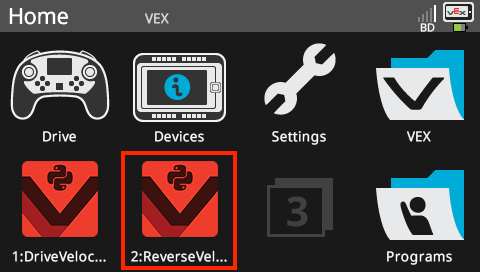
Válassza ki a projekt nevét, hogy DriveVelocity értékről ReverseVelocity értékre módosítsa.

-
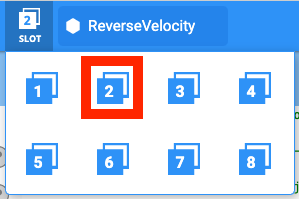
Új slot kiválasztásához válassza a Slot ikont. Válassza ki a 2-es helyet.
-
Töltse le (Python) a projektet.

-
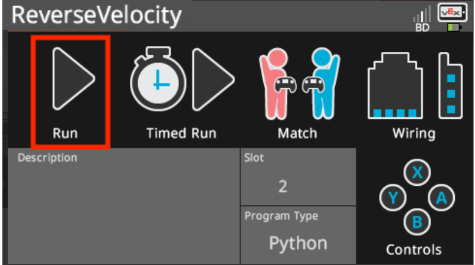
A Robot Brain képernyőjén ellenőrizze, hogy a projektjéhez letöltött (Python) van-e. A ReverseVelocity projektnévnek szerepelnie kell a 2. nyílásban.
-
Futtassa (Python) a projektet a roboton úgy, hogy megbizonyosodjon arról, hogy a projekt ki van választva, majd nyomja meg a Run gombot a Robot Brain-en.
![]() Tanári eszköztár
4. lépés végrehajtása
Tanári eszköztár
4. lépés végrehajtása
-
A drive_for parancs megváltoztatásához előre ról hátrare, egyszerűen módosítsa az első paramétert REVERSE értékre. Ezzel a hajtásláncban lévő motorok az ellenkező irányba mozognak.
-
A mm-ek száma módosítható, de ebben a példában az előző lépésben beállított 150 mm-en hagyjuk őket.
-
Emlékeztesd a tanulókat, hogy a projekt futtatása előtt húzzák ki az USB-kábelt a Robot Brainből.
-
Emlékeztesd a tanulókat, hogy munka közben mentsék el projektjeiket. A VEX könyvtárnak van egy szakasza Python számára, amely elmagyarázza a VEXcode V5 mentési gyakorlatait.
![]() Tanári tippek
Tanári tippek
Kérje meg a csapatokat, hogy osszák meg a tesztterületet és a labdát, ha szükséges, de több tesztelési terület is kialakítható, mindegyik saját labdával. Döntse el, hogy be szeretné-e állítani a tesztelési terület(eke)t, vagy azt szeretné, hogy a tanulók tegyék ezt meg.
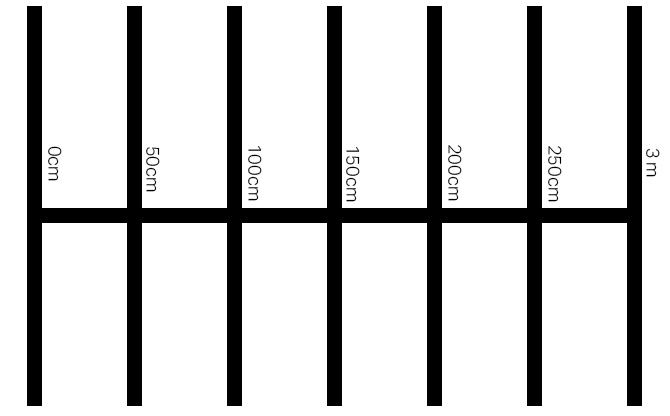
5. lépés: A tesztelési terület beállítása
-
Használjon szalagot és egy mérőpálcát, hogy 3 m-es vonalat hozzon létre a padlón, mint a fenti képen látható vízszintes vonal.
-
A vonal létrehozása után szalaggal és a mérőpálcával még egyszer hozzon létre 1 méteres vonalakat a 3 méteres vonalon, mint a fenti képen látható függőleges vonalak. Ragassza fel 1 m-es vonalat minden 50 cm-es jelölésnél a függőleges vonalra, 0 cm-től kezdve.
-
A rövidebb vízszintes vonalakat a hosszabb függőleges vonal közepére kell helyezni.
-
-
Amíg a területet felállítják, csapata egy vagy két tagjának létre kell hoznia egy új projektet Momentum néven. Állítsa a sebességet 50%-ra, és a Speedbot 50 cm-rel haladjon előre az első sorig. Tartsa szem előtt az 1 cm = 10 mm-t, így a robot 50 cm-t vagy 500 millimétert fog előre haladni.
![]() Tanári eszköztár
-
Miért ez a tevékenység?
Tanári eszköztár
-
Miért ez a tevékenység?
-
Az adatgyűjtés és -elemzés, még az egyszerű mintafelismerés is alapvető tudományos ismeretek. Ez a tevékenység struktúrát ad az adatelemzéshez azáltal, hogy megakadályozza a gyakori félrelépéseket.
-
Figyeljük meg, hogy az utasítások nem azt mondják a tanulóknak, hogy változtassák a robot vezetési távolságát és a robot sebességét. Ez egy szándékos alkalmazása annak, amit a tanuló tudósok Változók Kontroll Stratégiának neveznek. Fontos megtanítani a kezdő kutatókat arra, hogy egyszerre egy változót (azaz a sebességet ebben az esetben) manipulálják, hogy meghatározzák annak hatását egy második változóra (azaz a labda ütközés utáni távolságára), mert nem feltétlenül ezt a megközelítést alkalmazzák a diákok. spontán módon a találgatás és ellenőrzés módszerével. A tipikus tippelés és ellenőrzés megközelítések gyakran egynél több változót manipulálnak egyszerre (azaz megváltoztatják mind a sebességet, mind a robot által megtett távolságot), és megfigyelik az összefolyás hatását a labda elforgatása utáni távolságra. Ez a tevékenység megpróbálja elvezetni a tanulókat ettől, mert a változók közötti kapcsolatok ekkor nem egyértelműek. Vajon a robot nagyobb sebessége, minél nagyobb távolságot hajt meg, vagy mindkettő az, ami miatt a labda messzebbre halad? Erre nem tudunk válaszolni, ha mindkét változót egyszerre kezeljük.
-
A csapatok azonban spontán módon megpróbálhatják különböző távolságokra vezetni a robotot. Ha ezt megfigyeled, kérd meg őket, hogy változtassák meg a távolságot, de tartsák meg a sebességet ugyanazon, mint az eredeti 500 mm-es távolsággal. Így összehasonlíthatják ugyanazt a sebességet a különböző vezetési távolságokkal, hogy megnézzék, vajon a robot vezetési távolsága befolyásolja-e a labda elhaladását.
6. lépés: Az energiaátvitel tesztelése ütközések során

Bowling kihívás tesztterület robottal és labdával
Központosítsa a labdát az 50 cm-es vízszintes vonalon, és helyezze el a robotját úgy, hogy az eleje a 0 cm-es vízszintes vonal közepén legyen. Győződjön meg arról, hogy a robot eleje a labda irányába néz. Futtassa az első Momentum projektjét, amelynek sebessége 50%-ra van beállítva, és figyeljen oda, ahogy a robot összeütközik a labdával.
Jegyezze fel a beállított sebességet, a megtett távolságot és a labda által megtett távolságot ebben az adattáblázatban (Google / .pdf). A táblázat első sora az előző lépésben feldolgozott Momentum projekt alapján lett elindítva. Folytassa az adatok hozzáadását ehhez a táblázathoz, miközben különböző sebességeket próbál beállítani. Ezután hozzáadhat más csapatok adatait, miközben osztályonként megvitatja megállapításait.
![]() Tanári tippek
Tanári tippek
-
Készítse elő azt a területet, ahol a labda különböző irányokba pattanhat különböző távolságok esetén. Szükség szerint zárja be az ajtókat és/vagy az ablakokat.
-
Az Exploring Velocity táblázat alulról menthető, vagy a tanulók újra létrehozhatják a táblázatot a mérnöki jegyzetfüzeteikben.
-
A csapatmérnöki jegyzetfüzetek értékelésére szolgáló rubrika itt található (Google / .docx / .pdf), az egyes jegyzetfüzetek értékelésének rubrikája pedig itt (Google / .docx / . pdf). Amikor azt tervezi, hogy a tanulók munkáját rubrikával (rubrikákkal) értékeli, feltétlenül ossza meg velük a rubrikát, mielőtt elkezdené dolgozni a projekten.

Gondolja át és válaszoljon az alábbi kérdésekre a mérnöki jegyzetfüzetében, miközben gyűjti adatait:
-
Hogyan állapítható meg, hogy a robot lendülete energiát adott át a labdának az ütközés során? Magyarázd meg részletekkel.
-
Ismételje meg a tesztet még legalább kétszer. Próbálkozzon 50%-nál kisebb sebességgel. Állítsa vissza a labdát a helyére, és rögzítse a táblázatban, hogy a labda mennyit utazik. 50%-nál nagyobb sebességgel is próbálkozzon. Állítsa vissza a labdát a helyére, és rögzítse a táblázatban, hogy a labda mennyit utazik.
-
Amikor az összes csoport befejezte a három tesztet, beszéljétek meg a többi csoport által választott sebességet és azt, hogy a labda mekkora utat tett meg a tesztekben. Miközben a csapatok megosztják adataikat, adja hozzá a megállapításaikat a táblázathoz.
-
Keressen minta(ka)t az adatokban. Növekszik vagy csökken a labda által megtett távolság a beállított sebesség növekedésével?
![]() Tanári Eszköztár
-
Válaszok
Tanári Eszköztár
-
Válaszok
-
A labda mozgása bizonyítja, hogy a robot energiát adott át az ütközés során. A tanulók bizonyítékként leírhatják a labda ütközés utáni sebességét vagy haladási irányát is.
-
A labda által megtett távolság a használt labda tömegétől/súlyától és a robot számára beállított sebességtől függ.
-
A tanulóknak fel kell ismerniük, hogy a nagyobb sebességek miatt a labda messzebbre halad, mint a kisebb sebesség. Ezt kifejezetten kösse össze a robot lendületével. Emelje ki, hogy a robot súlya nem változott, csak a sebessége, de mindkettő hozzájárul a robot lendületéhez. Kérdezd meg tőlük, hogy szerintük a labda olyan messzire utazna, ha a robot nehezebb lenne. Feltehetően így lenne. A labda ütközés közbeni tömegének hatásairól a következő olvasatban olvashat bővebben.
-
A tanulócsoportok széles körben változó sebességeket választhattak, de az általános tanulási cél az, hogy a tanulók felismerjék, hogy a nagyobb sebesség nagyobb lendületet eredményez, amely több energiát ad át a labdának ütközések során.