
![]() Opettajan työkalupakki
Opettajan työkalupakki
-
Tehtävän hahmotelma
Tämä tutkimus esittelee oppilaat ensin ajonopeuden asettamiseen ja sitten pyytää heitä tutkimaan, miten robotin nopeus vaikuttaa sen vauhtiin. Napsauta tätä (Google / .docx / .pdf) nähdäksesi tämän toiminnan pääpiirteet. Robotin vauhdin ymmärtäminen on tärkeä käsite Strike Challenge -keilapelissä. -
Mitä opiskelijat ohjelmoivat
Speedbot (Drivetrain 2-motor, No Gyro) -malliprojektin avulla opiskelijat voivat muuttaa Speedbotin nopeusasetuksia yksinkertaisesti lisäämällä set_drive_velocity kohtaan drive_for ohje. Tehtävän ohjatussa osassa opiskelijat liikuttavat Speedbotia eri nopeuksilla ja harjoituksen lopussa heitä pyydetään soveltamaan taitojaan ohjelmointinopeuden suhteen liikemäärän ja energiansiirron testeihin.
Speedbot on valmis ajamaan eri nopeuksilla!
Tämä tutkimus auttaa sinua oppimaan lisää Speedbotin ohjelmoinnista ajamaan tehtävään parhaiten sopivalla nopeudella. Strike Challengen lopussa sinun on löydettävä Speedbotille nopeus, joka mahdollistaa sen nopean ja suuren vauhdin, mutta pysyy hallinnassa, jotta voit lyödä palloa hyvässä kulmassa ja suurella voimalla.
![]() Opettajan työkalupakki
Opettajan työkalupakki
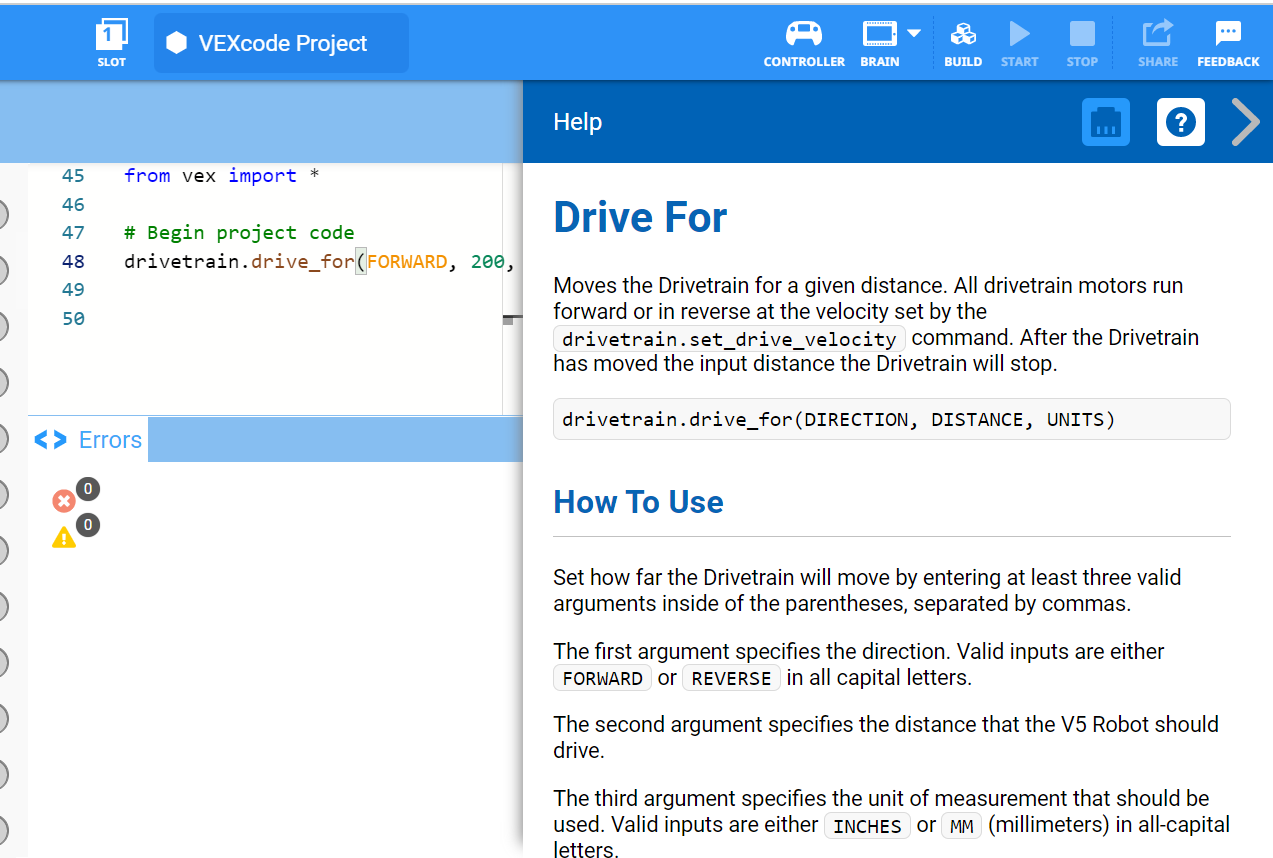
Tässä on yleiskatsaus VEXcode V5:n käyttöliittymästä. Opiskelijat tutustuvat näihin välilehtiin/painikkeisiin tämän Momentum Alley STEM Labin toimintojen aikana. STEM Labissa on myös linkkejä, jotka tarjoavat lisätietoja näistä välilehdistä/painikkeista. 
VEXcode V5 Python -ohjeet, joita käytetään tämän tutkimuksen ensimmäisessä osassa:
-
drivetrain.set_drive_velocity(50, PROSENTTIA)
-
drivetrain.drive_for(FORWARD, 200, MM)
-
Saat lisätietoja ohjeesta valitsemalla Ohje ja valitsemalla sitten ohjeen vieressä olevan kysymysmerkkikuvakkeen nähdäksesi lisätietoja.
Varmista, että sinulla on tarvittava laitteisto, suunnittelumuistikirja ja VEXcode V5 ladattu ja valmiina.
![]() Opettajan vinkkejä
Opettajan vinkkejä
Jos tämä on ensimmäinen kerta, kun opiskelija käyttää VEXcode V5:tä, hän voi viitata opetusohjelmiin milloin tahansa tämän tutkimisen aikana. Opetusohjelmat sijaitsevat työkalupalkissa. 
Jokaisen opiskelijaryhmän tulee hankkia tarvittava laitteisto ja ryhmän suunnittelumuistikirja. Avaa sitten VEXcode V5.
| Määrä | Tarvittavat materiaalit |
|---|---|
| 1 |
Speedbot robotti |
| 1 |
Ladattu robotin akku |
| 1 |
VEXcode V5 |
| 1 |
USB-kaapeli (jos käytät tietokonetta) |
| 1 |
Tekninen muistikirja |
| 1 |
Pallo (jalkapallon koko ja muoto) |
| 1 |
3m x 3m vapaata tilaa |
| 1 |
Mittaritikku tai viivain |
| 1 |
Rulla teippiä |
| 1 |
![]() Opettajan vinkkejä
Opettajan vinkkejä
Mallina jokainen vianetsintävaihe opiskelijoille.
Vaihe 1: Valmistautuminen etsintään
Ennen kuin aloitat toiminnan, onko sinulla kaikki nämä asiat valmiina?
-
Onko kaikki moottorit kytketty oikeisiin -portteihin?
-
Onko älykkäät kaapelit kytketty kunnolla kaikkiin moottoreihin?
-
Onko Brain päällä?
-
Onko akku ladattu?
Vaihe 2: Aloita uusi projekti
Aloita projekti suorittamalla seuraavat vaiheet:
-
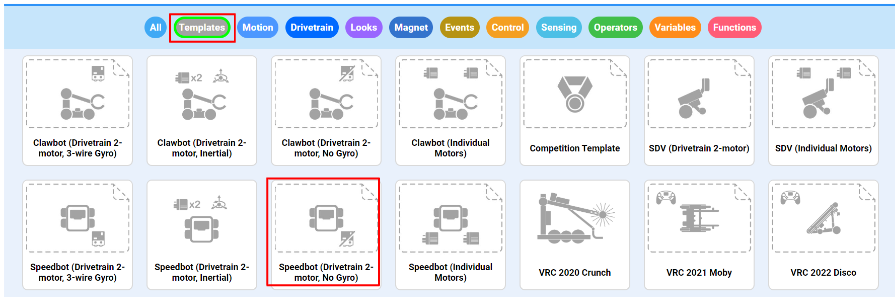
Avaa Tiedosto-valikko ja valitse Avaa esimerkit.

-
Valitse ja avaa Speedbot (Drivetrain 2-motor, No Gyro) -malliprojekti. Malliprojekti sisältää Speedbotin moottorikokoonpanon. Jos mallia ei käytetä, robottisi ei suorita projektia oikein.
-
Koska työskentelet nopeuden tutkimisen parissa, annat projektillesi nimeksi DriveVelocity. Kun olet valmis, valitse Tallenna.
![]() Opettajan vinkkejä
Opettajan vinkkejä
-
Projektien nimissä voi olla välilyöntejä sanojen välissä tai jälkeen.

-
Voit pyytää oppilaita lisäämään nimikirjaimensa tai ryhmänsä nimen projektin nimeen. Tämä auttaa erottamaan projektit, jos pyydät opiskelijoita lähettämään ne.
-
Koska tämä on ensimmäinen ohjelmointitoiminto, jota opiskelijat voivat yrittää, sinun tulee mallintaa vaiheet ja pyytää sitten oppilaita suorittamaan samat toiminnot. Opettajan tulee sitten valvoa oppilaita varmistaakseen, että he noudattavat ohjeita oikein.
-
Varmista, että opiskelijat ovat valinneet Tiedosto-valikosta Avaa esimerkit.
-
Varmista, että opiskelijat ovat valinneet Speedbot (Drivetrain 2-motor, No Gyro) -malliprojektin.
-
Voit huomauttaa opiskelijoille, että Esimerkit-sivulla on useita valintoja. Kun he rakentavat ja käyttävät muita robotteja, heillä on mahdollisuus käyttää erilaisia malleja.
- Tarkista, että projektin nimi DriveVelocity on nyt työkalupalkin keskellä olevassa ikkunassa.

![]() Opettajan työkalupakki
-
Projektien tallentaminen
Opettajan työkalupakki
-
Projektien tallentaminen
-
Huomaa, että kun he ensimmäisen kerran avasivat VEXcode V5:n, ikkunan nimi oli VEXcode Project. VEXcode Project on projektin oletusnimi, kun VEXcode V5 avataan ensimmäisen kerran. Kun projekti nimettiin uudelleen Driveksi ja tallennettu, näyttö päivitettiin näyttämään uusi projektin nimi. Tämän työkalupalkin ikkunan avulla on helppo tarkistaa, että opiskelijat käyttävät oikeaa projektia.
-
Kerro oppilaille, että he ovat nyt valmiita aloittamaan ensimmäisen projektinsa. Selitä oppilaille, että vain muutaman yksinkertaisen vaiheen avulla he voivat luoda ja suorittaa projektin, joka vie Speedbotia eteenpäin.
-
Muistuta oppilaita tallentamaan projektinsa työskennellessään. VEX-kirjaston Python -osio selittää VEXcode V5:n tallennuskäytännöt.
![]() Opettajan työkalupakki
-
Pysähdy ja keskustele
Opettajan työkalupakki
-
Pysähdy ja keskustele
Tämä on hyvä hetki pysähtyä ja pyytää oppilaita käymään läpi juuri suoritetut vaiheet uuden projektin aloittamisessa VEXcode V5:ssä yksin tai ryhmissä. Pyydä oppilaita pohtimaan itseään, ennen kuin he kertovat asiasta ryhmälleen tai koko luokalle.
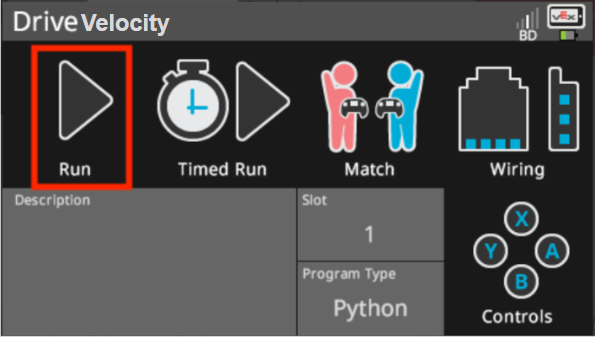
Vaihe 3: Aja eteenpäin 150 mm eri nopeuksilla
Et ole valmis aloittamaan robotin ohjelmointia ajamaan eteenpäin eri nopeuksilla!
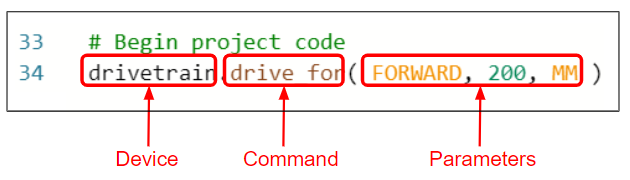
- Ennen kuin aloitamme ohjelmoinnin, meidän on ymmärrettävä, mikä ohje on. Ohjeessa on kolme osaa.
![]() Opettajan vinkkejä
Opettajan vinkkejä
Saatat huomata automaattisen täydennystoiminnon, kun alat kirjoittaa ohjetta. Käytä "Ylös"- ja "Alas"-näppäimiä valitaksesi haluamasi nimi ja paina sitten näppäimistön "Tab" tai (Enter/Return) tehdäksesi valinnan. Lisätietoja tästä ominaisuudesta on Python -artikkelissa. 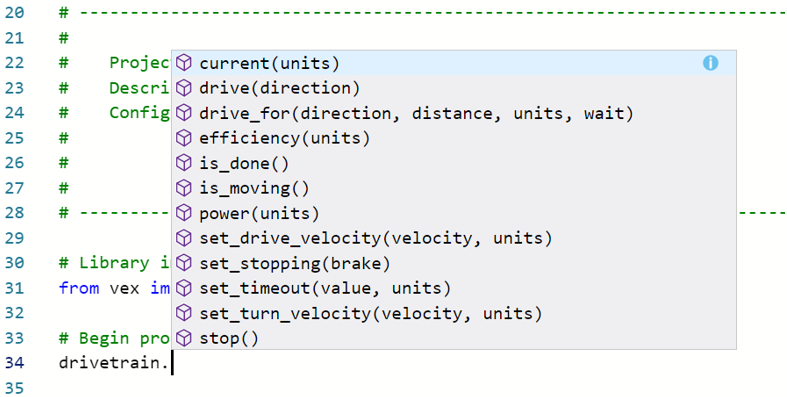
- Lisää ohjeet projektiin:
![]() Opettajan vinkkejä
Opettajan vinkkejä
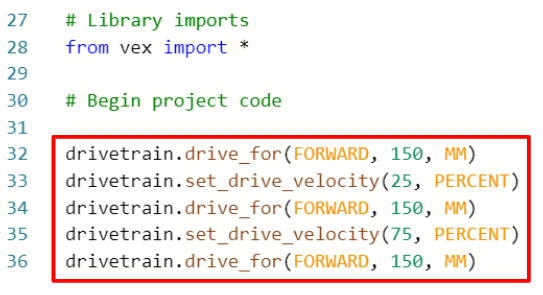
Huomaa, että toinen ja kolmas käsky (rivit 33 ja 34 yllä olevassa kuvassa) ovat samat kuin neljäs ja viides käsky (rivit 35 ja 36 yllä), mutta niillä on eri nopeusparametri. Kolmannen ohjeen lisäämisen jälkeen opiskelijat voivat korostaa toistettavat rivit ja kopioida ja liittää ne suorittaakseen projektin loppuun. Ne voivat sitten muuttaa neljännen rivin nopeuden 75 prosenttiin.
-
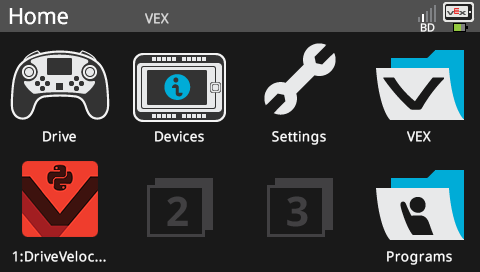
Valitse Slot-kuvake valitaksesi yksi kahdeksasta käytettävissä olevasta Robot Brainin paikasta ja valitse paikka 1.

-
Liitä V5 Robot Brain tietokoneeseen mikro-USB-kaapelilla ja käynnistä V5 Robot Brain. Aivot-kuvake työkalupalkissa muuttuu vihreäksi , kun yhteys on muodostettu.

-
Valitse Lataa ladataksesi projekti aivoihin.

![]() Opettajan työkalupakki
Opettajan työkalupakki
- Muistuta oppilaita irrottamaan USB-kaapeli Robot Brainista. Jos robotti on kytketty tietokoneeseen projektin aikana, robotti voi vetää liitäntäkaapelista.
-
Varmista, että projektissasi on ladattua (Python) katsomalla Robot Brainin näyttöä. Projektin nimen DriveVelocity tulee olla luettelossa paikassa 1.
![]() Opettajan työkalupakki
Opettajan työkalupakki
-
Pysähdy ja keskustele
Pyydä oppilaita ennustamaan, mitä he ajattelevat tapahtuvan, kun tämä projekti ladataan ja suoritetaan Speedbot-robotilla. Pyydä oppilaita kirjaamaan ennusteensa suunnittelumuistikirjoihin. Jos aika sallii, pyydä jokaista ryhmää kertomaan ennustuksensa.Opiskelijoiden tulee ennustaa, että Speedbot liikkuu ensin oletusnopeudellaan (50 %), sitten hitaammin (25 %) kuin oletusnopeus ja sitten nopeammin (75 %) kuin oletusnopeus.
-
Malli ensin
Mallinne projektin suorittamisesta luokan edessä, ennen kuin kaikki oppilaat yrittävät kerralla. Kokoa oppilaat yhdelle alueelle ja jätä tarpeeksi tilaa Speedbotille liikkua, jos se sijoitetaan lattialle.Kerro opiskelijoille, että nyt on heidän vuoronsa toteuttaa projektinsa. Varmista, että niillä on selkeä polku ja ettei mikään Speedbot törmää toisiinsa.
-
Suorita (Python) projekti robotissa varmistamalla, että projekti on valittu, ja paina sitten Robot Brainin Run -painiketta. Onnittelut ensimmäisen projektin luomisesta!
Vaihe 4: Aja eteen- ja taaksepäin 150 mm eri nopeuksilla
Nyt kun olet ohjelmoinut robotin ajamaan eteenpäin eri nopeuksilla, ohjelmoi se ajamaan eteenpäin ja taaksepäin eri nopeuksilla.
-
Muuta parametri toisessa drive_for -ohjeessa näyttämään REVERSE.

-
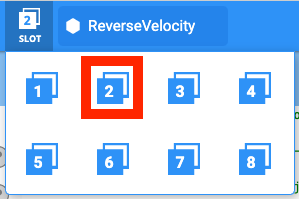
Valitse projektin nimi vaihtaaksesi sen arvosta DriveVelocity arvoon ReverseVelocity.

-
Valitse uusi paikka valitsemalla Slot-kuvake. Valitse paikka 2.
-
Lataa (Python) projekti.

-
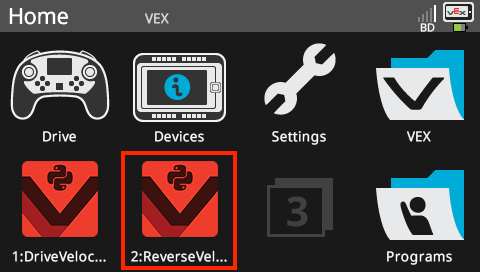
Varmista, että projektissasi on ladattua (Python) katsomalla Robot Brainin näyttöä. Projektin nimen ReverseVelocity tulisi olla luettelossa paikassa 2.
-
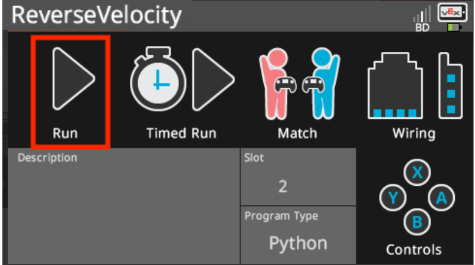
Suorita (Python) projekti robotissa varmistamalla, että projekti on valittu, ja paina sitten Robot Brainin Run -painiketta.
![]() Opettajan työkalupakki
-
Vaiheen 4 suorittaminen
Opettajan työkalupakki
-
Vaiheen 4 suorittaminen
-
Jos haluat muuttaa drive_for -komennon arvosta eteenpäin arvoon taaksepäin, muuta ensimmäinen parametri arvoksi REVERSE. Tämä saa voimansiirron moottorit liikkumaan vastakkaiseen suuntaan.
-
mm:n määrää voidaan muuttaa, mutta tässä esimerkissä jätämme ne 150 mm:iin, kuten edellisessä vaiheessa on asetettu.
-
Muistuta oppilaita irrottamaan USB-kaapeli Robot Brainista ennen projektin suorittamista.
-
Muistuta oppilaita tallentamaan projektinsa työskennellessään. VEX-kirjastossa on Python -osio, joka selittää VEXcode V5:n tallennuskäytännöt.
![]() Opettajan vinkkejä
Opettajan vinkkejä
Pyydä joukkueita jakamaan tarvittaessa testialue ja pallo, mutta myös useita testialueita, joilla kullakin on oma pallo, voidaan järjestää. Päätä, haluatko määrittää testausalue(t) vai haluatko oppilaiden tekevän niin.
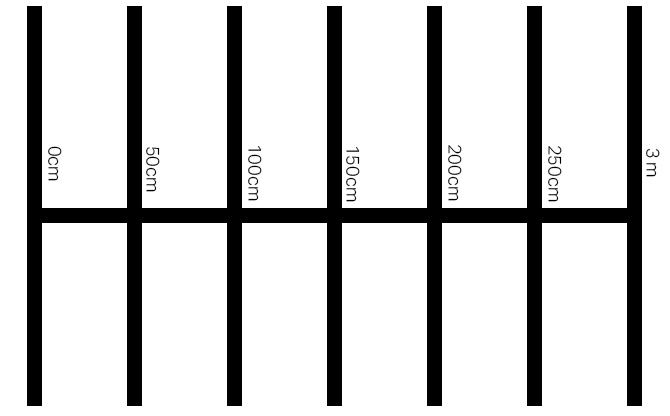
Vaihe 5: Testausalueen määrittäminen
-
Luo teipillä ja metritikulla lattialle 3 metrin viiva, kuten yllä olevassa kuvassa näkyvä vaakaviiva.
-
Kun viiva on luotu, käytä teippiä ja mittarin sauvaa vielä kerran luodaksesi 1 metrin viivat 3 metrin viivalle, kuten yllä olevassa kuvassa olevat pystyviivat. Teippaa 1 m:n viiva joka 50 cm:n merkkiin pystyviivaan aloittamalla 0 cm:stä.
-
Lyhyemmät vaakaviivat tulee keskittää pidemmän pystysuoran viivan kohdalle.
-
-
Kun aluetta rakennetaan, yhden tai kahden tiimisi jäsenen tulee luoda uusi projekti nimeltä Momentum. Aseta nopeus 50 %:iin ja anna Speedbotin ajaa eteenpäin ensimmäiselle riville 50 cm. Muista 1 cm = 10 mm, jotta robotti kulkee eteenpäin 50 cm tai 500 mm.
![]() Opettajan työkalupakki
-
Miksi tämä aktiviteetti?
Opettajan työkalupakki
-
Miksi tämä aktiviteetti?
-
Tiedonkeruu ja analysointi, jopa yksinkertainen hahmontunnistus, ovat tieteen perustaitoja. Tämä toiminto lisää rakennetta data-analyysiin estämällä yleisiä virheitä.
-
Huomaa, että ohjeet eivät käske oppilaita vaihtelemaan robotin ajomatkaa robotin nopeuden kanssa. Tämä on tarkoituksellinen sovellus sille, mitä oppivat tiedemiehet kutsuvat muuttujien hallintastrategiaksi. Aloittelevien tutkijoiden opettaminen manipuloimaan yhtä muuttujaa kerrallaan (ts. tässä tapauksessa nopeutta) sen vaikutuksen määrittämiseksi toiseen muuttujaan (eli matkaan, jonka pallo kulkee törmäyksen jälkeen), on tärkeää, koska se ei välttämättä ole lähestymistapa, jota opiskelijat omaksuvat. spontaanisti arvaa ja tarkista. Tyypilliset arvaa ja tarkista -lähestymistavat käsittelevät usein useampaa kuin yhtä muuttujaa kerrallaan (eli muuttavat sekä nopeutta että robotin kulkemaa matkaa) ja tarkkailevat yhtymäkohdan vaikutusta matkaan, jonka pallo kulkee pyörimisen jälkeen. Tämä toiminta yrittää ohjata oppilaita pois siitä, koska muuttujien väliset suhteet ovat silloin moniselitteisiä. Johtaako robotin suurempi nopeus, mitä pidemmälle robotti ajaa, vai molemmat, jotka johtavat pallon kulkemaan kauemmas? Emme voi vastata siihen, kun käsittelemme molempia muuttujia samanaikaisesti.
-
Ryhmät voivat kuitenkin spontaanisti yrittää ajaa robottia eri etäisyyksillä. Jos huomaat tämän, pyydä heitä vain muuttamaan etäisyyttä, mutta pitämään nopeus samana kuin se oli kokeilussa alkuperäisellä 500 mm:n etäisyydellä. Tällä tavoin he voivat verrata samaa nopeutta eri ajomatkoille nähdäkseen, vaikuttaako robotin ajoetäisyys myös pallon matkaan.
Vaihe 6: Testaa energian siirtyminen törmäysten aikana

Keilailuhaasteen testialue robotilla ja pallolla
Keskitä pallo 50 cm:n vaakasuoralle viivalle ja aseta robotti niin, että sen etuosa on 0 cm:n vaakaviivan keskellä. Varmista, että robotin etuosa on pallon suuntaan. Suorita ensimmäinen Momentum-projektisi, jonka nopeus on asetettu 50 %:iin, ja ole tarkkana, kun robotti törmää pallon kanssa.
Kirjaa asetettu nopeus, ajettu matka ja pallon kulkema matka tähän tietotaulukkoon (Google / .pdf). Taulukon ensimmäinen rivi on aloitettu sinulle edellisessä vaiheessa työstämäsi Momentum-projektin perusteella. Jatka tietojen lisäämistä tähän taulukkoon, kun yrität asettaa eri nopeuksia. Voit sitten lisätä muiden ryhmien tietoja, kun keskustelet havainnoistasi luokassa.
![]() Opettajan vinkkejä
Opettajan vinkkejä
-
Valmistele alue, jossa pallo pomppii eri suuntiin eri etäisyyksillä. Sulje ovet ja/tai ikkunat tarvittaessa.
-
Exploring Velocityn taulukko voidaan tallentaa alhaalta tai opiskelijat voivat luoda taulukon uudelleen suunnittelumuistikirjoissaan.
-
Ryhmän suunnittelumuistikirjojen arviointirubriikki löytyy täältä (Google / .docx / .pdf), ja rubriikki yksittäisten muistikirjojen arviointiin löytyy täältä (Google / .docx / . pdf). Aina kun aiot arvioida opiskelijoiden työtä rubriikilla, muista jakaa rubriikki heidän kanssaan ennen kuin he alkavat työskennellä projektin parissa.

Mieti ja vastaa alla oleviin kysymyksiin suunnittelumuistikirjassasi, kun keräät tietojasi:
-
Mistä voit kertoa, että robotin liikemäärä siirsi energiaa palloon törmäyksen aikana? Selitä yksityiskohtaisesti.
-
Toista testi vielä vähintään kaksi kertaa. Kokeile nopeutta alle 50 %. Palauta pallo paikoilleen ja kirjaa taulukkoon, kuinka pitkälle pallo kulkee. Kokeile myös yli 50 %:n nopeutta. Palauta pallo paikoilleen ja kirjaa taulukkoon, kuinka pitkälle pallo kulkee.
-
Kun kaikki ryhmät ovat suorittaneet kolme testiään, keskustelkaa muiden ryhmien valitsemista nopeuksista ja kuinka pitkälle pallo kulki heidän testeissään. Kun tiimit jakavat tietonsa, lisää havainnot taulukkoosi.
-
Etsi tiedoista kuvioita. Suureneeko vai pieneneekö pallon kulkema matka asetetun nopeuden kasvaessa?
![]() Opettajan työkalupakki
-
vastauksia
Opettajan työkalupakki
-
vastauksia
-
Pallon liike on todiste siitä, että robotti siirsi energiaa törmäyksen aikana. Oppilaat voivat myös kuvata todisteeksi pallon nopeutta törmäyksen jälkeen tai sen kulkusuuntaa.
-
Pallon kulkema matka riippuu käytetyn pallon massasta/painosta ja robotille asetetusta nopeudesta.
-
Opiskelijoiden tulee ymmärtää, että suuremmat nopeudet johtavat pallon kulkemaan kauemmas kuin pienemmät nopeudet. Yhdistä tämä nimenomaisesti robotin vauhtiin. Korosta, että robotin paino ei ole muuttunut, vain sen nopeus, mutta molemmat vaikuttavat robotin vauhtiin. Kysy heiltä, luulevatko pallo kulkevan niin pitkälle, jos robotti olisi raskaampi. Oletettavasti olisi. Pallon massan vaikutuksista törmäyksen aikana kerrotaan lisää seuraavassa käsittelyssä.
-
Opiskelijaryhmät ovat saattaneet valita laajasti vaihtelevia nopeuksia, mutta yleisenä oppimistavoitteena on, että opiskelijat ymmärtävät, että suuremmat nopeudet johtavat suurempaan liikemäärään, joka siirtää enemmän energiaa palloon törmäysten aikana.