
Khám phá vận tốc - Python
![]() Hộp công cụ giáo viên
Hộp công cụ giáo viên
-
Sơ lược hoạt động
Hoạt động khám phá này trước tiên sẽ giới thiệu cho học sinh cách thiết lập vận tốc lái xe và sau đó yêu cầu các em khám phá cách vận tốc của rô-bốt ảnh hưởng đến động lượng của nó. Nhấp vào đây (Google / .docx / .pdf) để xem phác thảo về hoạt động này. Hiểu được động lượng của robot sẽ là một khái niệm quan trọng để áp dụng vào trò chơi bowling Strike Challenge. -
Học sinh sẽ lập trình những gì
Sử dụng dự án mẫu Speedbot (Hệ thống truyền động 2 động cơ, Không có con quay hồi chuyển) cho phép học sinh thay đổi cài đặt tốc độ của Speedbot chỉ bằng cách thêmset_drive_velocityvào lệnhdrive_for. Phần hướng dẫn của hoạt động yêu cầu học sinh di chuyển Speedbot với nhiều vận tốc khác nhau và phần cuối của hoạt động yêu cầu học sinh áp dụng các kỹ năng lập trình vận tốc để kiểm tra động lượng và truyền năng lượng.
Speedbot đã sẵn sàng để lái xe ở các vận tốc khác nhau!
Cuộc điều tra này sẽ giúp bạn tìm hiểu thêm về lập trình Speedbot để lái xe ở tốc độ phù hợp nhất với nhiệm vụ. Trong Thử thách Tấn công ở cuối, bạn sẽ cần tìm một vận tốc cho Speedbot cho phép nó nhanh và có động lượng lớn nhưng vẫn kiểm soát được để đánh bóng ở một góc tốt và với lực lớn.
![]() Hộp công cụ giáo viên
Hộp công cụ giáo viên
Sau đây là tổng quan về Giao diện người dùng của VEXcode V5. Học sinh sẽ được giới thiệu về các tab/nút này trong các hoạt động tại Phòng thí nghiệm STEM Momentum Alley. Các liên kết cũng được cung cấp trong Phòng thí nghiệm STEM để cung cấp thêm thông tin về các tab/nút này. 
Hướng dẫn Python VEXcode V5 sẽ được sử dụng trong phần đầu tiên của cuộc điều tra này:
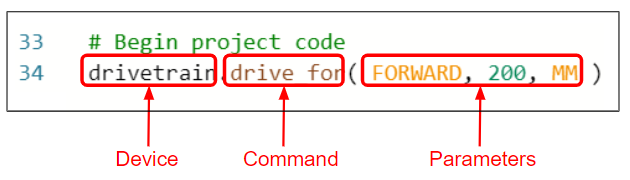
- drivetrain.set_drive_velocity(50, PHẦN TRĂM)
- drivetrain.drive_for(CHUYỂN TIẾP, 200, MM)
-
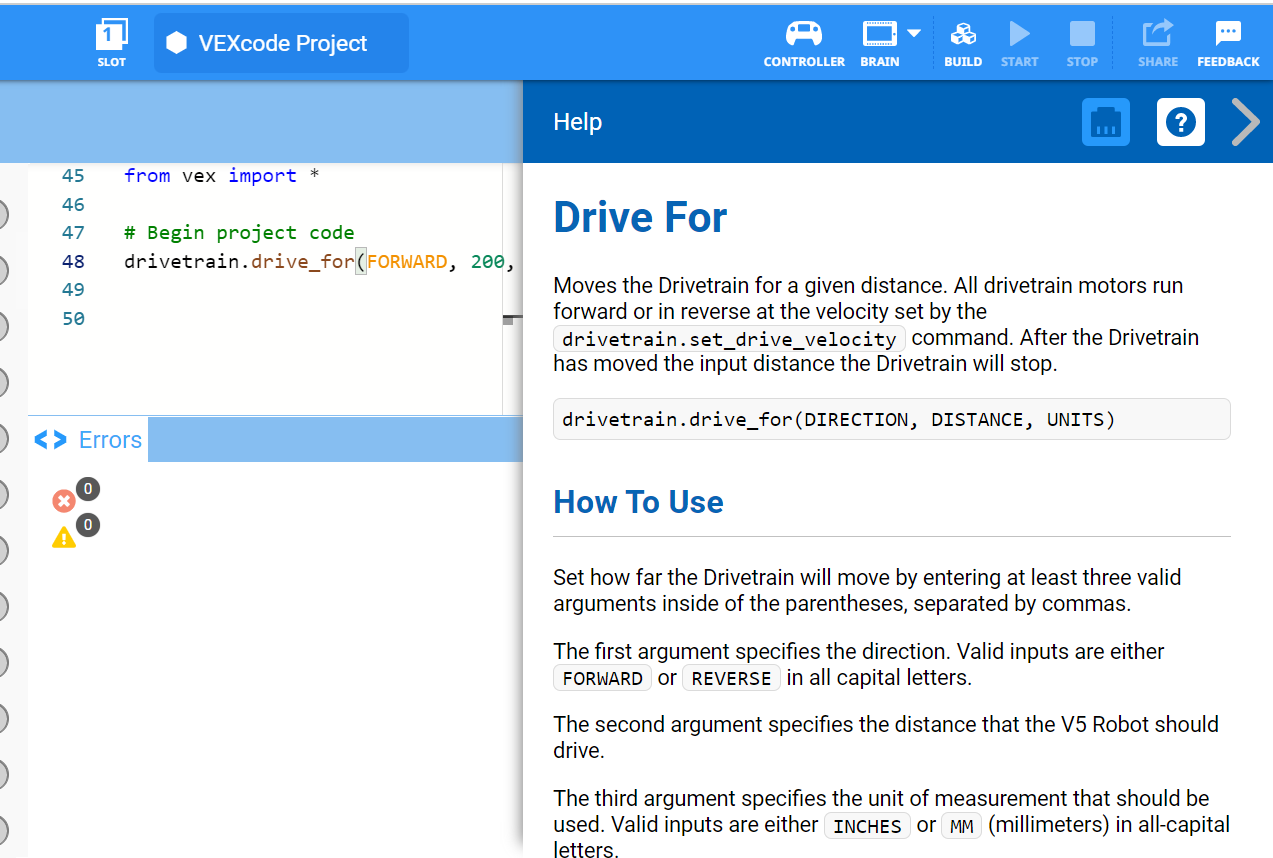
Để tìm hiểu thêm thông tin về một hướng dẫn, hãy chọn Trợ giúp và sau đó chọn biểu tượng dấu chấm hỏi bên cạnh một hướng dẫn để xem thêm thông tin.
Hãy đảm bảo bạn đã tải xuống và sẵn sàng phần cứng cần thiết, sổ tay kỹ thuật và VEXcode V5.
![]() Mẹo dành cho giáo viên
Mẹo dành cho giáo viên
Nếu đây là lần đầu tiên học viên sử dụng VEXcode V5, họ có thể tham khảo Hướng dẫn bất kỳ lúc nào trong quá trình khám phá này. Phần Hướng dẫn nằm trên Thanh công cụ. 
Mỗi nhóm sinh viên nên nhận được phần cứng cần thiết và sổ ghi chép kỹ thuật của nhóm. Sau đó mở VEXcode V5.
| Số lượng | Vật liệu cần thiết |
|---|---|
| 1 |
Robot Speedbot |
| 1 |
Pin Robot đã sạc |
| 1 |
VEXcode V5 |
| 1 |
Cáp USB (nếu sử dụng máy tính) |
| 1 |
Sổ tay kỹ thuật |
| 1 |
Quả bóng (kích thước và hình dạng của quả bóng đá) |
| 1 |
Không gian trống 3m x 3m |
| 1 |
Gậy đo hoặc thước đo |
| 1 |
Cuộn băng dính |
| 1 |
![]() Mẹo dành cho giáo viên
Mẹo dành cho giáo viên
Làm mẫu từng bước khắc phục sự cố cho học sinh.
Bước 2: Bắt đầu một dự án mới
Hoàn thành các bước sau để bắt đầu dự án:
-
Mở menu Tệp và chọn Mở Ví dụ.

-
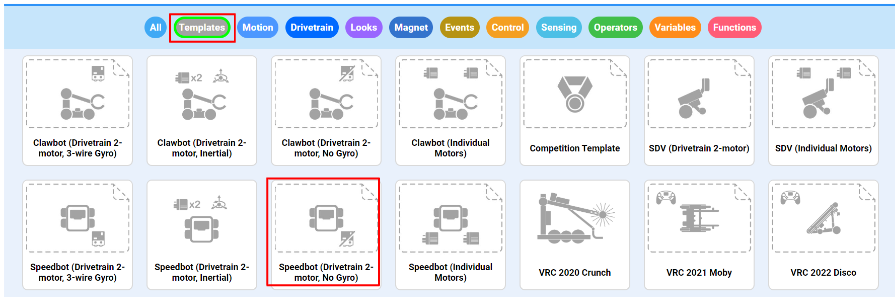
Chọn và mở dự án mẫu Speedbot (Drivetrain 2-motor, No Gyro). Dự án mẫu chứa cấu hình động cơcủa Speedbot. Nếu mẫu không được sử dụng, robot của bạn sẽ không chạy dự án một cách chính xác.
-
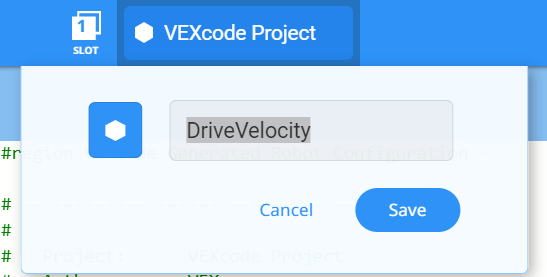
Vì bạn sẽ khám phá vận tốc nên bạn sẽ đặt tên cho dự án của mìnhDriveVelocity. Khi hoàn tất, chọnLưu.
![]() Mẹo dành cho giáo viên
Mẹo dành cho giáo viên
-
Tên dự án có thể có khoảng cách giữa hoặc sau các từ.

- Bạn có thể yêu cầu học sinh thêm chữ cái đầu hoặc tên nhóm của mình vào tên dự án. Điều này sẽ giúp phân biệt các dự án nếu bạn yêu cầu học sinh nộp chúng.
- Vì đây là hoạt động lập trình đầu tiên mà học sinh của bạn có thể thử, bạn nên làm mẫu các bước, sau đó yêu cầu học sinh thực hiện các hành động tương tự. Sau đó, giáo viên nên theo dõi học sinh để đảm bảo rằng các em đang thực hiện đúng các bước.
- Đảm bảo rằng học sinh đã chọn Mở ví dụ từ menu Tệp.
- Đảm bảo rằng học sinh đã chọn dự án mẫu Speedbot (Hệ thống truyền động 2 động cơ, Không có con quay hồi chuyển).
- Bạn có thể chỉ cho học sinh biết rằng có một số lựa chọn để chọn trên trang Ví dụ. Khi xây dựng và sử dụng các robot khác, trẻ sẽ có cơ hội sử dụng các mẫu khác nhau.
- Kiểm tra để đảm bảo tên dự án DriveVelocityhiện nằm trong cửa sổ ở giữa Thanh công cụ.

![]() Hộp công cụ giáo viên
-
Lưu dự án
Hộp công cụ giáo viên
-
Lưu dự án
-
Chỉ ra rằng khi họ mở VEXcode V5 lần đầu, cửa sổ được gắn nhãn là VEXcode Project. VEXcode Project là tên dự án mặc định khi VEXcode V5 được mở lần đầu tiên. Sau khi dự án được đổi tên thành Drive và lưu, màn hình sẽ được cập nhật để hiển thị tên dự án mới. Sử dụng cửa sổ này trên thanh công cụ, bạn có thể dễ dàng kiểm tra xem học sinh có đang sử dụng đúng dự án hay không.
-
Nói với học sinh rằng bây giờ các em đã sẵn sàng bắt đầu dự án đầu tiên của mình. Giải thích cho học sinh rằng chỉ cần làm theo một vài bước đơn giản, các em sẽ có thể tạo và chạy một dự án giúp Speedbot phát triển.
-
Nhắc nhở học sinh lưu dự án của mình khi đang làm bài. Phần Pythontừ Thư viện VEX giải thích các phương pháp lưu trong VEXcode V5.
![]() Hộp công cụ giáo viên
-
Dừng lại và thảo luận
Hộp công cụ giáo viên
-
Dừng lại và thảo luận
Đây là thời điểm thích hợp để dừng lại và yêu cầu học sinh xem lại các bước vừa hoàn thành khi bắt đầu một dự án mới trong VEXcode V5 theo cá nhân hoặc theo nhóm. Yêu cầu học sinh suy nghĩ riêng trước khi chia sẻ trong nhóm hoặc trước cả lớp.
Bước 3: Lái xe về phía trước 150 mm ở các vận tốc khác nhau
Bạn chưa sẵn sàng để bắt đầu lập trình cho robot di chuyển về phía trước với nhiều vận tốc khác nhau!
- Trước khi bắt đầu lập trình, chúng ta cần hiểu hướng dẫn là gì. Có ba phần trong một hướng dẫn.
-
Thêm các hướng dẫn vào dự án, để dự án của bạn trông như thế này:
# Thư viện nhập từ nhập vex * # Bắt đầu mã dự án drivetrain.drive_for (FORWARD, 150, MM) drivetrain.set_drive_velocity (25, PERCENT ) drivetrain.drive_for (FORWARD, 150, MM ) drivetrain.set_drive_velocity (75, PERCENT) drivetrain.drive_for(FORWARD, 150, MM)
![]() Mẹo dành cho giáo viên
Mẹo dành cho giáo viên
Lưu ý rằng hướng dẫn thứ hai và thứ ba (Dòng 33 và 34 trong hình ảnh trên) giống với hướng dẫn thứ tư và thứ năm (Dòng 35 và 36 ở trên), nhưng có tham số vận tốc khác nhau. Sau khi thêm hướng dẫn thứ ba, học sinh có thể đánh dấu các dòng cần lặp lại và sao chép, dán chúng để hoàn thành dự án. Sau đó, họ có thể thay đổi vận tốc ở dòng thứ tư thành 75 phần trăm.
-
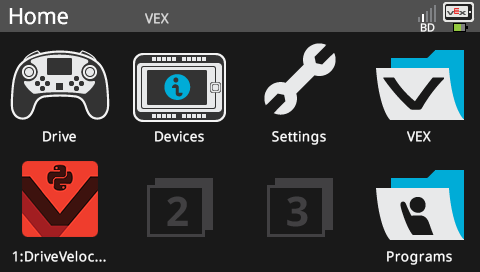
Chọn biểu tượng Slot để chọn một trong tám vị trí có sẵn trên Robot Brain và chọn vị trí 1.

-
Kết nối Robot Brain V5 với máy tính bằng cáp micro USB và cấp nguồn cho Robot Brain V5. Biểu tượng Não trên thanh công cụchuyển sang màu xanh lákhi kết nối thành công.

-
ChọnTải xuốngđể tải dự án xuống Brain.

![]() Hộp công cụ giáo viên
Hộp công cụ giáo viên
- Nhắc nhở học sinh ngắt kết nối cáp USB khỏi Robot Brain. Việc kết nối robot với máy tính trong khi chạy một dự án có thể khiến robot kéo cáp kết nối.
-
Kiểm tra để đảm bảo dự án của bạn đã được tải xuống (Python) bằng cách nhìn vào màn hình Robot Brain. Tên dự án DriveVelocity nên được liệt kê trong Vùng 1.
![]() Hộp công cụ giáo viên
Hộp công cụ giáo viên
-
Dừng lại và thảo luận
Yêu cầu học sinh dự đoán những gì các em nghĩ sẽ xảy ra khi dự án này được tải xuống và chạy trên robot Speedbot. Yêu cầu học sinh ghi lại dự đoán của mình vào sổ tay kỹ thuật. Nếu có thời gian, hãy yêu cầu mỗi nhóm chia sẻ dự đoán của mình.Học sinh phải dự đoán rằng Speedbot sẽ di chuyển về phía trước với tốc độ mặc định (50%), sau đó chậm hơn (25%) so với tốc độ mặc định và cuối cùng là nhanh hơn (75%) so với tốc độ mặc định.
-
Mô hình đầu tiên
Mô hình chạy dự án trước lớp trước khi yêu cầu tất cả học sinh thử cùng một lúc. Tập hợp học sinh vào một khu vực và chừa đủ không gian để Speedbot có thể di chuyển nếu nó được đặt trên sàn.Nói với học sinh rằng bây giờ đến lượt các em thực hiện dự án của mình. Hãy đảm bảo rằng chúng có đường đi thông thoáng và không có Speedbot nào đâm vào nhau.
-
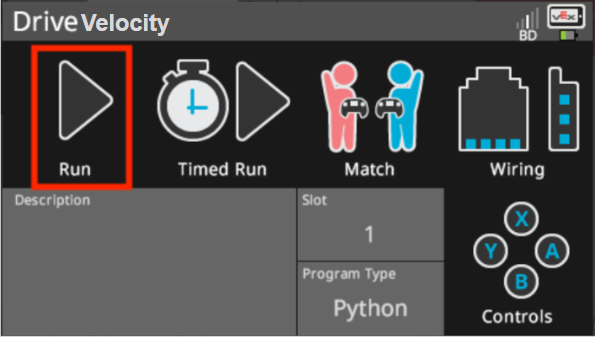
Chạy (Python) dự án trên robot bằng cách đảm bảo dự án được chọn và sau đó nhấn nútChạytrên Robot Brain. Chúc mừng bạn đã tạo dự án đầu tiên!
Bước 4: Lái tới và lùi 150 mm ở các vận tốc khác nhau
Bây giờ bạn đã lập trình robot của mình để lái xe về phía trước ở các vận tốc khác nhau, hãy lập trình nó để bây giờ lái xe về phía trước và ngược lại ở các vận tốc khác nhau.
-
Thay đổi tham số trong lệnhdrive_forthứ hai thành REVERSE, để dự án của bạn trông như thế này:
# Thư viện nhập từ nhập vex * # Bắt đầu mã dự án drivetrain.drive_for (FORWARD, 150, MM) drivetrain.set_drive_velocity (25, PERCENT ) drivetrain.drive_for (REVERSE, 150, MM ) drivetrain.set_drive_velocity (75, PERCENT) drivetrain.drive_for(FORWARD, 150, MM) -
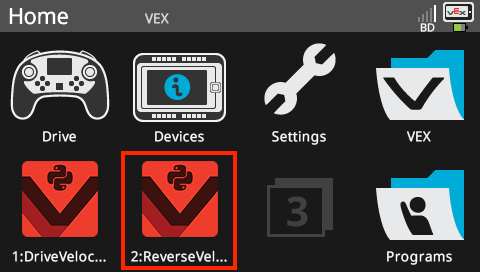
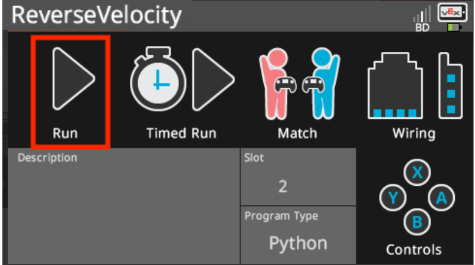
Chọn Tên Dự án để thay đổi nó từ DriveVelocity thành ReverseVelocity.

-
Chọn biểu tượng Slot để chọn một slot mới. Chọn vị trí 2.

-
Tải xuống (Python) dự án.

-
Kiểm tra để đảm bảo dự án của bạn đã được tải xuống (Python) bằng cách nhìn vào màn hình Robot Brain. Tên dự án ReverseVelocity nên được liệt kê trong Khe 2.
-
Chạy (Python) dự án trên robot bằng cách đảm bảo dự án được chọn và sau đó nhấn nútChạytrên Robot Brain.
![]() Hộp công cụ giáo viên
-
Hoàn thành Bước 4
Hộp công cụ giáo viên
-
Hoàn thành Bước 4
-
Để thay đổi lệnh drive_fortừforwardthànhreverse, chỉ cần thay đổi tham số đầu tiên thành REVERSE. Điều này sẽ khiến các động cơ trong hệ thống truyền động di chuyển theo hướng ngược lại.
-
Số mm có thể thay đổi, nhưng trong ví dụ này chúng ta sẽ giữ nguyên ở mức 150 mm như đã thiết lập ở bước trước.
-
Nhắc nhở học sinh ngắt kết nối cáp USB khỏi Robot Brain trước khi chạy dự án.
-
Nhắc nhở học sinh lưu dự án của mình khi đang làm bài. Thư viện VEX có một phần dành chogiải thích về các phương pháp lưu trong VEXcode V5.
![]() Mẹo dành cho giáo viên
Mẹo dành cho giáo viên
Yêu cầu các đội chia sẻ khu vực thử nghiệm và bóng nếu cần, nhưng cũng có thể thiết lập nhiều khu vực thử nghiệm, mỗi khu vực có bóng riêng. Quyết định xem bạn có muốn thiết lập khu vực kiểm tra hay muốn học sinh tự làm việc đó.
Bước 5: Thiết lập khu vực xét nghiệm của bạn
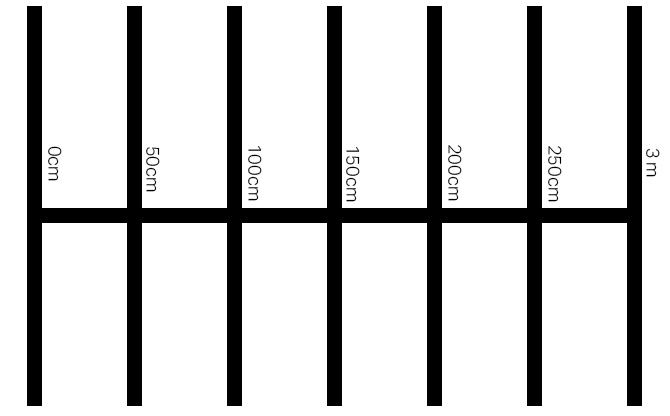
- Sử dụng băng dính và que đo để tạo thành một đường thẳng dài 3m trên sàn giống như đường ngang thể hiện trong hình trên.
- Sau khi đường thẳng được tạo, hãy sử dụng băng dính và thanh đo của bạn một lần nữa để tạo ra các đường thẳng dài 1m trên đường thẳng 3m giống như các đường thẳng đứng trong hình trên. Dán một vạch 1m ở mỗi vạch 50cm trên đường thẳng đứng bằng cách bắt đầu từ 0cm.
- Các đường ngang ngắn hơn nên được căn giữa trên đường dọc dài hơn.
- Trong khi khu vực này đang được thiết lập, một hoặc hai thành viên trong nhóm của bạn nên tạo một dự án mới có tên là Momentum. Đặt vận tốc ở mức 50% và để Speedbot lái về phía trước đến vạch đầu tiên ở 50 cm. Hãy nhớ 1 cm = 10 mm, vì vậy robot sẽ di chuyển về phía trước trong 50 cm hoặc 500 mm.
![]() Hộp công cụ dành cho giáo viên
-
Tại sao lại có hoạt động này?
Hộp công cụ dành cho giáo viên
-
Tại sao lại có hoạt động này?
-
Thu thập và phân tích dữ liệu, thậm chí là nhận dạng mẫu đơn giản, đều là những kỹ năng khoa học cơ bản. Hoạt động này bổ sung cấu trúc cho quá trình phân tích dữ liệu bằng cách ngăn ngừa những sai lầm phổ biến.
-
Lưu ý rằng hướng dẫn không yêu cầu học sinh thay đổi khoảng cách di chuyển của robot cùng với việc thay đổi vận tốc của robot. Đây là ứng dụng có chủ đích của cái mà các nhà khoa học gọi là Chiến lược Kiểm soát Biến số. Việc hướng dẫn các nhà điều tra mới vào nghề cách thao tác từng biến một (tức là vận tốc trong trường hợp này) để xác định ảnh hưởng của nó đến biến thứ hai (tức là khoảng cách quả bóng di chuyển sau va chạm) là rất quan trọng vì đây không nhất thiết là cách tiếp cận mà học sinh sẽ áp dụng một cách tự phát thay vì cách tiếp cận đoán và kiểm tra. Các phương pháp đoán và kiểm tra thông thường thường thao tác nhiều biến cùng một lúc (tức là thay đổi cả vận tốc và khoảng cách mà robot di chuyển) và quan sát tác động của sự hợp lưu lên khoảng cách mà quả bóng di chuyển sau khi quay. Hoạt động này cố gắng hướng dẫn học sinh tránh điều đó vì mối quan hệ giữa các biến sẽ trở nên mơ hồ. Có phải tốc độ của robot cao hơn, khoảng cách robot di chuyển xa hơn hay cả hai khiến quả bóng di chuyển xa hơn? Chúng ta không thể trả lời câu hỏi đó khi chúng ta thao tác cả hai biến cùng một lúc.
-
Tuy nhiên, các nhóm có thể tự ý thử lái robot đi những khoảng cách khác nhau. Nếu bạn quan sát thấy điều này, hãy yêu cầu họ chỉ thay đổi khoảng cách nhưng vẫn giữ nguyên vận tốc như trong lần thử nghiệm với khoảng cách ban đầu là 500mm. Theo cách đó, họ có thể so sánh cùng một vận tốc với các khoảng cách lái khác nhau để xem liệu khoảng cách lái của robot có ảnh hưởng đến quãng đường bóng di chuyển hay không.
Bước 6: Kiểm tra việc truyền năng lượng trong quá trình va chạm
 Khu vực kiểm tra thử thách
Khu vực kiểm tra thử thách Khu vực kiểm tra thử thách bowling với robot và bóng
Định tâm quả bóng trên đường ngang ở mức 50cm và đặt robot của bạn sao cho mặt trước của nó được định tâm trên đường ngang ở mức 0cm. Đảm bảo mặt trước của robot hướng về phía quả bóng. Chạy dự án Momentum đầu tiên của bạn với vận tốc được đặt ở mức 50% và chú ý kỹ khi robot va chạm với quả bóng.
Ghi lại vận tốc đã đặt, quãng đường di chuyển và quãng đường quả bóng di chuyển trong Bảng dữ liệu này (Google / .pdf). Hàng đầu tiên của bảng đã được bắt đầu cho bạn dựa trên dự án Momentum mà bạn đã làm ở bước trước. Tiếp tục thêm dữ liệu vào bảng này khi bạn thử đặt các vận tốc khác nhau. Sau đó, bạn có thể thêm dữ liệu của các nhóm khác khi cùng cả lớp thảo luận về những phát hiện của mình.
![]() Mẹo dành cho giáo viên
Mẹo dành cho giáo viên
-
Chuẩn bị khu vực để bóng có thể nảy theo nhiều hướng khác nhau với khoảng cách khác nhau. Đóng cửa ra vào và/hoặc cửa sổ khi cần thiết.
-
Bảng Khám phá vận tốc có thể được lưu ở bên dưới hoặc học sinh có thể tạo lại bảng này trong sổ tay kỹ thuật của mình.
-
Tiêu chí đánh giá sổ tay kỹ thuật nhóm có thể được tìm thấy tại đây (Google / .docx / .pdf) và tiêu chí đánh giá sổ tay cá nhân có thể được tìm thấy tại đây (Google / .docx / .pdf). Bất cứ khi nào bạn có kế hoạch đánh giá bài làm của học sinh bằng một hoặc nhiều tiêu chí, hãy nhớ chia sẻ tiêu chí đó với các em trước khi các em bắt đầu làm dự án.

Hãy suy nghĩ và trả lời các câu hỏi dưới đây trong sổ ghi chép kỹ thuật của bạn khi bạn thu thập dữ liệu của mình:
- Làm thế nào bạn có thể biết rằng động lượng của robot đã truyền năng lượng cho quả bóng trong vụ va chạm? Giải thích chi tiết.
- Lặp lại xét nghiệm ít nhất hai lần nữa. Hãy thử vận tốc dưới 50%. Đặt lại bóng ở vị trí của nó và ghi lại trong bảng khoảng cách mà quả bóng di chuyển. Ngoài ra, hãy thử vận tốc lớn hơn 50%. Đặt lại bóng ở vị trí của nó và ghi lại trong bảng khoảng cách mà quả bóng di chuyển.
- Khi tất cả các nhóm đã hoàn thành ba bài kiểm tra, hãy thảo luận về vận tốc mà các nhóm khác đã chọn và quả bóng đã đi được bao xa trong các bài kiểm tra của họ. Khi các nhóm chia sẻ dữ liệu của họ, hãy thêm những phát hiện của họ vào bảng của bạn.
- Tìm (các) mẫu trong dữ liệu. Khoảng cách di chuyển của quả bóng tăng hay giảm khi vận tốc thiết lập tăng?
![]() Hộp công cụ giáo viên
-
Câu trả lời
Hộp công cụ giáo viên
-
Câu trả lời
-
Chuyển động của quả bóng là bằng chứng cho thấy robot đã truyền năng lượng trong quá trình va chạm. Học sinh cũng có thể mô tả tốc độ của quả bóng sau khi va chạm hoặc hướng di chuyển của nó để làm bằng chứng.
-
Khoảng cách mà quả bóng di chuyển phụ thuộc vào khối lượng/trọng lượng của quả bóng được sử dụng và vận tốc được thiết lập cho robot.
-
Học sinh cần nhận ra rằng vận tốc cao hơn sẽ khiến quả bóng bay xa hơn so với vận tốc thấp hơn. Kết nối rõ ràng điều này với động lượng của robot. Nhấn mạnh rằng trọng lượng của robot không thay đổi, chỉ có vận tốc của nó thay đổi, nhưng cả hai đều góp phần tạo nên động lượng của robot. Hỏi họ xem họ có nghĩ quả bóng có thể bay xa được không nếu robot nặng hơn. Có lẽ là vậy. Bài đọc tiếp theo sẽ cung cấp thêm thông tin về tác động của khối lượng quả bóng trong quá trình va chạm.
-
Các nhóm học sinh có thể đã chọn các vận tốc thay đổi rộng rãi nhưng mục tiêu học tập chung là để học sinh nhận ra rằng vận tốc cao hơn dẫn đến động lượng lớn hơn, truyền nhiều năng lượng hơn cho quả bóng trong quá trình va chạm.