
![]() Инструментарий учителя
Инструментарий учителя
-
План занятия
В ходе этого исследования учащиеся сначала познакомятся с установкой скорости вождения, а затем попросят их изучить, как скорость робота влияет на его импульс. Нажмите здесь (Google ), чтобы просмотреть схему этого мероприятия. Понимание инерции робота станет важной концепцией, применимой к игре в боулинг Strike Challenge. -
Что будут программировать учащиеся
Использование шаблонного проекта Speedbot (трансмиссия, 2 двигателя, без гироскопа) позволяет учащимся изменять настройки скорости Speedbot, просто добавляя set_drive_velocity к Drive_for инструкция. В управляемой части занятия учащиеся перемещают Speedbot с разной скоростью, а в конце упражнения им предлагается применить свои навыки программирования скорости для испытаний на передачу импульса и энергии.
Спидбот готов двигаться с разной скоростью!
Это исследование поможет вам узнать больше о программировании Speedbot для движения на скоростях, которые лучше всего подходят для выполнения этой задачи. В конце Strike Challenge вам нужно будет найти скорость для Speedbot, которая позволит ему быть быстрым и иметь большой импульс, но при этом сохранять контроль, чтобы ударить по мячу под хорошим углом и с большой силой.
![]() Инструментарий учителя
Инструментарий учителя
Ниже представлен обзор пользовательского интерфейса VEXcode V5. Учащиеся познакомятся с этими вкладками/кнопками во время занятий в лаборатории STEM Momentum Alley. В STEM Lab также предоставляются ссылки для получения дополнительной информации об этих вкладках/кнопках. 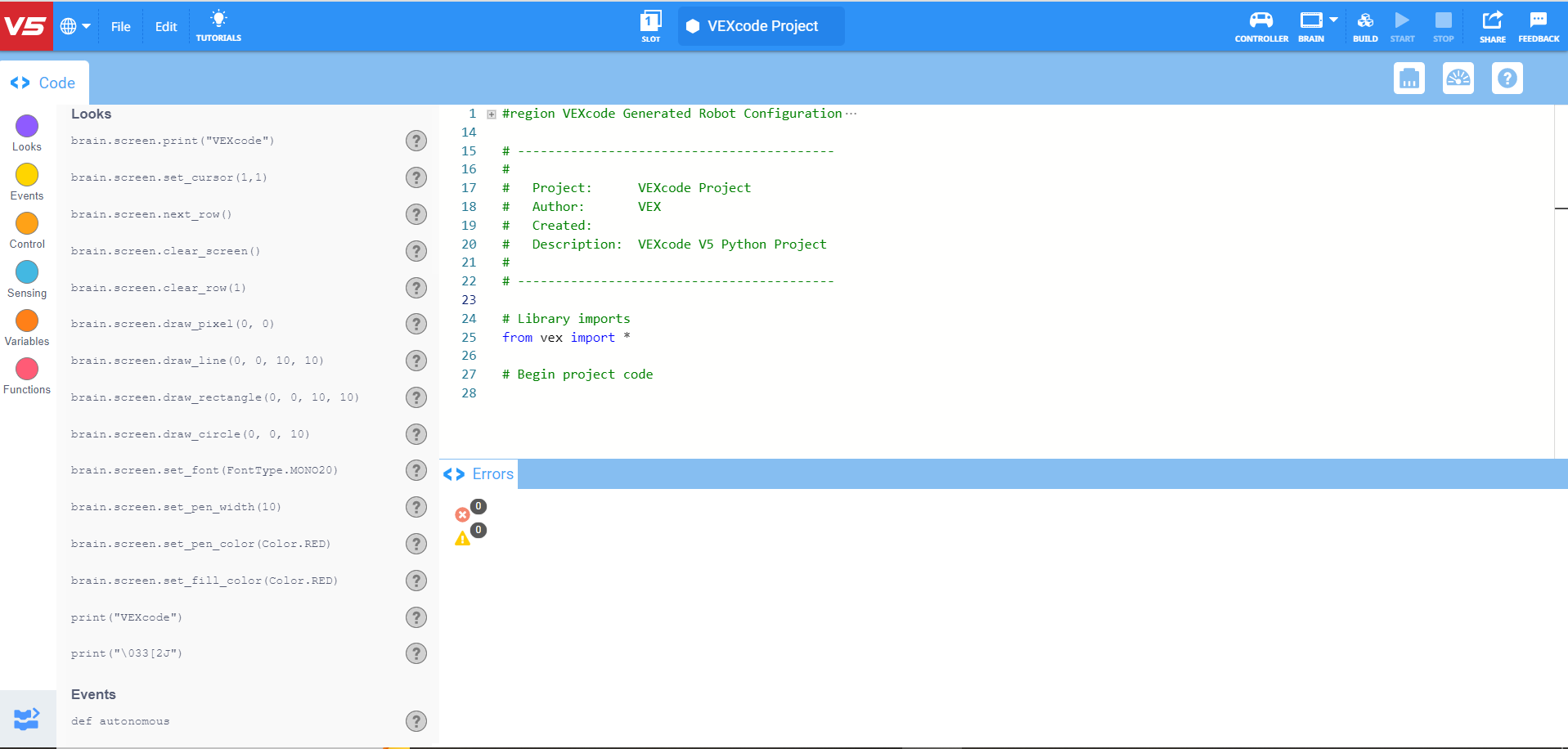
Инструкции VEXcode V5 Python, которые будут использоваться в первой части этого исследования:
-
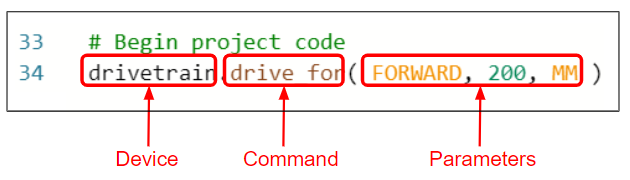
Drivetrain.set_drive_velocity(50, ПРОЦЕНТ)
-
Drivetrain.drive_for(ВПЕРЕД, 200, ММ)
-
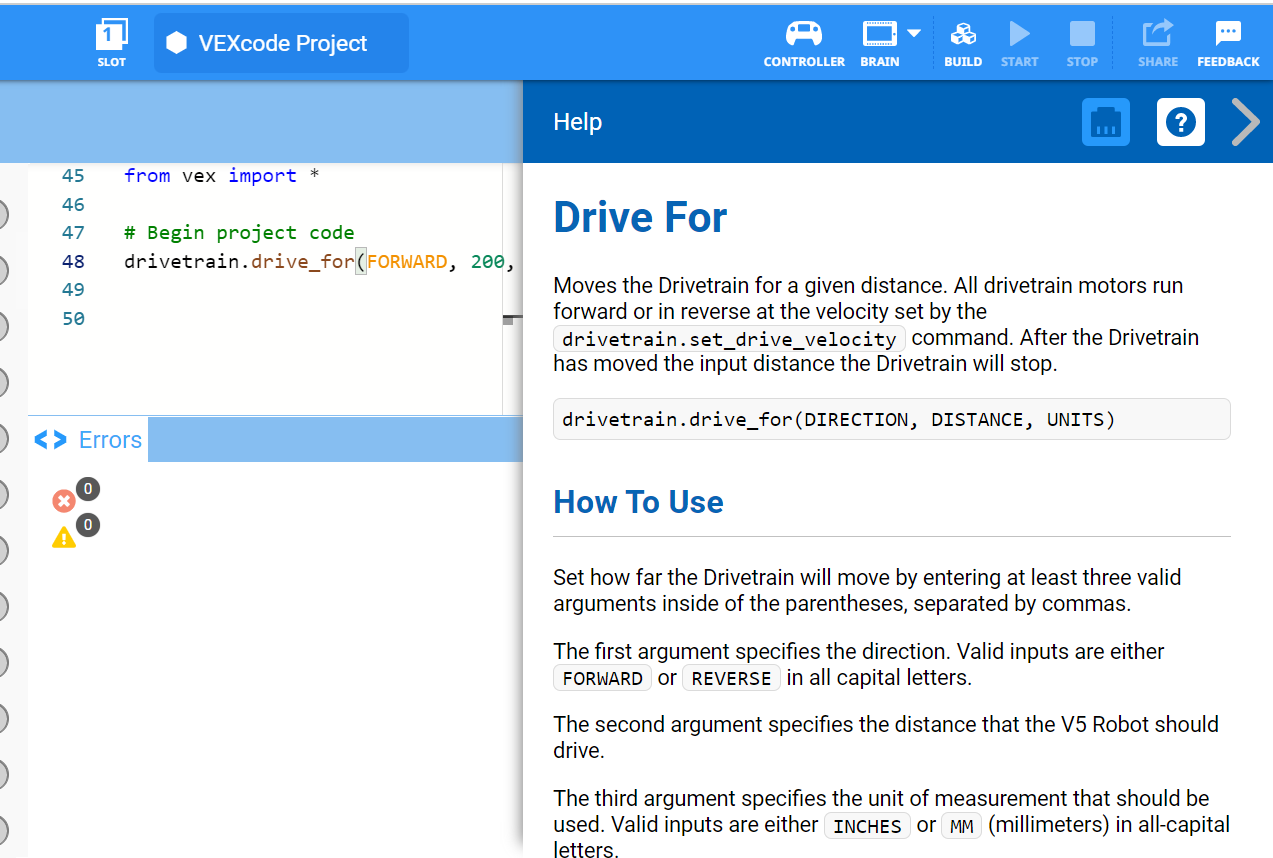
Чтобы получить дополнительную информацию об инструкции, выберите «Справка», а затем выберите значок вопросительного знака рядом с инструкцией, чтобы просмотреть дополнительную информацию.
Убедитесь, что у вас есть необходимое оборудование, ваш инженерный блокнот и VEXcode V5 , загруженный и готовый.
![]() Советы учителям
Советы учителям
Если учащийся впервые использует VEXcode V5, он может обратиться к учебникам в любой момент во время изучения. Учебники расположены на панели инструментов. 
Каждая группа студентов должна получить необходимое оборудование и инженерную тетрадь группы. Затем откройте VEXcode V5.
| Количество | Необходимые материалы |
|---|---|
| 1 |
Спидбот Робот |
| 1 |
Заряженная батарея робота |
| 1 |
VEXкод V5 |
| 1 |
USB-кабель (при использовании компьютера) |
| 1 |
Инженерный блокнот |
| 1 |
Мяч (размер и форма футбольного мяча) |
| 1 |
Свободное пространство 3х3 метра. |
| 1 |
Метровая палочка или линейка |
| 1 |
Рулон ленты |
| 1 |
![]() Советы учителям
Советы учителям
Смоделируйте для учащихся каждый шаг по устранению неполадок.
Шаг 2. Начните новый проект
Чтобы начать проект, выполните следующие шаги:
-
Откройте меню «Файл» и выберите «Открыть примеры».

-
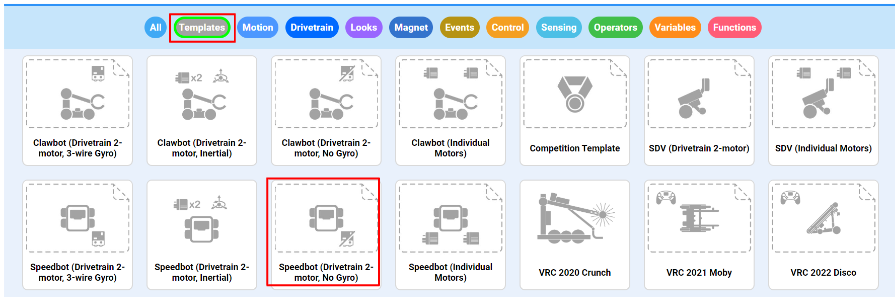
Выберите и откройте проект шаблона Speedbot (трансмиссия, 2 двигателя, без гироскопа). Шаблон проекта содержит конфигурацию двигателя Speedbot . Если шаблон не используется, ваш робот не сможет корректно запустить проект.
-
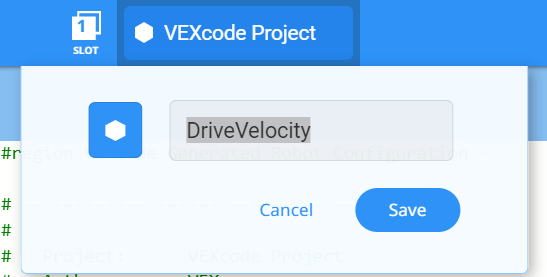
Поскольку вы будете работать над изучением скорости, вы назовете свой проект DriveVelocity. По завершении выберите Сохранить.
![]() Советы учителям
Советы учителям
-
Имена проектов могут содержать пробелы между словами или после них.

-
Вы можете попросить учащихся добавить к названию проекта свои инициалы или название своей группы. Это поможет дифференцировать проекты, если вы попросите учащихся представить их.
-
Поскольку это первое задание по программированию, которое могут попробовать ваши ученики, вам следует смоделировать шаги, а затем попросить учащихся выполнить те же действия. Затем учитель должен следить за учениками, чтобы убедиться, что они правильно выполняют шаги.
-
Убедитесь, что учащиеся выбрали «Открыть примеры» в меню «Файл».
-
Убедитесь, что учащиеся выбрали проект шаблона Speedbot (трансмиссия с 2 двигателями и без гироскопа).
-
Вы можете указать учащимся, что на странице «Примеры» можно выбрать несколько вариантов. По мере того, как они создают и используют других роботов, у них будет возможность использовать разные шаблоны.
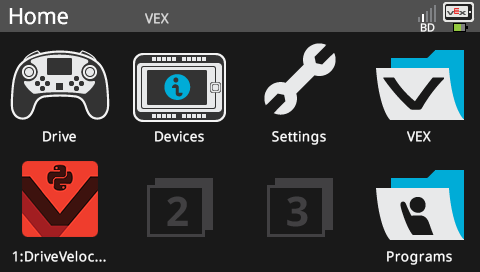
- Убедитесь, что имя проекта DriveVelocity теперь находится в окне в центре панели инструментов.

![]() Инструменты учителя
проектов
Инструменты учителя
проектов
-
Обратите внимание, что когда они впервые открыли VEXcode V5, окно было помечено как VEXcode Project. VEXcode Project — это имя проекта по умолчанию при первом открытии VEXcode V5. После того как проект был переименован в Диск и сохранен, на дисплее появилось новое имя проекта. Используя это окно на панели инструментов, можно легко проверить, используют ли учащиеся правильный проект.
-
Скажите учащимся, что теперь они готовы приступить к своему первому проекту. Объясните учащимся, что, выполнив несколько простых шагов, они смогут создать и запустить проект, который продвинет Speedbot вперед.
-
Напомните учащимся сохранять свои проекты во время работы. Раздел Python из библиотеки VEX объясняет методы сохранения в VEXcode V5.
![]() Инструментарий учителя
и обсудите
Инструментарий учителя
и обсудите
Это хороший момент, чтобы сделать паузу и предложить учащимся просмотреть только что выполненные шаги по запуску нового проекта в VEXcode V5 индивидуально или в группах. Попросите учащихся поразмышлять индивидуально, прежде чем поделиться информацией в своей группе или перед всем классом.
Шаг 3. Двигайтесь вперед на 150 мм с разными скоростями.
Вы не готовы программировать робота, чтобы он двигался вперед с разными скоростями!
- Прежде чем мы начнем программировать, нам нужно понять, что такое инструкция. Инструкция состоит из трех частей.
![]() Советы учителям
Советы учителям
Вы можете заметить функцию автозаполнения, когда начнете вводить инструкцию. Используйте клавиши «Вверх» и «Вниз», чтобы выбрать нужное имя, затем нажмите «Tab» или (Enter/Return) на клавиатуре, чтобы сделать выбор. Дополнительную информацию об этой функции можно найти в статье Python . 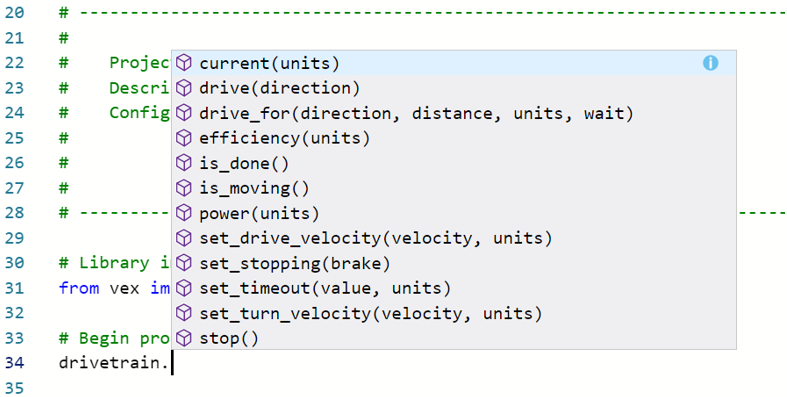
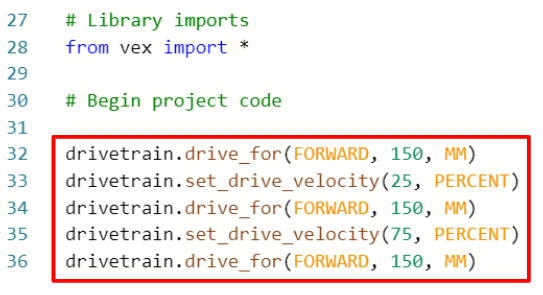
- Добавьте инструкции в проект:
![]() Советы учителям
Советы учителям
Обратите внимание, что вторая и третья инструкции (строки 33 и 34 на изображении выше) такие же, как четвертая и пятая инструкции (строки 35 и 36 выше), но с другим параметром скорости. После добавления третьих инструкций учащиеся могут выделить строки, которые нужно повторить, скопировать и вставить их для завершения проекта. Затем они могут изменить скорость в четвертой строке на 75 процентов.
-
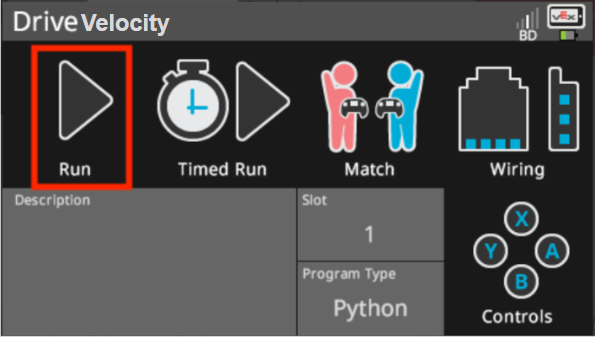
Нажмите значок «Слот», чтобы выбрать один из восьми доступных слотов «мозга робота», и выберите слот 1.

-
Подключите V5 Robot Brain к компьютеру с помощью кабеля micro USB и включите V5 Robot Brain. Значок «Мозг» на панели инструментов станет зеленым после успешного подключения.

-
Выберите Download , чтобы загрузить проект в Brain.

![]() Инструментарий учителя
Инструментарий учителя
- Напомните учащимся, что им нужно отсоединить USB-кабель от робота-мозга. Подключение робота к компьютеру во время выполнения проекта может привести к тому, что робот потянет за соединительный кабель.
-
Убедитесь, что в вашем проекте загружено (Python) , посмотрев на экран Robot Brain. Имя проекта DriveVelocity должно быть указано в слоте 1.
![]() Инструментарий учителя
Инструментарий учителя
-
Остановитесь и обсудите
Попросите учащихся спрогнозировать, что, по их мнению, произойдет, когда этот проект будет загружен и запущен на роботе Speedbot. Попросите учащихся записать свои прогнозы в свои инженерные тетради. Если позволяет время, попросите каждую группу поделиться своим предсказанием.Учащиеся должны спрогнозировать, что Speedbot сначала будет двигаться вперед со скоростью по умолчанию (50 %), затем медленнее (25 %), чем скорость по умолчанию, а затем быстрее (75 %), чем скорость по умолчанию.
-
Модель сначала
Модель запускает проект перед классом, прежде чем все учащиеся попробуют его одновременно. Соберите учеников в одном месте и оставьте достаточно места для перемещения Speedbot, если он размещен на полу.Скажите учащимся, что теперь их очередь реализовать свой проект. Убедитесь, что у них есть свободный путь и что ни один спидбот не столкнется друг с другом.
-
Запустите (Python) проект на роботе, убедившись, что проект выбран, а затем нажмите кнопку «Выполнить на Robot Brain. Поздравляем с созданием вашего первого проекта!
Шаг 4: Двигайтесь вперед и назад на 150 мм с разными скоростями.
Теперь, когда вы запрограммировали своего робота на движение вперед с разными скоростями, запрограммируйте его на движение вперед и назад с разными скоростями.
-
Измените параметр во второй инструкции Drive_for , чтобы отобразилось REVERSE.

-
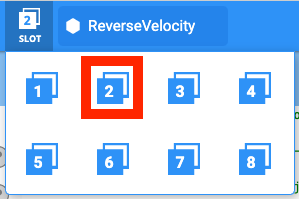
Выберите имя проекта, чтобы изменить его с DriveVelocity на ReverseVelocity.

-
Нажмите значок «Слот», чтобы выбрать новый слот. Выберите слот 2.
-
Загрузите (Python) проект.

-
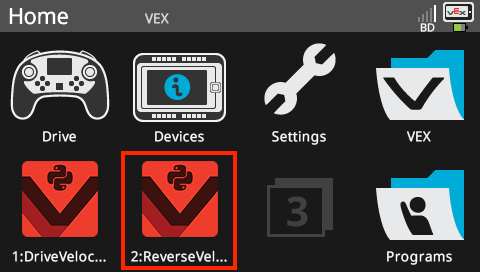
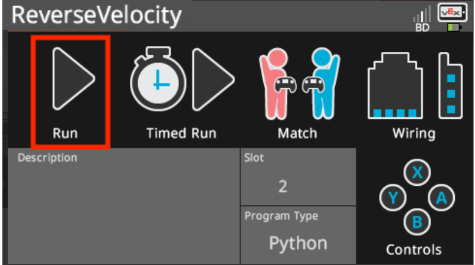
Убедитесь, что в вашем проекте загружено (Python) , посмотрев на экран Robot Brain. Имя проекта ReverseVelocity должно быть указано в слоте 2.
-
Запустите (Python) проект на роботе, убедившись, что проект выбран, а затем нажмите кнопку «Выполнить на Robot Brain.
![]() Инструментарий учителя
Завершение шага 4.
Инструментарий учителя
Завершение шага 4.
-
Чтобы изменить команду Drive_for с вперед на назад, просто измените первый параметр на REVERSE. При этом двигатели трансмиссии будут двигаться в противоположном направлении.
-
Количество мм можно изменить, но для этого примера мы оставим значение 150 мм, как установлено на предыдущем шаге.
-
Напомните учащимся, что перед запуском проекта нужно отсоединить USB-кабель от робота-мозга.
-
Напомните учащимся сохранять свои проекты во время работы. В библиотеке VEX есть раздел для Python , в котором объясняются методы сохранения в VEXcode V5.
![]() Советы учителям
Советы учителям
При необходимости попросите команды разделить зону тестирования и мяч, но можно также организовать несколько зон тестирования, каждая со своим мячом. Решите, хотите ли вы создать зону тестирования или хотите, чтобы это сделали учащиеся.
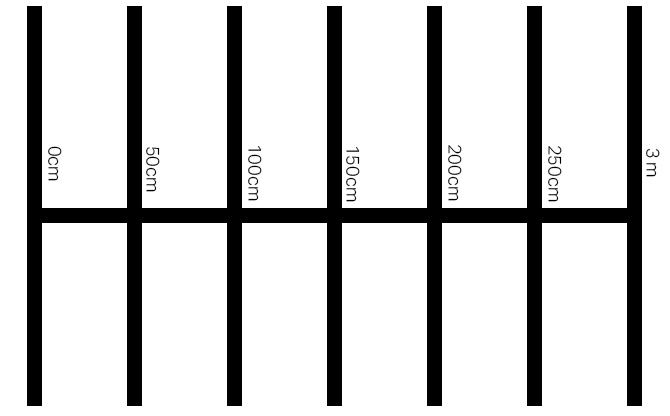
Шаг 5. Настройка зоны тестирования
-
С помощью ленты и метровой палки проведите на полу линию длиной 3 метра, подобную горизонтальной линии, показанной на изображении выше.
-
После того, как линия будет создана, еще раз используйте ленту и измерительную линейку, чтобы создать линии длиной 1 метр через 3-метровую линию, как вертикальные линии на изображении выше. Наклейте ленту линию длиной 1 м через каждые 50 см вертикальной линии, начиная с отметки 0 см.
-
Более короткие горизонтальные линии должны располагаться по центру более длинной вертикальной линии.
-
-
Пока область создается, один или два члена вашей команды должны создать новый проект под названием Momentum. Установите скорость на 50% и заставьте Speedbot проехать вперед до первой линии на 50 см. Имейте в виду, что 1 см = 10 мм, поэтому робот проедет вперед 50 см или 500 миллиметров.
![]() инструментов учителя
Зачем это занятие?
инструментов учителя
Зачем это занятие?
-
Сбор и анализ данных, даже простое распознавание образов, являются фундаментальными научными навыками. Это действие добавляет структуру анализу данных, предотвращая типичные ошибки.
-
Обратите внимание, что в инструкциях учащимся не предлагается изменять расстояние движения робота вместе с изменением скорости робота. Это намеренное применение того, что учёные-обучающиеся называют стратегией контроля переменных. Обучение начинающих следователей манипулировать одной переменной за раз (т. е. скоростью в данном случае) для определения ее влияния на вторую переменную (т. е. расстояние, которое мяч проходит после столкновения), важно, поскольку это не обязательно тот подход, который примут студенты. спонтанно, по принципу «догадайся и проверь». Типичные подходы «угадай и проверь» часто манипулируют более чем одной переменной одновременно (т. е. изменяют как скорость, так и расстояние, которое проходит робот) и наблюдают за влиянием слияния на расстояние, которое мяч проходит после вращения. Это задание пытается увести учащихся от этого, поскольку в этом случае отношения между переменными становятся неоднозначными. Что заставляет мяч двигаться дальше: более высокая скорость робота, большее расстояние, которое он проезжает, или и то, и другое? Мы не можем ответить на этот вопрос, когда манипулируем обеими переменными одновременно.
-
Однако команды могут спонтанно попытаться проехать на роботе разные расстояния. Если вы заметили это, попросите их только изменить расстояние, но сохранить скорость такой же, как и в испытании с исходным расстоянием 500 мм. Таким образом, они смогут сравнить одну и ту же скорость с разными расстояниями движения, чтобы увидеть, влияет ли расстояние движения робота на то, как далеко пролетит мяч.
Шаг 6. Проверка передачи энергии во время столкновений

Тестовая площадка для боулинга с роботом и мячом
Отцентрируйте шар на горизонтальной линии на высоте 50 см и поместите робота так, чтобы передняя часть его находилась по центру горизонтальной линии на высоте 0 см. Убедитесь, что передняя часть робота обращена в сторону мяча. Запустите свой первый проект Momentum со скоростью 50 % и обратите пристальное внимание на то, как робот сталкивается с мячом.
Запишите заданную скорость, пройденное расстояние и расстояние, пройденное мячом, в этой таблице данных (Google ). Первая строка таблицы была создана для вас на основе проекта Momentum, над которым вы работали на предыдущем шаге. Продолжайте добавлять данные в эту таблицу, пытаясь установить разные скорости. Затем вы можете добавить данные других команд, обсуждая свои выводы всем классом.
![]() Советы учителям
Советы учителям
-
Подготовьте место, где мяч будет отскакивать в разных направлениях на разные расстояния. При необходимости закройте двери и/или окна.
-
Таблицу «Изучение скорости» можно сохранить снизу или учащиеся могут воссоздать ее в своих инженерных тетрадях.
-
Критерий оценки блокнотов группового проектирования можно найти здесь (Google / .docx / .pdf), а критерий оценки отдельных блокнотов можно найти здесь (Google / .docx / . PDF). Всякий раз, когда вы планируете оценивать работу учащихся по критериям, обязательно поделитесь с ними критериями, прежде чем они начнут работать над проектом.

Подумайте и ответьте на приведенные ниже вопросы в своей инженерной тетради во время сбора данных:
-
Как вы можете сказать, что импульс робота передал энергию мячу во время столкновения? Объясните подробно.
-
Повторите тест еще как минимум дважды. Попробуйте скорость менее 50%. Верните мяч на прежнее место и запишите в таблице, какое расстояние пролетел мяч. Также попробуйте скорость более 50%. Верните мяч на прежнее место и запишите в таблице, какое расстояние пролетел мяч.
-
Когда все группы завершат свои три теста, обсудите скорости, выбранные другими группами, и расстояние, пройденное мячом в их тестах. По мере того как команды делятся своими данными, добавляйте их результаты в свою таблицу.
-
Найдите закономерности в данных. Расстояние, пройденное мячом, увеличивается или уменьшается по мере увеличения заданной скорости?
![]() Инструменты учителя
-
Ответы
Инструменты учителя
-
Ответы
-
Движение мяча является свидетельством того, что робот передал энергию во время столкновения. В качестве доказательства учащиеся также могут описать скорость мяча после удара или направление его движения.
-
Расстояние, которое проходит мяч, зависит от массы/веса используемого мяча и скорости, установленной для робота.
-
Учащиеся должны понимать, что при более высоких скоростях мяч летит дальше, чем при более низких скоростях. Явно свяжите это с импульсом робота. Подчеркните, что вес робота не изменился, только его скорость, но оба они способствуют увеличению импульса робота. Спросите их, думают ли они, что мяч пролетел бы так же далеко, если бы робот был тяжелее. Вероятно, так и было бы. Подробнее о влиянии массы мяча во время столкновения читайте в следующем чтении.
-
Группы учащихся могли бы выбрать широко варьируемые скорости, но общая цель обучения состоит в том, чтобы учащиеся осознали, что более высокие скорости приводят к большему импульсу, который передает больше энергии мячу во время столкновений.