
![]() Casella degli strumenti per l'insegnante
Casella degli strumenti per l'insegnante
-
Schema dell'attività
Questa esplorazione introdurrà innanzitutto gli studenti all'impostazione della velocità di guida e poi chiederà loro di esplorare come la velocità del robot influisce sul suo slancio. Clicca qui (Google / .docx / .pdf) per la descrizione di questa attività. Comprendere lo slancio del robot sarà un concetto importante da applicare al gioco di bowling Strike Challenge. -
Cosa programmeranno gli studenti
L'utilizzo del progetto modello Speedbot (Drivetrain 2-motor, No Gyro) consente agli studenti di modificare le impostazioni di velocità dello Speedbot semplicemente aggiungendo set_drive_velocity a drive_for istruzioni. La parte guidata dell'attività prevede che gli studenti muovano lo Speedbot a diverse velocità e la fine dell'attività chiede loro di applicare le loro competenze di programmazione della velocità a test di trasferimento di quantità di moto e di energia.
Speedbot è pronto a guidare a diverse velocità!
Questa indagine ti aiuterà a saperne di più sulla programmazione dello Speedbot per guidare alle velocità più adatte all'attività. Alla fine, nella Strike Challenge, dovrai trovare una velocità per lo Speedbot che gli permetta di essere veloce e avere un grande slancio ma mantenere il controllo per colpire la palla con una buona angolazione e con grande forza.
![]() Casella degli strumenti per l'insegnante
Casella degli strumenti per l'insegnante
Ecco una panoramica dell'interfaccia utente di VEXcode V5. Gli studenti verranno introdotti a queste schede/pulsanti durante le attività in questo Momentum Alley STEM Lab. Sono inoltre forniti collegamenti in tutto il Laboratorio STEM per fornire ulteriori informazioni su queste schede/pulsanti. 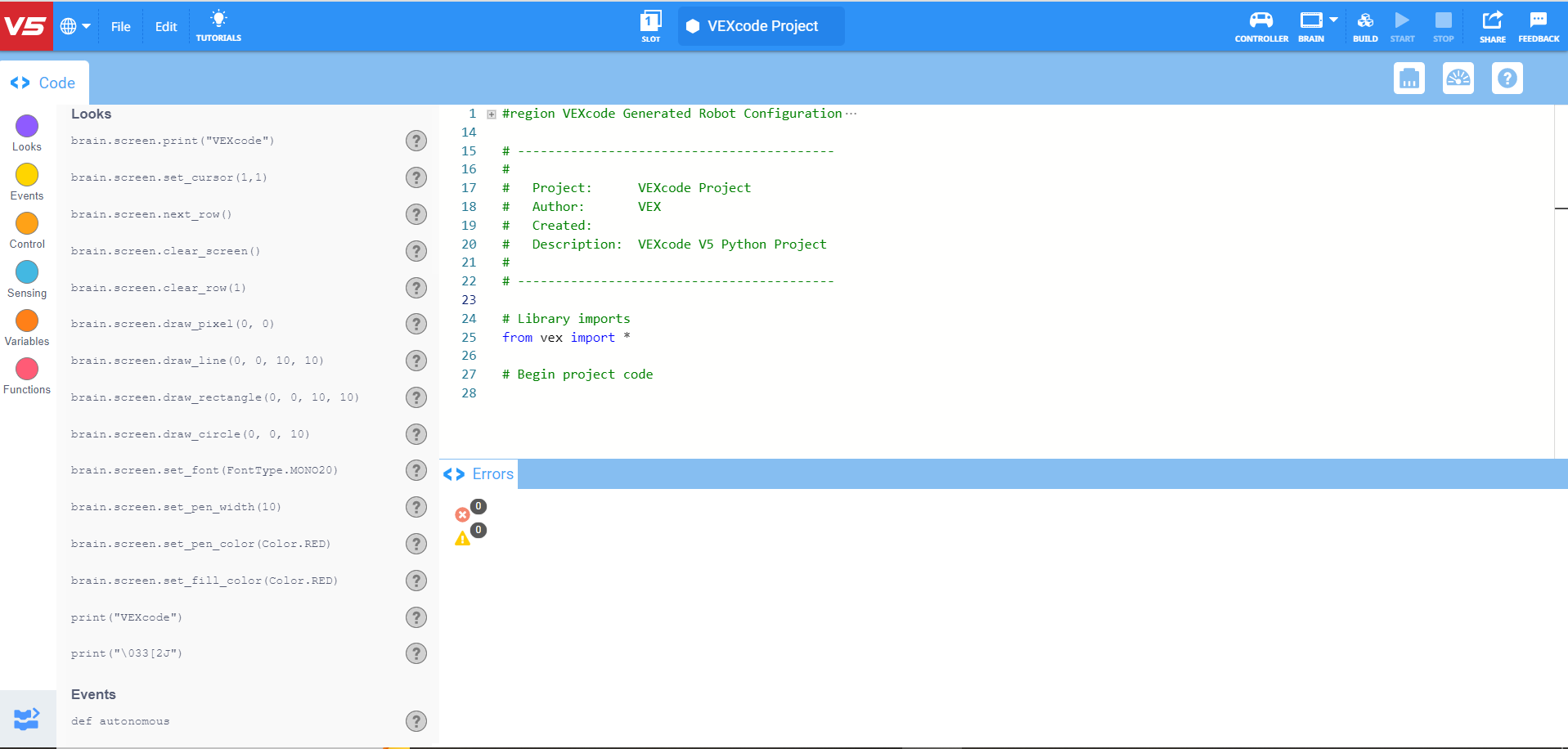
Istruzioni VEXcode V5 Python che verranno utilizzate nella prima parte di questa indagine:
-
drivetrain.set_drive_velocity(50, PERCENT)
-
drivetrain.drive_for(AVANTI, 200, MM)
-
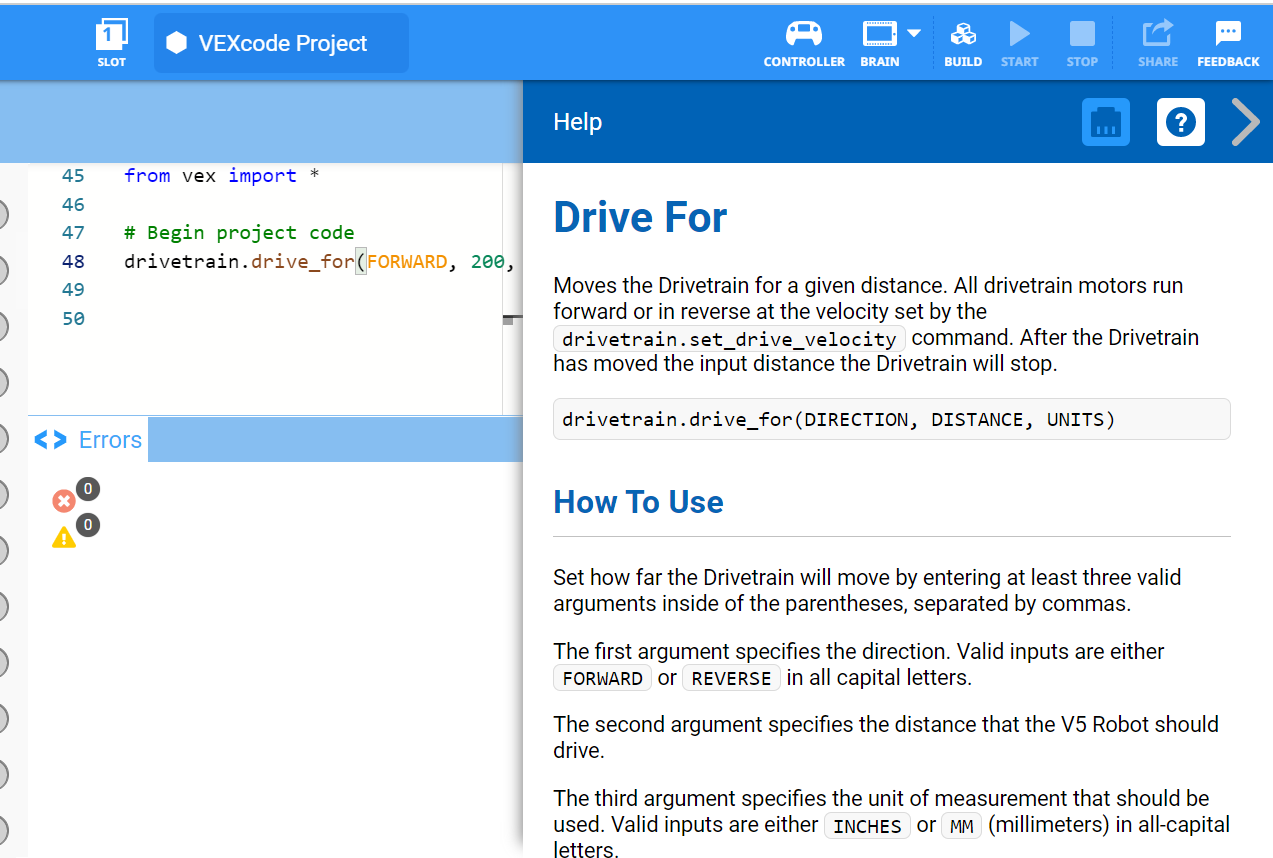
Per trovare ulteriori informazioni su un'istruzione, seleziona Guida, quindi seleziona l'icona del punto interrogativo accanto a un'istruzione per visualizzare ulteriori informazioni.
Assicurati di avere l'hardware richiesto, il tuo notebook di ingegneria e VEXcode V5 scaricato e pronto.
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Se è la prima volta che lo studente utilizza VEXcode V5, può fare riferimento ai tutorial in qualsiasi momento durante questa esplorazione. I tutorial si trovano nella barra degli strumenti. 
Ciascun gruppo di studenti dovrà procurarsi l'hardware necessario e il quaderno di ingegneria del gruppo. Quindi apri VEXcode V5.
| Quantità | Materiale necessario |
|---|---|
| 1 |
Robot robot veloce |
| 1 |
Batteria del robot carica |
| 1 |
Codice VEX V5 |
| 1 |
Cavo USB (se si utilizza un computer) |
| 1 |
Quaderno di ingegneria |
| 1 |
Palla (la dimensione e la forma di un pallone da calcio) |
| 1 |
Spazio libero di 3 x 3 m |
| 1 |
Metro o righello |
| 1 |
Rotolo di nastro |
| 1 |
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Modella ciascuna delle fasi di risoluzione dei problemi per gli studenti.
Passaggio 2: avviare un nuovo progetto
Completa i seguenti passaggi per iniziare il progetto:
-
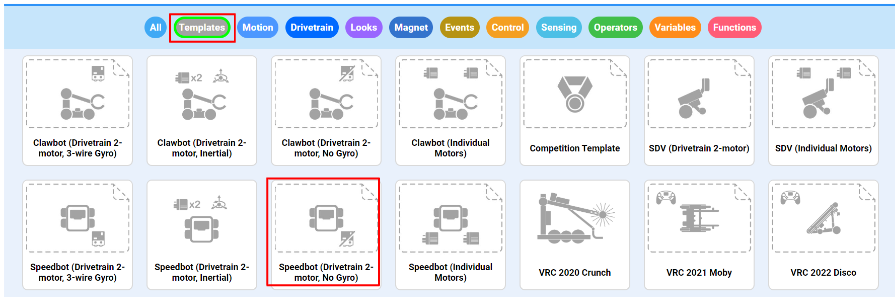
Apri il menu File e seleziona Apri esempi.

-
Seleziona e apri il progetto modello Speedbot (Drivetrain 2-motor, No Gyro). Il progetto modello contiene la configurazione del motore dello Speedbot. Se il modello non viene utilizzato, il tuo robot non eseguirà correttamente il progetto.
-
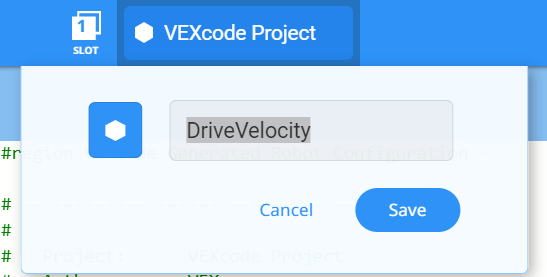
Dato che lavorerai sull'esplorazione della velocità, chiamerai il tuo progetto DriveVelocity. Al termine, selezionare Salva.
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
-
I nomi dei progetti possono contenere spazi tra o dopo le parole.

-
Puoi chiedere agli studenti di aggiungere le loro iniziali o il nome del loro gruppo al nome del progetto. Ciò aiuterà a differenziare i progetti se chiedi agli studenti di presentarli.
-
Poiché questa è la prima attività di programmazione che i tuoi studenti potrebbero tentare, dovresti modellare i passaggi e poi chiedere agli studenti di completare le stesse azioni. L'insegnante dovrebbe quindi monitorare gli studenti per assicurarsi che stiano seguendo i passaggi correttamente.
-
Assicurati che gli studenti abbiano selezionato Apri esempi dal menu File.
-
Assicurati che gli studenti abbiano selezionato il progetto modello Speedbot (Drivetrain 2-motor, No Gyro).
-
Puoi far notare agli studenti che ci sono diverse selezioni tra cui scegliere nella pagina Esempi. Man mano che costruiscono e utilizzano altri robot, avranno la possibilità di utilizzare modelli diversi.
- Controlla che il nome del progetto DriveVelocity sia ora nella finestra al centro della barra degli strumenti.

![]() Strumenti dell'insegnante
-
Salvataggio di progetti
Strumenti dell'insegnante
-
Salvataggio di progetti
-
Sottolinea che quando hanno aperto VEXcode V5 per la prima volta, la finestra era etichettata VEXcode Project. VEXcode Project è il nome del progetto predefinito quando VEXcode V5 viene aperto per la prima volta. Una volta rinominato Drive e salvato il progetto, la visualizzazione è stata aggiornata per mostrare il nuovo nome del progetto. Utilizzando questa finestra nella barra degli strumenti, è facile verificare che gli studenti stiano utilizzando il progetto corretto.
-
Spiega agli studenti che ora sono pronti per iniziare il loro primo progetto. Spiega agli studenti che seguendo pochi semplici passaggi saranno in grado di creare ed eseguire un progetto che farà avanzare lo Speedbot.
-
Ricorda agli studenti di salvare i loro progetti mentre lavorano. La sezione Python della Libreria VEX spiega le pratiche di salvataggio in VEXcode V5.
![]() Strumenti dell'insegnante
-
Fermati e discuti
Strumenti dell'insegnante
-
Fermati e discuti
Questo è un buon punto per fare una pausa e chiedere agli studenti di rivedere i passaggi appena completati all'avvio di un nuovo progetto in VEXcode V5 individualmente o in gruppi. Chiedi agli studenti di riflettere individualmente prima di condividere con il loro gruppo o con l'intera classe.
Passaggio 3: avanzare per 150 mm a velocità diverse
Non sei pronto per iniziare a programmare il robot per avanzare a velocità diverse!
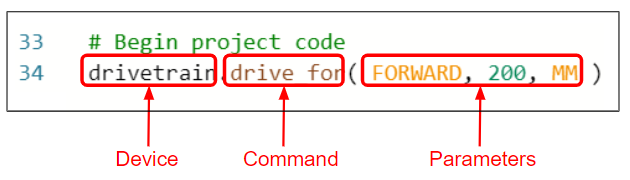
- Prima di iniziare a programmare, dobbiamo capire cos'è un'istruzione. Ci sono tre parti in un'istruzione.
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Potresti notare una funzione di completamento automatico quando inizi a digitare l'istruzione. Utilizza i tasti "Su" e "Giù" per selezionare il nome desiderato, quindi premi "Tab" o (Invio/Invio) sulla tastiera per effettuare la selezione. Per ulteriori informazioni su questa funzionalità consulta l'articolo Python . 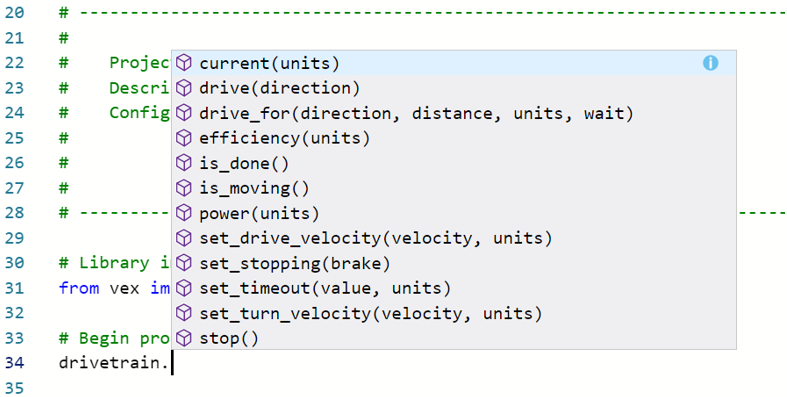
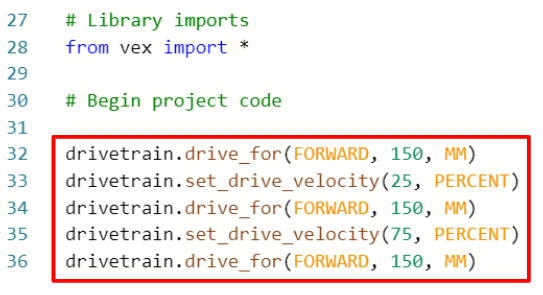
- Aggiungi le istruzioni al progetto:
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Nota che la seconda e la terza istruzione (righe 33 e 34 nell'immagine sopra) sono identiche alla quarta e quinta istruzione (righe 35 e 36 sopra), ma con un parametro di velocità diverso. Dopo aver aggiunto la terza istruzione, gli studenti possono evidenziare le righe da ripetere e copiarle e incollarle per completare il progetto. Possono quindi modificare la velocità nella quarta riga al 75%.
-
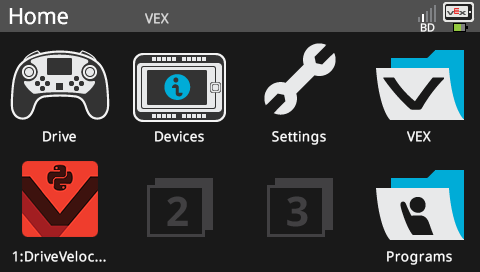
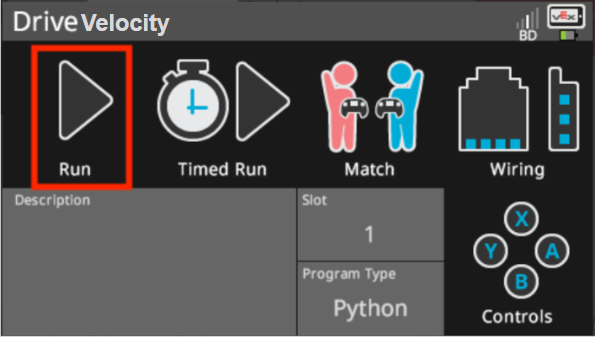
Seleziona l'icona Slot per scegliere uno degli otto slot disponibili sul Robot Brain e seleziona lo slot 1.

-
Collega il cervello robot V5 al computer utilizzando un cavo micro USB e accendi il cervello robot V5. L'icona Cervello nella barra degli strumenti diventa verde una volta stabilita una connessione riuscita.

-
Selezionare Download per scaricare il progetto su Brain.

![]() Casella degli strumenti per l'insegnante
Casella degli strumenti per l'insegnante
- Ricordare agli studenti di scollegare il cavo USB dal cervello del robot. Se il robot è collegato a un computer durante l'esecuzione di un progetto, il robot potrebbe tirare il cavo di connessione.
-
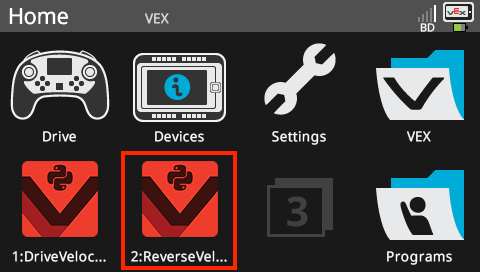
Assicurati che il tuo progetto sia stato scaricato (Python) guardando lo schermo del cervello del robot. Il nome del progetto DriveVelocity dovrebbe essere elencato nello Slot 1.
![]() Casella degli strumenti per l'insegnante
Casella degli strumenti per l'insegnante
-
Fermati e discuti
Chiedi agli studenti di prevedere cosa pensano che accadrà quando il progetto verrà scaricato ed eseguito sul robot Speedbot. Chiedi agli studenti di registrare le loro previsioni sui loro quaderni di ingegneria. Se il tempo lo consente, chiedi a ciascun gruppo di condividere la propria previsione.Gli studenti dovrebbero prevedere che lo Speedbot si muoverà prima in avanti alla sua velocità predefinita (50%), poi più lentamente (25%) rispetto alla velocità predefinita e quindi più velocemente (75%) rispetto alla velocità predefinita.
-
Modello Primo
Modello che esegue il progetto davanti alla classe prima di farlo provare a tutti gli studenti contemporaneamente. Riunisci gli studenti in un'area e lascia spazio sufficiente affinché lo Speedbot possa muoversi se è posizionato sul pavimento.Spiega agli studenti che ora è il loro turno di portare avanti il loro progetto. Assicurati che abbiano un percorso libero e che nessuno Speedbot si incontri.
-
Esegui (Python) il progetto sul robot assicurandoti che il progetto sia selezionato, quindi premi il pulsante Esegui sul cervello del robot. Congratulazioni per aver creato il tuo primo progetto!
Fase 4: Guidare in avanti e indietro per 150 mm a velocità diverse
Ora che hai programmato il tuo robot per avanzare a velocità diverse, programmalo ora per avanzare e in retromarcia a velocità diverse.
-
Modificare il parametro nella seconda istruzione drive_for per visualizzare REVERSE.

-
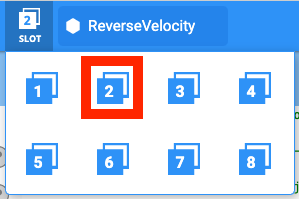
Seleziona il nome del progetto per cambiarlo da DriveVelocity a ReverseVelocity.

-
Seleziona l'icona Slot per scegliere un nuovo slot. Seleziona lo spazio 2.
-
Scarica (Python) il progetto.

-
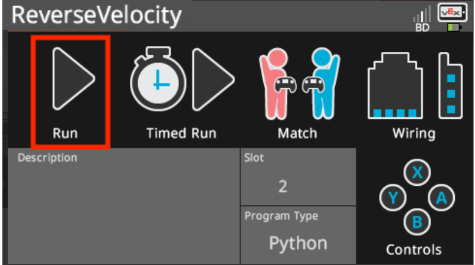
Assicurati che il tuo progetto sia stato scaricato (Python) guardando lo schermo del cervello del robot. Il nome del progetto ReverseVelocity dovrebbe essere elencato nello Slot 2.
-
Esegui (Python) il progetto sul robot assicurandoti che il progetto sia selezionato, quindi premi il pulsante Esegui sul cervello del robot.
![]() Casella degli strumenti per l'insegnante
-
Completamento del passaggio 4
Casella degli strumenti per l'insegnante
-
Completamento del passaggio 4
-
Per modificare il comando drive_for da forward a reverse, è sufficiente modificare il primo parametro in REVERSE. In questo modo i motori della trasmissione si muoveranno nella direzione opposta.
-
Il numero di mm può essere modificato, ma per questo esempio li lasceremo a 150 mm come impostato nel passaggio precedente.
-
Ricordare agli studenti di scollegare il cavo USB dal cervello del robot prima di eseguire il progetto.
-
Ricorda agli studenti di salvare i loro progetti mentre lavorano. La libreria VEX ha una sezione per Python che spiega le pratiche di salvataggio in VEXcode V5.
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Chiedi alle squadre di condividere l'area di test e la palla, se necessario, ma potrebbero anche essere allestite più aree di test, ciascuna con la propria palla. Decidi se vuoi impostare le aree di prova o se vuoi che lo facciano gli studenti.
Passaggio 5: impostazione dell'area di test
-
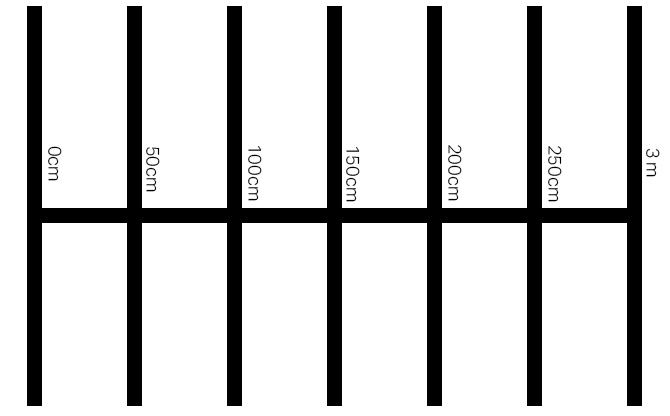
Usa del nastro adesivo e un metro per creare una linea di 3 metri sul pavimento come la linea orizzontale mostrata nell'immagine sopra.
-
Dopo aver creato la linea, utilizza ancora una volta il nastro adesivo e il misuratore per creare linee di 1 metro attraverso la linea di 3 metri come le linee verticali nell'immagine sopra. Nastro una linea di 1 m ad ogni segno di 50 cm sulla linea verticale iniziando da 0 cm.
-
Le linee orizzontali più corte dovrebbero essere centrate sulla linea verticale più lunga.
-
-
Mentre l'area viene allestita, uno o due membri del tuo team dovrebbero creare un nuovo progetto chiamato Momentum. Imposta la velocità al 50% e fai avanzare lo Speedbot fino alla prima linea a 50 cm. Tieni presente che 1 cm = 10 mm, quindi il robot avanzerà di 50 cm o 500 millimetri.
![]() Strumenti per l'insegnante
-
Perché questa attività?
Strumenti per l'insegnante
-
Perché questa attività?
-
La raccolta e l’analisi dei dati, anche il semplice riconoscimento di modelli, sono competenze scientifiche fondamentali. Questa attività aggiunge struttura all'analisi dei dati prevenendo passi falsi comuni.
-
Si noti che le istruzioni non dicono agli studenti di variare la distanza di guida del robot insieme alla variazione della velocità del robot. Questa è un'applicazione intenzionale di ciò che gli scienziati dell'apprendimento chiamano la strategia di controllo delle variabili. Insegnare agli investigatori alle prime armi a manipolare una variabile alla volta (ad esempio, la velocità in questo caso) per determinare la sua influenza su una seconda variabile (ad esempio, la distanza percorsa dalla palla dopo la collisione) è importante perché non è necessariamente un approccio che gli studenti adotteranno. spontaneamente rispetto ad un approccio "ipotesi e verifica". I tipici approcci di "ipotesi e verifica" spesso manipolano più di una variabile alla volta (ad esempio, modificando sia la velocità che la distanza percorsa dal robot) e osservando l'impatto della confluenza sulla distanza percorsa dalla palla dopo la rotazione. Questa attività cerca di allontanare gli studenti da ciò perché le relazioni tra le variabili diventano ambigue. È la maggiore velocità del robot, la maggiore distanza percorsa dal robot o entrambi che portano la palla a viaggiare più lontano? Non possiamo rispondere quando manipoliamo entrambe le variabili contemporaneamente.
-
Tuttavia, i team potrebbero provare spontaneamente a guidare il robot per distanze diverse. Se osservi ciò, chiedi loro solo di modificare la distanza ma di mantenere la stessa velocità di una prova con la distanza originale di 500 mm. In questo modo, possono confrontare la stessa velocità con diverse distanze di guida per vedere se la distanza di guida del robot influisce anche sulla distanza percorsa dalla palla.
Passaggio 6: testare il trasferimento di energia durante le collisioni

Area test sfida bowling con robot e palla
Centrare la palla sulla linea orizzontale a 50 cm e posizionare il robot in modo che la parte anteriore sia centrata sulla linea orizzontale a 0 cm. Assicurati che la parte anteriore del robot sia rivolta nella direzione della palla. Esegui il tuo primo progetto Momentum con la velocità impostata al 50% e presta molta attenzione quando il robot entra in collisione con la palla.
Registra la velocità impostata, la distanza percorsa e la distanza percorsa dalla palla in questa tabella dati (Google / .pdf). La prima riga della tabella è stata avviata per te in base al progetto Momentum su cui hai lavorato nel passaggio precedente. Continua ad aggiungere dati a questa tabella mentre provi a impostare velocità diverse. Puoi quindi aggiungere i dati di altri team mentre discuti i tuoi risultati in classe.
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
-
Prepara l'area affinché la palla rimbalzi in diverse direzioni per diverse distanze. Chiudere porte e/o finestre secondo necessità.
-
La tabella per Exploring Velocity può essere salvata dal basso oppure gli studenti possono ricrearla nei loro quaderni di ingegneria.
-
Una rubrica per la valutazione dei taccuini di ingegneria del team è disponibile qui (Google ), mentre una rubrica per la valutazione dei taccuini individuali può essere trovata qui (Google ). Ogni volta che prevedi di valutare il lavoro degli studenti con una o più rubriche, assicurati di condividere la griglia con loro prima che inizino a lavorare sul progetto.

Pensa e rispondi alle domande seguenti nel tuo taccuino di ingegneria mentre raccogli i dati:
-
Come puoi dire che lo slancio del robot ha trasferito energia alla palla durante la collisione? Spiega con dettagli.
-
Ripetere il test almeno altre due volte. Provare una velocità inferiore al 50%. Rimetti la pallina nella sua posizione e registra sulla tabella la distanza percorsa dalla pallina. Inoltre, provare una velocità superiore al 50%. Rimetti la pallina nella sua posizione e registra sulla tabella la distanza percorsa dalla pallina.
-
Quando tutti i gruppi hanno completato i tre test, discuti le velocità scelte dagli altri gruppi e la distanza percorsa dalla palla nei loro test. Man mano che i team condividono i propri dati, aggiungi i risultati alla tua tabella.
-
Cerca modelli nei dati. La distanza percorsa dalla palla aumenta o diminuisce all'aumentare della velocità impostata?
![]() Casella degli strumenti per l'insegnante
-
risposte
Casella degli strumenti per l'insegnante
-
risposte
-
Il movimento della palla è la prova che il robot ha trasferito energia durante la collisione. Gli studenti potrebbero anche descrivere la velocità della palla dopo l'impatto o la direzione del suo viaggio come prova.
-
La distanza percorsa dalla palla dipende dalla massa/peso della palla utilizzata e dalla velocità impostata per il robot.
-
Gli studenti dovrebbero riconoscere che velocità più elevate portano la palla a viaggiare più lontano rispetto a velocità più basse. Collega esplicitamente questo allo slancio del robot. Evidenziare che il peso del robot non è cambiato, solo la sua velocità, ma che entrambi contribuiscono allo slancio del robot. Chiedi loro se pensano che la palla viaggerebbe così lontano se il robot fosse più pesante. Presumibilmente lo farebbe. Scopriremo di più sugli effetti della massa della palla durante la collisione nella prossima lettura.
-
I gruppi di studenti potrebbero aver selezionato velocità ampiamente variabili, ma l'obiettivo di apprendimento complessivo è che gli studenti riconoscano che velocità più elevate portano a una maggiore quantità di moto che trasferisce più energia alla palla durante le collisioni.