
वेग की खोज - पायथन
![]() शिक्षक टूलबॉक्स
शिक्षक टूलबॉक्स
-
गतिविधि रूपरेखा
यह अन्वेषण सबसे पहले छात्रों को ड्राइविंग के लिए वेग निर्धारित करने से परिचित कराएगा और फिर उनसे यह पता लगाने के लिए कहेगा कि रोबोट का वेग उसकी गति को कैसे प्रभावित करता है। इस गतिविधि की रूपरेखा के लिए यहां क्लिक करें (Google / .docx / .pdf)। रोबोट की गति को समझना स्ट्राइक चैलेंज बॉलिंग गेम में लागू करने के लिए एक महत्वपूर्ण अवधारणा होगी। -
छात्र क्या प्रोग्राम करेंगे
स्पीडबोट (ड्राइवट्रेन 2-मोटर, नो गायरो) टेम्पलेट प्रोजेक्ट का उपयोग से छात्रोंनिर्देशset_drive_velocityजोड़कर स्पीडबोट की वेग सेटिंग्स को बदलने की अनुमति मिलती है गतिविधि के निर्देशित भाग में छात्रों को स्पीडबोट को विभिन्न वेगों पर चलाना होता है और गतिविधि के अंत में उन्हें संवेग और ऊर्जा हस्तांतरण के परीक्षणों में वेग प्रोग्रामिंग के लिए अपने कौशल को लागू करने के लिए कहा जाता है।
स्पीडबोट विभिन्न वेगों पर ड्राइव करने के लिए तैयार है!
यह जांच आपको स्पीडबोट को उस गति पर चलाने के लिए प्रोग्रामिंग करने के बारे में अधिक जानने में मदद करेगी जो कार्य के लिए सबसे उपयुक्त है। अंत में स्ट्राइक चैलेंज में, आपको स्पीडबोट के लिए एक वेग ढूंढना होगा जो उसे तेज होने और महान गति प्रदान करने की अनुमति दे, लेकिन गेंद को अच्छे कोण पर और महान बल के साथ मारने के लिए नियंत्रण में रहे।
![]() शिक्षक टूलबॉक्स
शिक्षक टूलबॉक्स
यहां VEXcode V5 के उपयोगकर्ता इंटरफ़ेस का अवलोकन दिया गया है। इस मोमेंटम एली STEM लैब में गतिविधियों के दौरान छात्रों को इन टैब/बटन से परिचित कराया जाएगा। इन टैब्स/बटनों के बारे में अधिक जानकारी प्रदान करने के लिए STEM लैब में लिंक भी उपलब्ध कराए गए हैं। 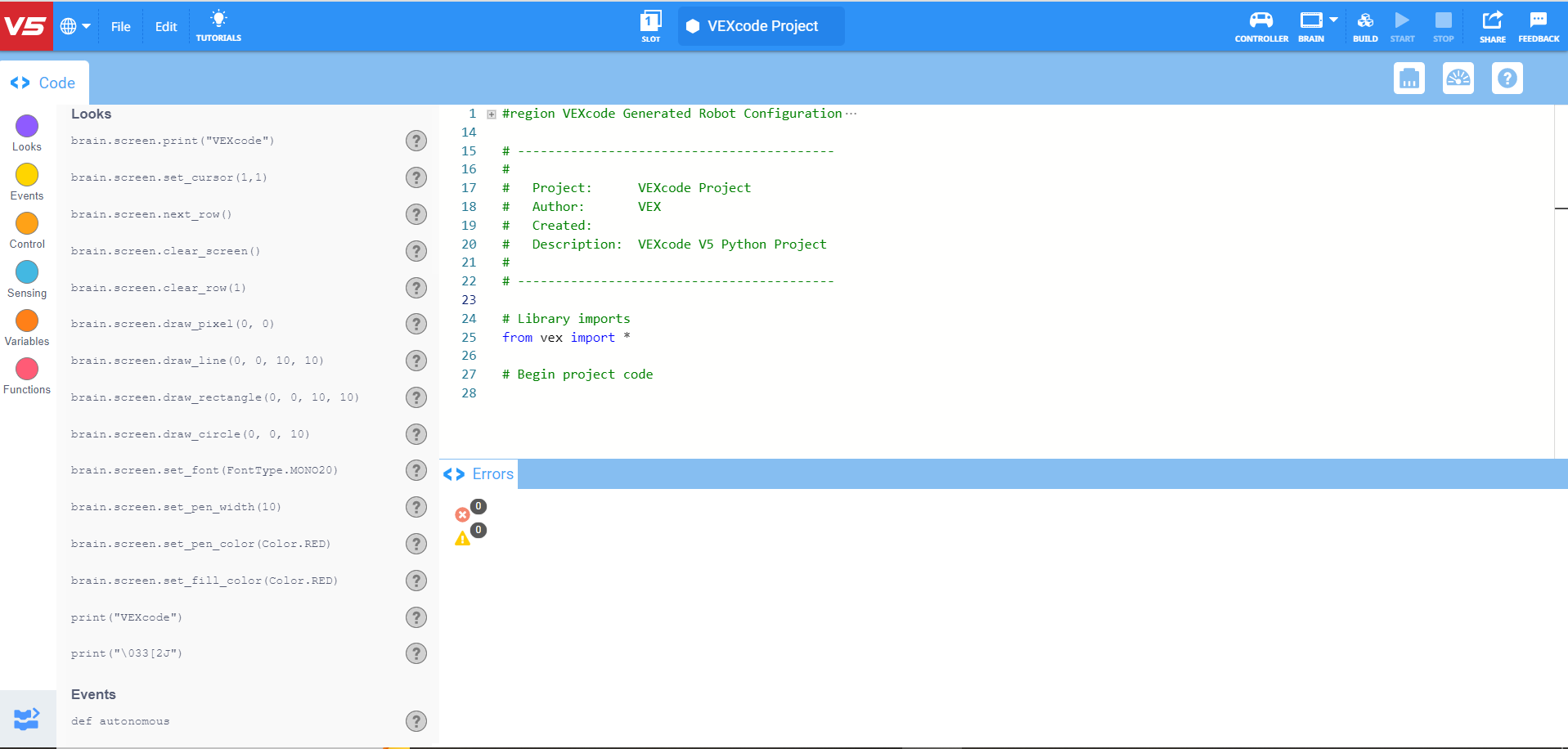
VEXcode V5 पायथन निर्देश जो इस जांच के पहले भाग में उपयोग किए जाएंगे:
- ड्राइवट्रेन.सेट_ड्राइव_वेलोसिटी(50, प्रतिशत)
- drivetrain.drive_for(फॉरवर्ड, 200, MM)
-
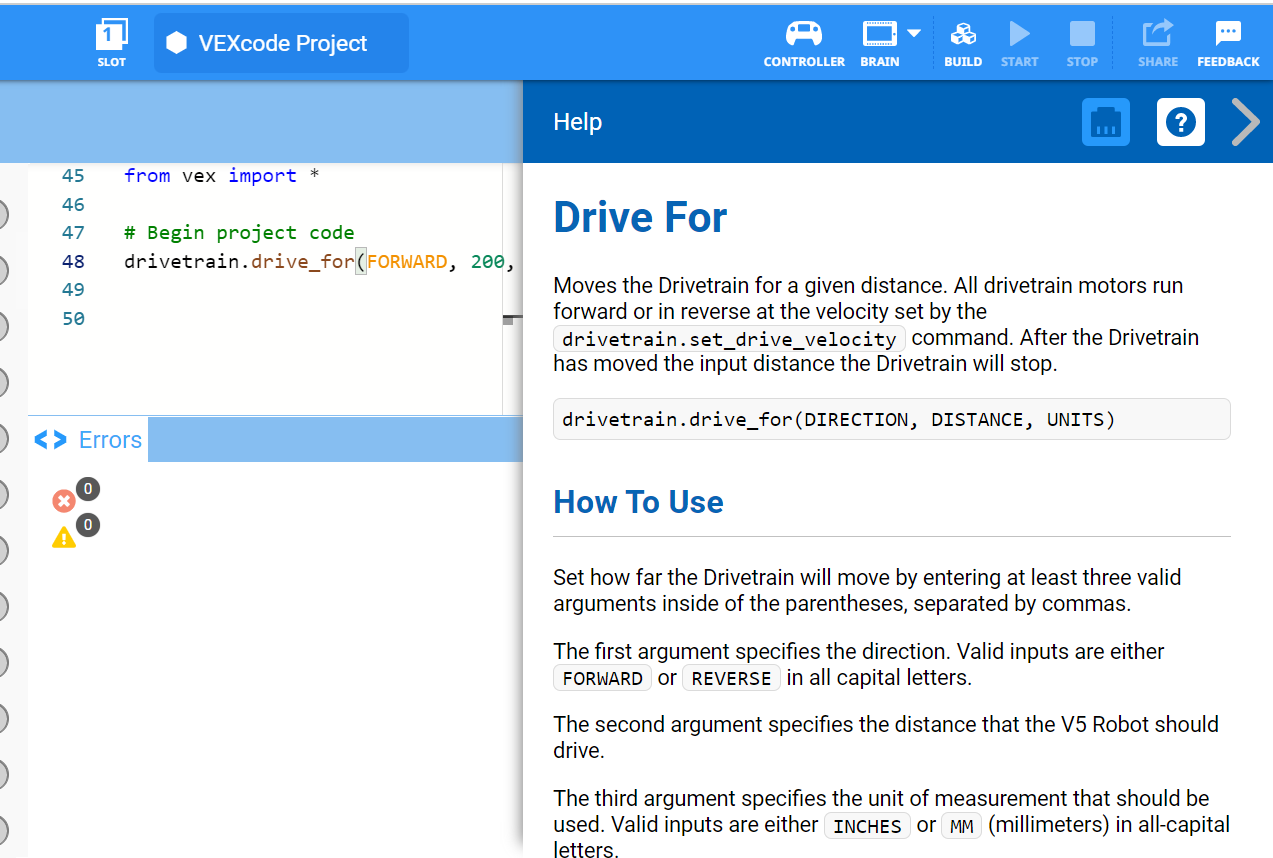
किसी निर्देश के बारे में अधिक जानकारी प्राप्त करने के लिए, सहायता का चयन करें और फिर अधिक जानकारी देखने के लिए निर्देश के आगे प्रश्न चिह्न आइकन का चयन करें।
सुनिश्चित करें कि आपके पास आवश्यक हार्डवेयर, आपकी इंजीनियरिंग नोटबुक और VEXcode V5 डाउनलोड और तैयार है।
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
यदि छात्र पहली बार VEXcode V5 का उपयोग कर रहे हैं, तो वे इस अन्वेषण के दौरान किसी भी समय ट्यूटोरियल का संदर्भ ले सकते हैं। ट्यूटोरियल्स टूलबार में स्थित हैं। 
छात्रों के प्रत्येक समूह को आवश्यक हार्डवेयर और समूह की इंजीनियरिंग नोटबुक मिलनी चाहिए। फिर VEXcode V5 खोलें.
| मात्रा | आवश्यक सामग्री |
|---|---|
| 1 |
स्पीडबॉट रोबोट |
| 1 |
चार्ज रोबोट बैटरी |
| 1 |
वेक्सकोड V5 |
| 1 |
यूएसबी केबल (यदि कंप्यूटर का उपयोग कर रहे हैं) |
| 1 |
इंजीनियरिंग नोटबुक |
| 1 |
गेंद (फुटबॉल की गेंद के आकार और आकृति की) |
| 1 |
3 मीटर x 3 मीटर खाली जगह |
| 1 |
मीटर स्टिक या रूलर |
| 1 |
टेप का रोल |
| 1 |
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
छात्रों के लिए समस्या निवारण के प्रत्येक चरण का मॉडल प्रस्तुत करें।
चरण 2: एक नई परियोजना शुरू करें
परियोजना शुरू करने के लिए निम्नलिखित चरण पूरे करें:
-
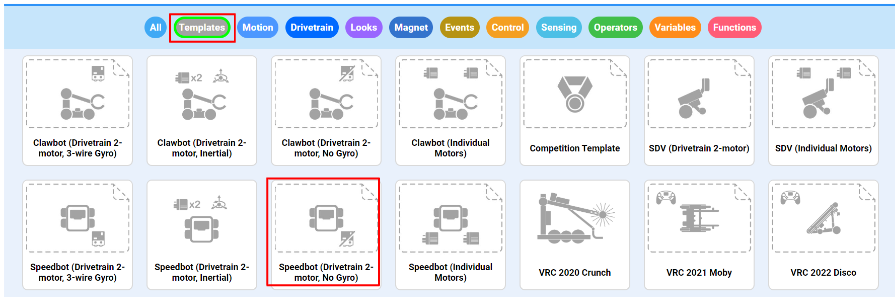
फ़ाइल मेनू खोलें और उदाहरण खोलें का चयन करें.

-
स्पीडबोट (ड्राइवट्रेन 2-मोटर, नो गायरो) टेम्पलेट प्रोजेक्ट का चयन करें और उसे खोलें। टेम्पलेट प्रोजेक्ट में स्पीडबॉट कामोटर कॉन्फ़िगरेशनशामिल है। यदि टेम्पलेट का उपयोग नहीं किया जाता है, तो आपका रोबोट प्रोजेक्ट को सही ढंग से नहीं चलाएगा।
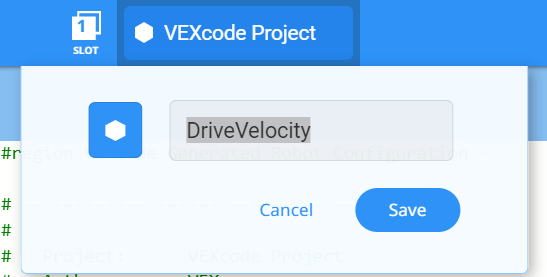
-
चूंकि आप वेग की खोज पर काम करेंगे, इसलिए आप अपने प्रोजेक्ट का नामDriveVelocityरखेंगे। समाप्त होने पर,सहेजें चुनें.
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
-
परियोजना नामों में शब्दों के बीच या बाद में रिक्त स्थान हो सकते हैं।

- आप विद्यार्थियों से परियोजना के नाम में अपना आद्याक्षर या अपने समूह का नाम जोड़ने के लिए कह सकते हैं। यदि आप विद्यार्थियों से परियोजनाएं प्रस्तुत करने के लिए कहेंगे तो इससे परियोजनाओं में अंतर करने में मदद मिलेगी।
- चूंकि यह प्रोग्रामिंग से संबंधित पहली गतिविधि है जिसे आपके छात्र कर सकते हैं, इसलिए आपको चरणों का मॉडल बनाना चाहिए, और फिर छात्रों से वही क्रियाएं पूरी करने को कहना चाहिए। इसके बाद शिक्षक को छात्रों पर निगरानी रखनी चाहिए ताकि यह सुनिश्चित हो सके कि वे चरणों का सही ढंग से पालन कर रहे हैं।
- सुनिश्चित करें कि छात्रों ने फ़ाइल मेनू से ओपन उदाहरण का चयन किया है।
- सुनिश्चित करें कि छात्रों ने स्पीडबोट (ड्राइवट्रेन 2-मोटर, नो गायरो) टेम्पलेट प्रोजेक्ट का चयन किया है।
- आप विद्यार्थियों को बता सकते हैं कि उदाहरण पृष्ठ पर चुनने के लिए कई विकल्प हैं। जैसे-जैसे वे अन्य रोबोट बनाएंगे और उनका उपयोग करेंगे, उन्हें विभिन्न टेम्पलेट्स का उपयोग करने का अवसर मिलेगा।
- यह सुनिश्चित करने के लिए जांचें कि प्रोजेक्ट का नाम DriveVelocityअब टूलबार के मध्य विंडो में है।

![]() शिक्षक टूलबॉक्स
-
प्रोजेक्ट सहेजना
शिक्षक टूलबॉक्स
-
प्रोजेक्ट सहेजना
-
बता दें कि जब उन्होंने पहली बार VEXcode V5 खोला था, तो विंडो पर VEXcode प्रोजेक्ट लिखा हुआ था। जब VEXcode V5 को पहली बार खोला जाता है, तो VEXcode प्रोजेक्ट डिफ़ॉल्ट प्रोजेक्ट नाम होता है। जब प्रोजेक्ट का नाम बदलकर ड्राइव कर दिया गया और उसे सहेज दिया गया, तो नया प्रोजेक्ट नाम दिखाने के लिए डिस्प्ले को अपडेट कर दिया गया। टूलबार में इस विंडो का उपयोग करके यह जांचना आसान है कि छात्र सही प्रोजेक्ट का उपयोग कर रहे हैं या नहीं।
-
विद्यार्थियों को बताएं कि वे अब अपना पहला प्रोजेक्ट शुरू करने के लिए तैयार हैं। छात्रों को समझाएं कि कुछ सरल चरणों का पालन करके, वे एक प्रोजेक्ट बना और चला सकेंगे जो स्पीडबोट को आगे बढ़ाएगा।
-
विद्यार्थियों को याद दिलाएं कि वे काम करते समय अपने प्रोजेक्ट को सेव कर लें। VEX लाइब्रेरी का पायथनअनुभाग VEXcode V5 में बचत प्रथाओं की व्याख्या करता है।
![]() शिक्षक टूलबॉक्स
-
रुकें और चर्चा करें
शिक्षक टूलबॉक्स
-
रुकें और चर्चा करें
यह एक अच्छा बिन्दु है कि हम रुकें और विद्यार्थियों से VEXcode V5 में नया प्रोजेक्ट शुरू करने के लिए व्यक्तिगत रूप से या समूहों में अभी-अभी पूरे किए गए चरणों की समीक्षा करवाएं। विद्यार्थियों से कहें कि वे अपने समूह या पूरी कक्षा के साथ साझा करने से पहले व्यक्तिगत रूप से विचार करें।
चरण 3: विभिन्न वेगों पर 150 मिमी तक आगे बढ़ें
आप रोबोट को अलग-अलग वेगों पर आगे बढ़ने के लिए प्रोग्रामिंग करने के लिए तैयार नहीं हैं!
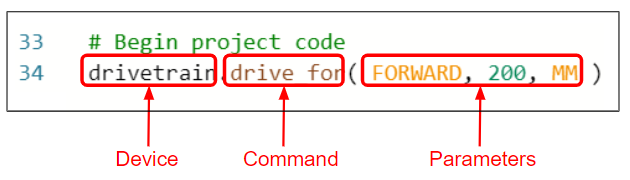
- प्रोग्रामिंग शुरू करने से पहले हमें यह समझना होगा कि निर्देश क्या है। एक अनुदेश के तीन भाग होते हैं।
-
प्रोजेक्ट में निर्देश जोड़ें, ताकि आपका प्रोजेक्ट इस तरह दिखे:
# लाइब्रेरी आयात from vex import * # प्रोजेक्ट कोड शुरू करें drivetrain.drive_for(FORWARD, 150, MM) drivetrain.set_drive_velocity(25, PERCENT) drivetrain.drive_for(FORWARD, 150, MM) drivetrain.set_drive_velocity(75, PERCENT) drivetrain.drive_for(FORWARD, 150, MM)
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
ध्यान दें कि दूसरा और तीसरा निर्देश (ऊपर चित्र में पंक्ति 33 और 34) चौथे और पांचवें निर्देश (ऊपर पंक्ति 35 और 36) के समान हैं, लेकिन उनमें वेग पैरामीटर भिन्न है। तीसरा निर्देश जोड़ने के बाद, छात्र दोहराई जाने वाली पंक्तियों को चिन्हित कर सकते हैं और उन्हें कॉपी करके पेस्ट करके परियोजना को पूरा कर सकते हैं। इसके बाद वे चौथी पंक्ति में वेग को 75 प्रतिशत तक बदल सकते हैं।
-
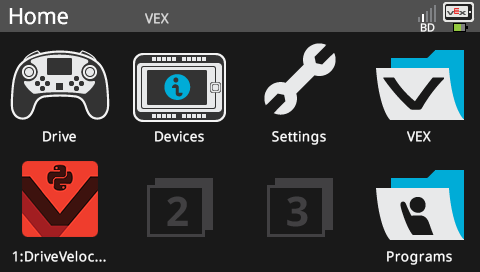
रोबोट ब्रेन पर उपलब्ध आठ स्लॉट में से एक चुनने के लिए स्लॉट आइकन का चयन करें और स्लॉट 1 का चयन करें।

-
माइक्रो यूएसबी केबल का उपयोग करके V5 रोबोट ब्रेन को कंप्यूटर से कनेक्ट करें और V5 रोबोट ब्रेन को पावर दें। एक बार सफल कनेक्शन हो जाने पर टूलबार में ब्रेन आइकनहराहो जाता है।

-
प्रोजेक्ट को ब्रेन में डाउनलोड करने के लिएडाउनलोडचयन करें।

![]() शिक्षक टूलबॉक्स
शिक्षक टूलबॉक्स
- छात्रों को रोबोट ब्रेन से यूएसबी केबल को डिस्कनेक्ट करने के लिए याद दिलाएं। किसी प्रोजेक्ट को चलाते समय रोबोट को कंप्यूटर से कनेक्ट करने पर, रोबोट कनेक्शन केबल को खींच सकता है।
-
रोबोट ब्रेन की स्क्रीन को देखकर सुनिश्चित करें कि आपका प्रोजेक्ट डाउनलोड हो गया है (पायथन)। प्रोजेक्ट का नाम DriveVelocity स्लॉट 1 में सूचीबद्ध होना चाहिए।
![]() शिक्षक टूलबॉक्स
शिक्षक टूलबॉक्स
-
रुकें और चर्चा करें
विद्यार्थियों से यह अनुमान लगाने को कहें कि उनके विचार से जब यह प्रोजेक्ट डाउनलोड किया जाएगा और स्पीडबोट रोबोट पर चलाया जाएगा तो क्या होगा। विद्यार्थियों से कहें कि वे अपनी भविष्यवाणियाँ अपनी इंजीनियरिंग नोटबुक में लिखें। यदि समय हो तो प्रत्येक समूह से अपना पूर्वानुमान साझा करने को कहें।छात्रों को यह अनुमान लगाना चाहिए कि स्पीडबोट पहले अपने डिफ़ॉल्ट वेग (50%) पर आगे बढ़ेगा, फिर डिफ़ॉल्ट वेग से धीमी गति से (25%), और फिर डिफ़ॉल्ट वेग से तेज़ गति से (75%) आगे बढ़ेगा।
-
मॉडल प्रथम
सभी छात्रों को एक साथ प्रयास करने से पहले कक्षा के सामने परियोजना को चलाने वाला मॉडल। छात्रों को एक जगह पर इकट्ठा करें और यदि स्पीडबोट को फर्श पर रखा जाए तो उसके चलने के लिए पर्याप्त जगह छोड़ दें।विद्यार्थियों से कहें कि अब उनकी परियोजना चलाने की बारी है। सुनिश्चित करें कि उनके पास स्पष्ट रास्ता हो और कोई स्पीडबॉट एक दूसरे से न टकराए।
-
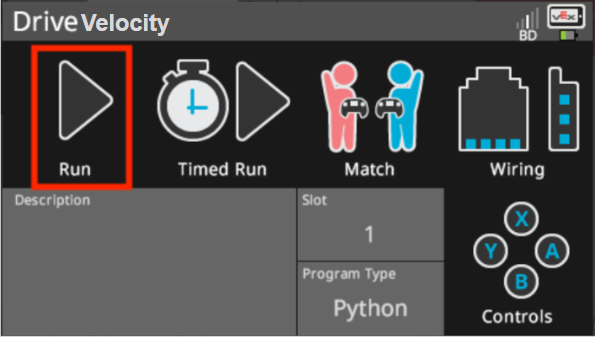
यह सुनिश्चित करके कि प्रोजेक्ट चयनित है, रोबोट पर प्रोजेक्ट चलाएं (पायथन) और फिर रोबोट ब्रेन पररनबटन दबाएं। अपनी पहली परियोजना बनाने के लिए बधाई!
चरण 4: अलग-अलग वेगों पर 150 मिमी तक आगे और पीछे ड्राइव करें
अब जब आपने अपने रोबोट को अलग-अलग वेगों पर आगे बढ़ने के लिए प्रोग्राम कर लिया है, तो अब इसे अलग-अलग वेगों पर आगे और पीछे चलने के लिए प्रोग्राम करें।
-
दूसरेdrive_forनिर्देश में पैरामीटर को REVERSE, में बदलें ताकि आपका प्रोजेक्ट इस तरह दिखे:
# लाइब्रेरी आयात from vex import * # प्रोजेक्ट कोड शुरू करें drivetrain.drive_for(FORWARD, 150, MM) drivetrain.set_drive_velocity(25, PERCENT) drivetrain.drive_for(REVERSE, 150, MM) drivetrain.set_drive_velocity(75, PERCENT) drivetrain.drive_for(FORWARD, 150, MM) -
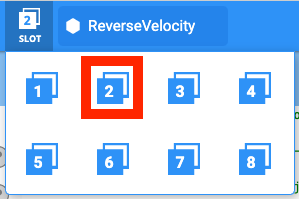
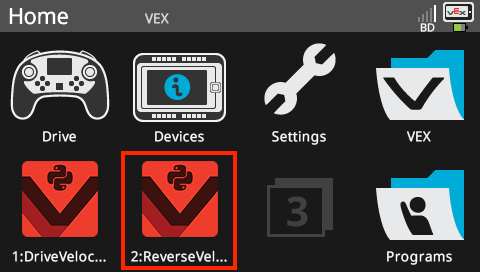
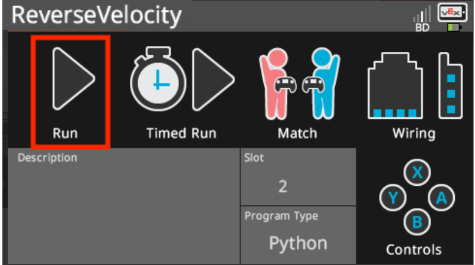
प्रोजेक्ट का नाम चुनें और उसे DriveVelocity से ReverseVelocity में बदलें।

-
नया स्लॉट चुनने के लिए स्लॉट आइकन का चयन करें। स्लॉट 2 का चयन करें.
-
(पायथन) परियोजना डाउनलोड करें.

-
रोबोट ब्रेन की स्क्रीन को देखकर सुनिश्चित करें कि आपका प्रोजेक्ट डाउनलोड हो गया है (पायथन)। प्रोजेक्ट का नाम रिवर्सवेलोसिटी स्लॉट 2 में सूचीबद्ध होना चाहिए।
-
यह सुनिश्चित करके कि प्रोजेक्ट चयनित है, रोबोट पर प्रोजेक्ट चलाएं (पायथन) और फिर रोबोट ब्रेन पररनबटन दबाएं।
![]() शिक्षक टूलबॉक्स
-
चरण 4 पूरा करना
शिक्षक टूलबॉक्स
-
चरण 4 पूरा करना
-
drive_forकमांड कोforwardसेreverseमें बदलने के लिए, बस पहले पैरामीटर को REVERSE में बदलें। इससे ड्राइवट्रेन में मोटरें विपरीत दिशा में चलेंगी।
-
मिमी की संख्या को बदला जा सकता है, लेकिन इस उदाहरण के लिए हम उन्हें पिछले चरण में निर्धारित 150 मिमी पर ही छोड़ देंगे।
-
छात्रों को याद दिलाएं कि परियोजना शुरू करने से पहले रोबोट ब्रेन से यूएसबी केबल को डिस्कनेक्ट कर दें।
-
विद्यार्थियों को याद दिलाएं कि वे काम करते समय अपने प्रोजेक्ट को सेव कर लें। VEX लाइब्रेरी मेंपायथनके लिए एक अनुभाग है जो VEXcode V5 में बचत प्रथाओं की व्याख्या करता है।
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
यदि आवश्यक हो तो टीमों से परीक्षण क्षेत्र और गेंद साझा करने के लिए कहें, लेकिन प्रत्येक टीम के पास अपनी गेंद के साथ कई परीक्षण क्षेत्र भी स्थापित किए जा सकते हैं। निर्णय लें कि क्या आप परीक्षण क्षेत्र स्थापित करना चाहते हैं, या आप चाहते हैं कि छात्र ऐसा करें।
चरण 5: अपना परीक्षण क्षेत्र स्थापित करना
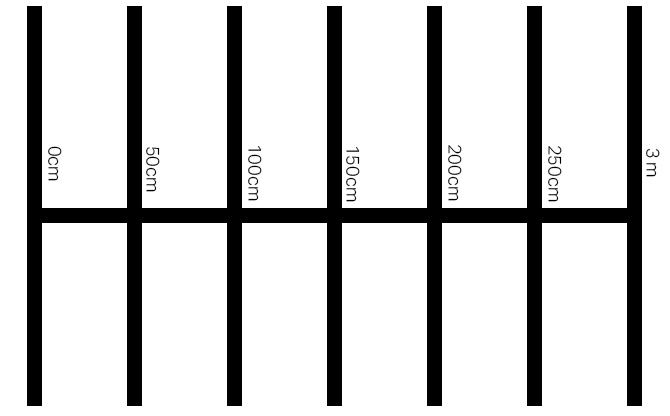
- टेप और मीटर स्टिक का उपयोग करके फर्श पर 3 मीटर की रेखा बनाएं, जैसा कि ऊपर चित्र में दिखाया गया है।
- रेखा तैयार हो जाने के बाद, टेप और मीटर स्टिक का उपयोग करके एक बार फिर 3 मीटर की रेखा के पार 1 मीटर की रेखाएं बनाएं, जैसे कि ऊपर की छवि में ऊर्ध्वाधर रेखाएं हैं। ऊर्ध्वाधर रेखा पर 0 सेमी से शुरू करके प्रत्येक 50 सेमी के निशान पर 1 मीटर की रेखा टेप करें।
- छोटी क्षैतिज रेखाएं लंबी ऊर्ध्वाधर रेखा के केंद्र में होनी चाहिए।
- जब क्षेत्र स्थापित किया जा रहा हो, तो आपकी टीम के एक या दो सदस्यों को मोमेंटम नामक एक नई परियोजना बनानी चाहिए। वेग को 50% पर सेट करें और स्पीडबोट को 50 सेमी पर पहली पंक्ति तक आगे ले जाएं। ध्यान रखें कि 1 सेमी = 10 मिमी, इसलिए रोबोट 50 सेमी या 500 मिलीमीटर आगे की ओर यात्रा करेगा।
![]() शिक्षक टूलबॉक्स
-
यह गतिविधि क्यों?
शिक्षक टूलबॉक्स
-
यह गतिविधि क्यों?
-
डेटा संग्रहण और विश्लेषण, यहां तक कि सरल पैटर्न पहचान भी मौलिक विज्ञान कौशल हैं। यह गतिविधि सामान्य गलतियों को रोककर डेटा विश्लेषण में संरचना जोड़ती है।
-
ध्यान दें कि निर्देशों में छात्रों को रोबोट की गति के साथ-साथ रोबोट की ड्राइविंग दूरी में भी परिवर्तन करने के लिए नहीं कहा गया है। यह उस बात का जानबूझकर किया गया अनुप्रयोग है जिसे सीखने वाले वैज्ञानिक चरों के नियंत्रण की रणनीति कहते हैं। नौसिखिए अन्वेषकों को एक समय में एक चर (अर्थात, इस मामले में वेग) में हेरफेर करना सिखाना, ताकि दूसरे चर (अर्थात, टक्कर के बाद गेंद द्वारा तय की गई दूरी) पर उसके प्रभाव का पता लगाया जा सके, महत्वपूर्ण है, क्योंकि यह आवश्यक नहीं है कि विद्यार्थी अनुमान और जांच वाले दृष्टिकोण के स्थान पर इसे सहज रूप से अपना लें। विशिष्ट अनुमान-और-जांच दृष्टिकोण अक्सर एक समय में एक से अधिक चर को नियंत्रित करते हैं (अर्थात, वेग और रोबोट द्वारा तय की गई दूरी दोनों को बदलते हैं) और घूर्णन के बाद गेंद द्वारा तय की गई दूरी पर संगम के प्रभाव का अवलोकन करते हैं। यह गतिविधि विद्यार्थियों को इससे दूर रखने का प्रयास करती है, क्योंकि तब चरों के बीच संबंध अस्पष्ट हो जाते हैं। क्या यह रोबोट की उच्च गति है, रोबोट द्वारा चलाई गई अधिक दूरी है, या दोनों ही हैं जो गेंद को अधिक दूरी तक ले जाते हैं? जब हम एक ही समय में दोनों चरों में हेरफेर करते हैं तो हम इसका उत्तर नहीं दे सकते।
-
हालाँकि, टीमें स्वतः ही रोबोट को अलग-अलग दूरियों तक ले जाने का प्रयास कर सकती हैं। यदि आप ऐसा देखते हैं, तो उनसे केवल दूरी बदलने को कहें, लेकिन वेग को वैसा ही रखें जैसा कि मूल 500 मिमी दूरी वाले परीक्षण में था। इस तरह, वे समान वेग की तुलना अलग-अलग ड्राइविंग दूरियों से कर सकते हैं, ताकि यह देखा जा सके कि रोबोट की ड्राइविंग दूरी भी गेंद की यात्रा की दूरी को प्रभावित करती है या नहीं।
चरण 6: टकराव के दौरान ऊर्जा के हस्तांतरण का परीक्षण

रोबोट और गेंद के साथ गेंदबाजी चुनौती परीक्षण क्षेत्र
गेंद को 50 सेमी पर क्षैतिज रेखा पर केन्द्रित करें तथा अपने रोबोट को इस प्रकार रखें कि उसका अगला भाग 0 सेमी पर क्षैतिज रेखा पर केन्द्रित हो। सुनिश्चित करें कि रोबोट का अगला भाग गेंद की दिशा में हो। अपना पहला मोमेंटम प्रोजेक्ट चलाएं जिसमें वेग 50% पर सेट हो और रोबोट के गेंद से टकराने पर पूरा ध्यान दें।
इस डेटा तालिका (Google / .pdf) में सेट वेग, तय की गई दूरी और गेंद द्वारा तय की गई दूरी को रिकॉर्ड करें। तालिका की पहली पंक्ति आपके लिए उस मोमेंटम परियोजना के आधार पर शुरू की गई है जिस पर आपने पिछले चरण में काम किया था। जैसे-जैसे आप अलग-अलग वेग सेट करने का प्रयास करते हैं, इस तालिका में डेटा जोड़ना जारी रखें। फिर आप कक्षा के रूप में अपने निष्कर्षों पर चर्चा करते समय अन्य टीमों का डेटा भी जोड़ सकते हैं।
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
-
गेंद को अलग-अलग दिशाओं में अलग-अलग दूरी तक उछालने के लिए क्षेत्र तैयार करें। आवश्यकतानुसार दरवाजे और/या खिड़कियाँ बंद कर दें।
-
वेग अन्वेषण हेतु तालिका को नीचे से सहेजा जा सकता है, या छात्र अपनी इंजीनियरिंग नोटबुक में तालिका को पुनः बना सकते हैं।
-
टीम इंजीनियरिंग नोटबुक के मूल्यांकन के लिए एक रूब्रिक यहां पाया जा सकता है (Google / .docx / .pdf), और व्यक्तिगत नोटबुक के मूल्यांकन के लिए एक रूब्रिक यहां पाया जा सकता है (Google / .docx / .pdf)। जब भी आप किसी रूब्रिक के साथ विद्यार्थियों के काम का मूल्यांकन करने की योजना बनाते हैं, तो परियोजना पर काम शुरू करने से पहले उनके साथ रूब्रिक साझा करना सुनिश्चित करें।

डेटा एकत्र करते समय अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए प्रश्नों के बारे में सोचें और उनका उत्तर दें:
- आप कैसे बता सकते हैं कि टक्कर के दौरान रोबोट के संवेग ने गेंद को ऊर्जा हस्तांतरित की? विस्तार से समझाएं।
- परीक्षण को कम से कम दो बार और दोहराएं। 50% से कम वेग का प्रयास करें। गेंद को उसकी स्थिति में पुनः स्थापित करें और तालिका में दर्ज करें कि गेंद कितनी दूरी तक गई। इसके अलावा, 50% से अधिक वेग का प्रयास करें। गेंद को उसकी स्थिति में पुनः स्थापित करें और तालिका में दर्ज करें कि गेंद कितनी दूरी तक गई।
- जब सभी समूह अपने तीन परीक्षण पूरे कर लें, तो अन्य समूहों द्वारा चुने गए वेगों तथा उनके परीक्षणों में गेंद द्वारा तय की गई दूरी पर चर्चा करें। जैसे ही टीमें अपना डेटा साझा करती हैं, उनके निष्कर्षों को अपनी तालिका में जोड़ें।
- डेटा में पैटर्न देखें। क्या निर्धारित वेग बढ़ने पर गेंद द्वारा तय की गई दूरी बढ़ती है या घटती है?
![]() शिक्षक टूलबॉक्स
-
उत्तर
शिक्षक टूलबॉक्स
-
उत्तर
-
गेंद की गति इस बात का प्रमाण है कि टक्कर के दौरान रोबोट ने ऊर्जा स्थानांतरित की। छात्र प्रभाव के बाद गेंद की गति या उसकी यात्रा की दिशा को भी साक्ष्य के रूप में बता सकते हैं।
-
गेंद द्वारा तय की गई दूरी प्रयुक्त गेंद के द्रव्यमान/भार तथा रोबोट के लिए निर्धारित वेग पर निर्भर करती है।
-
विद्यार्थियों को यह समझना चाहिए कि उच्च वेग से गेंद कम वेग की तुलना में अधिक दूरी तक जाती है। इसे स्पष्ट रूप से रोबोट की गति से जोड़ें। इस बात पर प्रकाश डालें कि रोबोट का वजन नहीं बदला है, केवल उसका वेग बदला है, लेकिन दोनों रोबोट की गति में योगदान करते हैं। उनसे पूछें कि क्या उन्हें लगता है कि यदि रोबोट भारी होता तो गेंद इतनी ही दूर तक जाती। संभवतः ऐसा होगा। अगले भाग में टक्कर के दौरान गेंद के द्रव्यमान के प्रभाव के बारे में अधिक जानकारी दी गई है।
-
छात्र समूहों ने व्यापक रूप से परिवर्तनशील वेगों का चयन किया होगा, लेकिन समग्र शिक्षण उद्देश्य यह है कि छात्र यह पहचानें कि उच्च वेग से अधिक संवेग उत्पन्न होता है, जो टकराव के दौरान गेंद को अधिक ऊर्जा स्थानांतरित करता है।